슬립·미분·관측: 잡음 데이터로부터 레이트‑앤드‑스테이트 마찰 파라미터와 내부 상태를 추정하는 새로운 프레임워크
📝 원문 정보
- Title: Slip, Differentiate, Observe: State and Parameter Estimation for Rate and State Friction from Noisy Data
- ArXiv ID: 2512.01705
- 발행일: 2025-12-01
- 저자: David Michael Riley, Diego Gutiérrez-Oribio, Ioannis Stefanou
📝 초록 (Abstract)
마찰 특성을 정량화하는 일은 지구 및 외계 행성의 지구역학에서 여전히 큰 난제이며, 실험 샘플, 실험 장비, 지구물리 관측 모두 제한적이다. 본 연구는 비선형 제어 이론에 기반한 해석·수치 프레임워크를 제시하여, 지진 단층의 마찰 거동을 추정한다. 잡음이 섞인 슬립 측정값으로부터, 우리는 측정 잡음을 억제하는 Robust Exact Filtering Differentiator (REFD)를 이용해 슬립 속도와 마찰 응답을 유한 시간 내에 재구성한다. 이러한 재구성을 바탕으로, 내부 상태 변수와 레이트‑앤드‑스테이트 마찰(RSF) 법칙의 핵심 파라미터 a·b와 d_c를 추정하는 지수 수렴 적응 이득 옵저버를 설계한다. 수치 실험 결과, 데이터가 충분히 풍부한 고속 슬립 구간에서는 파라미터를 약 20 % 오차 수준으로 복원하고, 잡음이 존재함에도 불구하고 RSF 상태 변수를 정확히 추적한다. 반면, 슬로우 슬라이딩 구간은 관측 가능성이 부족해 신뢰할 만한 추정이 어렵다. 또한 확장 시스템에 대한 관측 가능성 및 식별 가능성 조건을 제시하여 추가 파라미터 결정과 보다 진보된 제어‑이론 기반 마찰·상태 식별 방법의 가능성을 제시한다. 비록 본 방법을 축‑슬라이더 모형에 적용했지만, 전단·정규 응력에 대한 실험 접근이 필요한 전통적인 RSF 보정 방법보다 개선된 결과를 제공한다. 수렴 보장과 명시적 오류 경계가 제공되며, RSF를 전방 시뮬레이션에 포함한 모델 기반 역산에도 활용될 수 있다.💡 논문 핵심 해설 (Deep Analysis)
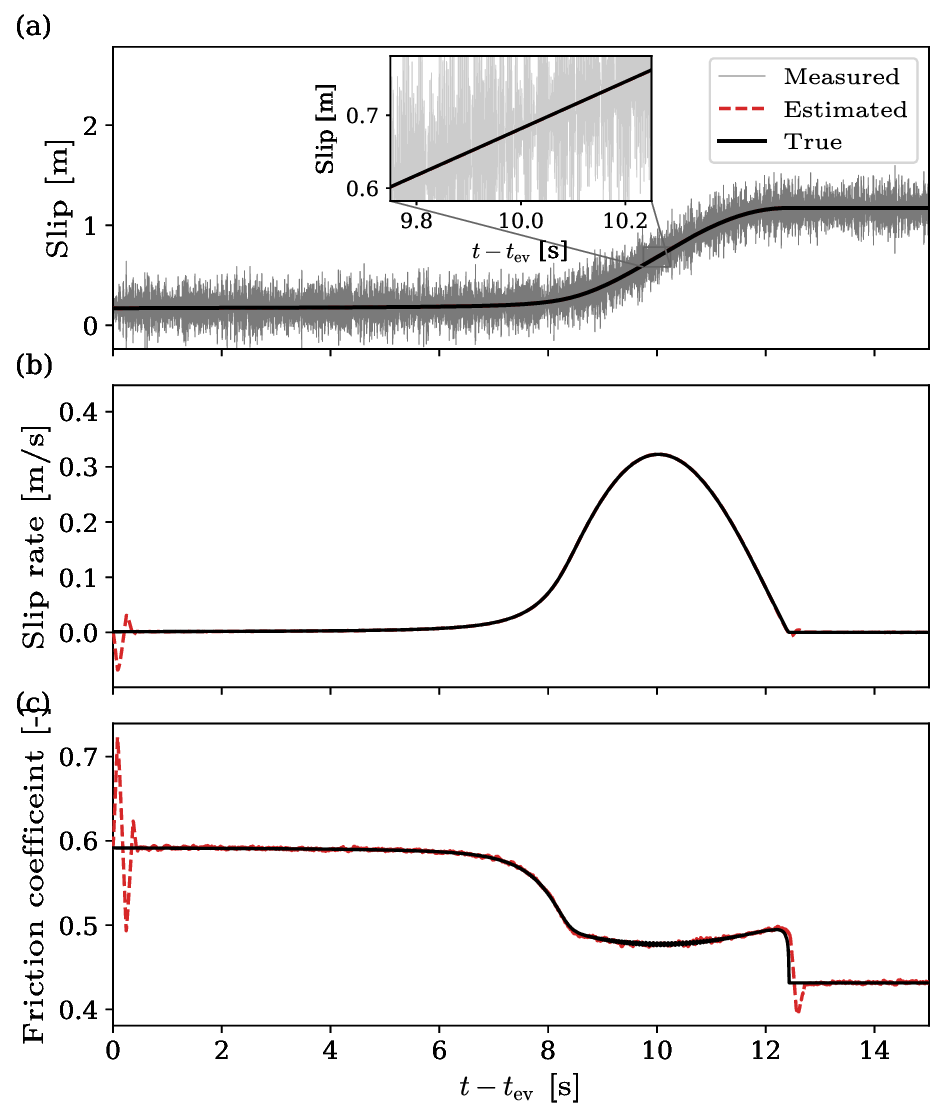
두 번째 단계는 이렇게 얻어진 슬립 속도와 마찰 응답을 이용해 레이트‑앤드‑스테이트(RSF) 마찰 모델의 내부 상태 변수(θ)와 파라미터 a·b, d_c를 추정하는 적응 관측기를 설계하는 것이다. 저자들은 기존의 선형 관측기 설계가 비선형 RSF 방정식에 적용되기 어려운 점을 지적하고, 비선형 시스템에 대한 ‘exponential‑convergent adaptive‑gain observer’를 도입한다. 이 옵저버는 상태와 파라미터 추정 오차가 시간에 따라 지수적으로 감소하도록 설계되었으며, 관측 가능성(Observability)과 식별 가능성(Identifiability)에 대한 수학적 조건을 명시한다. 특히, 고속 슬립 구간에서는 슬립 속도와 마찰 응답이 충분히 변동하여 시스템이 완전 관측 가능함을 증명하고, 이때 파라미터 추정 오차가 20 % 수준으로 수렴한다는 실험 결과를 제시한다. 반대로, 슬로우 슬라이딩 구간에서는 입력 신호가 거의 정적에 가까워 관측 가능성이 상실되므로 파라미터 추정이 불안정해진다. 이는 실제 지진 현상에서 급격한 지진 전조와 완만한 변위 구간을 구분하는 데 중요한 통찰을 제공한다.
또한 논문은 관측 가능성 조건을 이용해 추가 파라미터(예: 온도 의존성, 비선형 탄성 계수 등)까지 확장 가능한 프레임워크를 제시한다. 이는 기존 실험실 기반 RSF 보정이 전단·정규 응력 측정을 필요로 하는 반면, 제안된 방법은 슬립 변위만으로도 충분히 파라미터를 추정할 수 있음을 의미한다. 따라서 현장 지진계 데이터나 우주 탐사선에서 얻는 제한된 변위 기록에도 적용 가능성이 크다.
마지막으로, 저자들은 수렴 보장과 명시적 오류 경계를 제공함으로써, 모델 기반 역산 시 불확실성 전파를 정량화할 수 있는 기반을 마련한다. 이는 향후 지진 위험 평가, 파열 시뮬레이션, 그리고 인공지능 기반 지진 예측 모델에 RSF를 통합할 때 중요한 이점으로 작용할 것이다. 전반적으로 이 연구는 비선형 제어 이론을 지구물리학에 성공적으로 도입한 사례로, 실험·관측 제한이 큰 분야에서 파라미터 식별 문제를 해결하는 새로운 패러다임을 제시한다.
📄 논문 본문 발췌 (Translation)
📸 추가 이미지 갤러리







