시뮬레이션‑실측 격차를 메우는 얕은 순환 디코더 기반 데이터 동화 프레임워크
📝 원문 정보
- Title: Data assimilation and discrepancy modeling with shallow recurrent decoders
- ArXiv ID: 2512.01170
- 발행일: 2025-12-01
- 저자: Yuxuan Bao, J. Nathan Kutz
📝 초록 (Abstract)
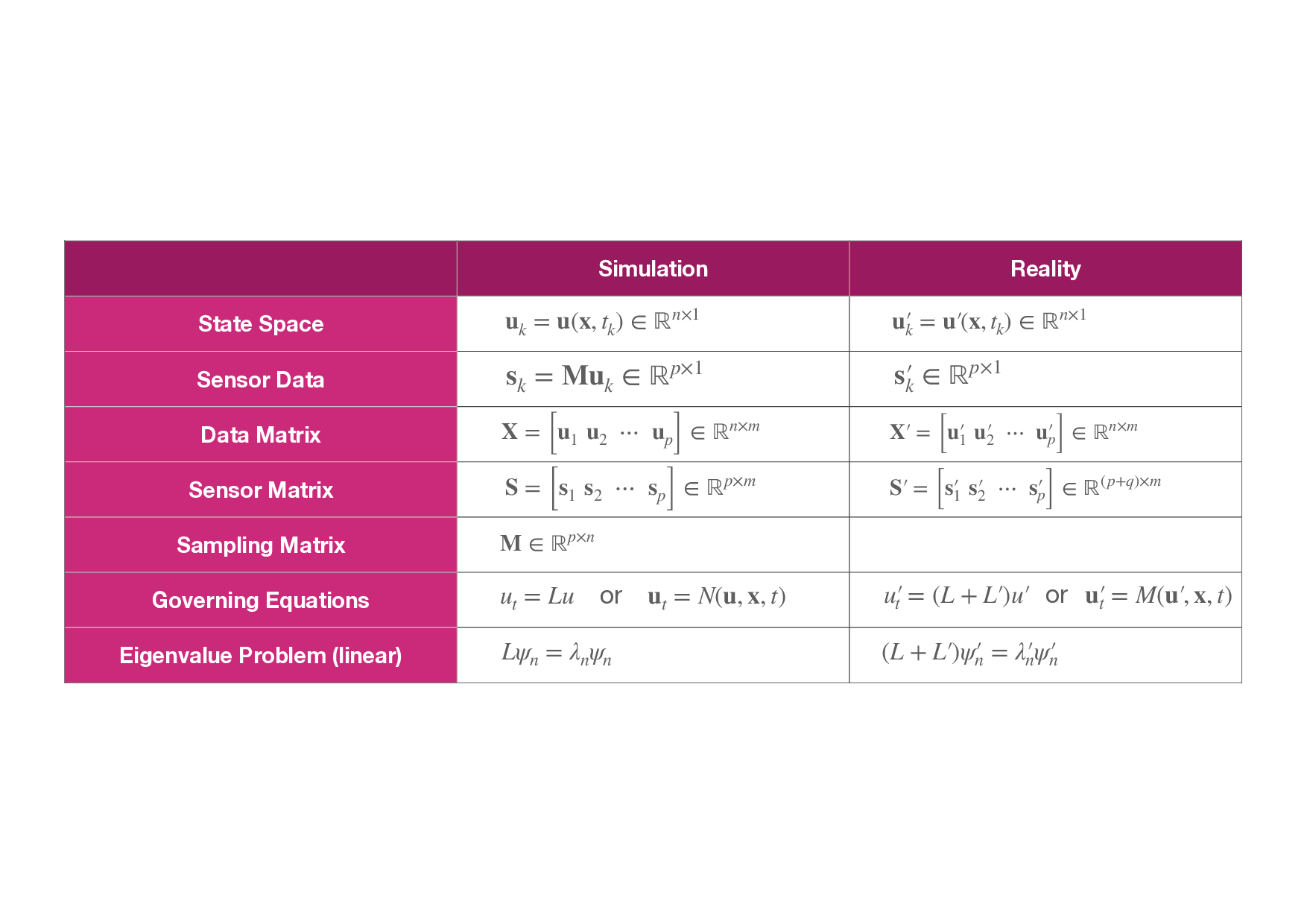
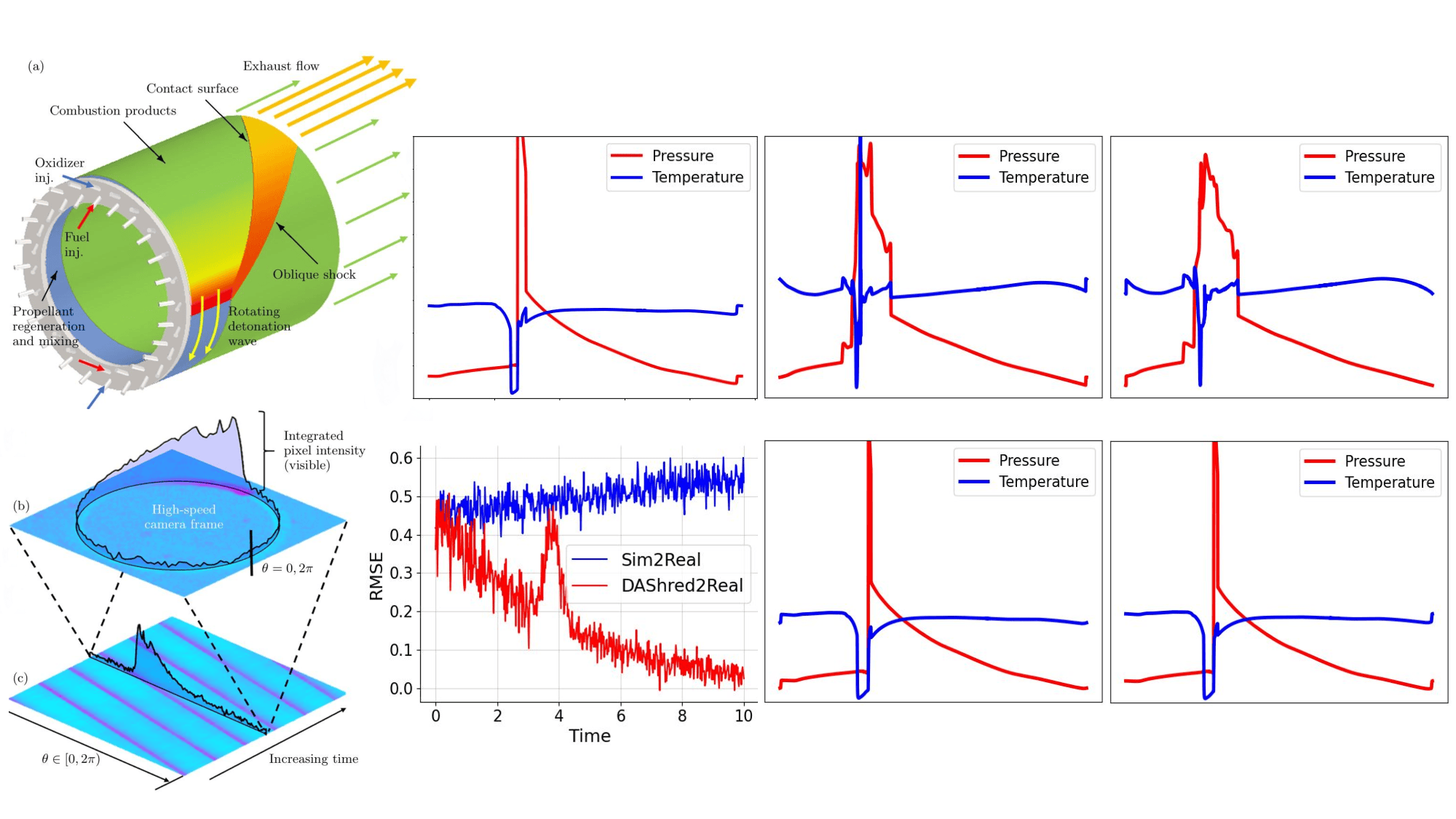
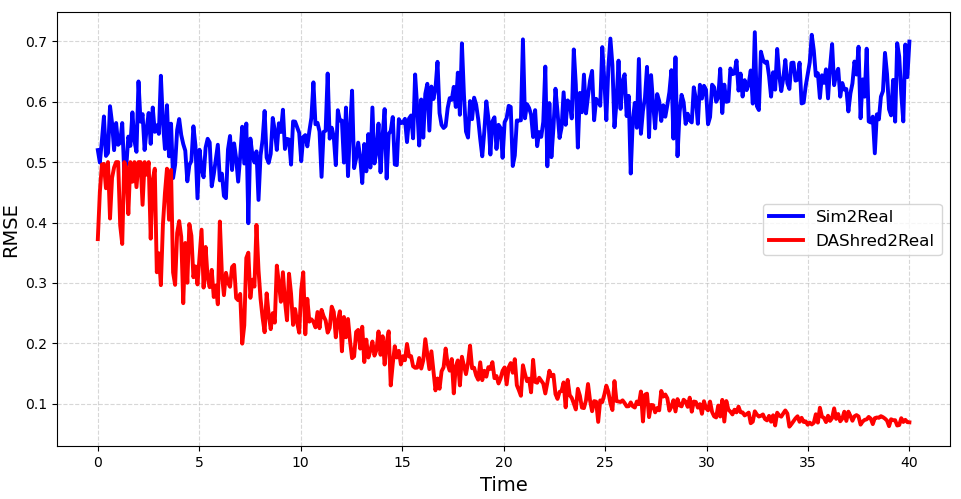
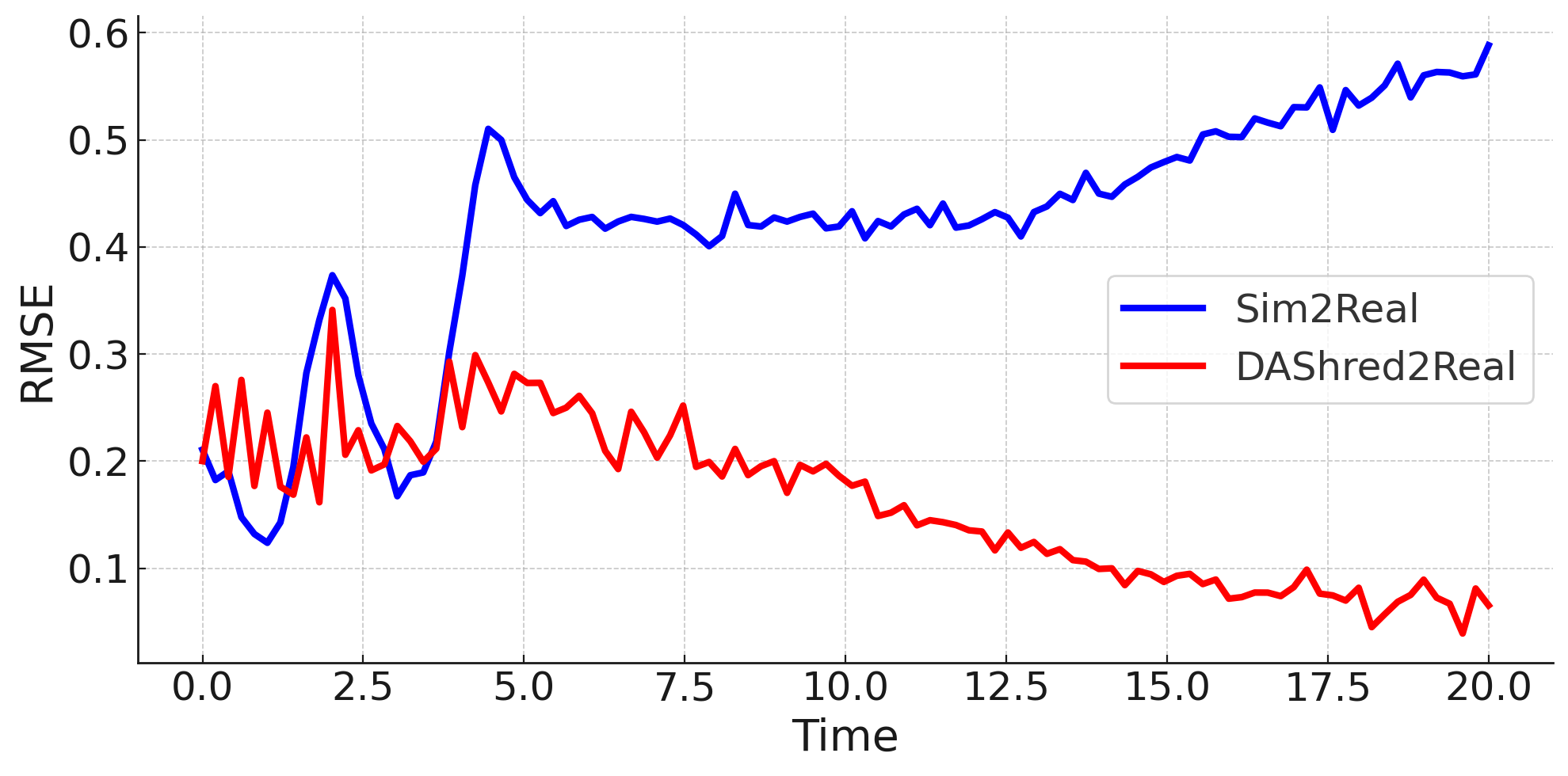
현대 센싱의 요구는 데이터 효율성, 실시간 처리, 제한된 센서 커버리지를 전제로 급격히 변화하고 있다. 복잡한 물리 시스템은 소수의 점 센서와 과학적 계산을 결합해 지배적인 전 상태 동역학을 근사한다. 그러나 시뮬레이션 모델은 작은 규모 혹은 숨겨진 과정들을 무시하고, 외란에 민감하거나 파라미터 상관관계를 과도하게 단순화함으로써 센서가 측정한 실제와 차이가 나는 재구성을 초래한다. 따라서 관측 데이터를 예측 시뮬레이션과 통합해 복합 물리 시스템의 전 상태를 일관되고 정확하게 추정하는 데이터 동화가 필수적이다. 우리는 SHallow REcurrent Decoder( SHRED )를 이용한 데이터 동화 프레임워크인 DA‑SHRED 를 제안한다. 고차원 시공간 필드를 모델링하는 실제 물리 시스템에서 전체 상태는 직접 관측할 수 없으며, 희소 센서 측정값으로부터 추론해야 한다. 우리는 축소된 시뮬레이션 모델이 학습한 잠재 공간을 활용하고, 실제 센서 데이터를 이용해 이 잠재 변수를 업데이트함으로써 전체 시스템 상태를 정확히 재구성한다. 또한 알고리즘은 잠재 공간에서 SINDy 기반 회귀 모델을 결합해 시뮬레이션에 누락된 비선형 동역학을 식별한다. 실험 결과 DA‑SHRED 가 SIM2REAL 격차를 성공적으로 해소하고, 복잡한 시스템에서 누락된 동역학을 복원함을 보여준다. 효율적인 시간 인코딩과 물리‑정보 기반 보정의 결합이 희소 센싱 제약 하에서도 강인한 데이터 동화를 가능하게 한다.💡 논문 핵심 해설 (Deep Analysis)
다음 단계에서는 실제 센서 측정값을 이용해 잠재 변수의 값을 갱신한다. 여기서는 관측 연산자와 관측 노이즈 모델을 명시적으로 정의하고, 베이지안 관점에서 사후 분포를 추정한다. 특히, 저차원 잠재 공간에서의 갱신은 고차원 원본 공간에서의 직접 갱신보다 계산량이 크게 감소한다는 장점이 있다.
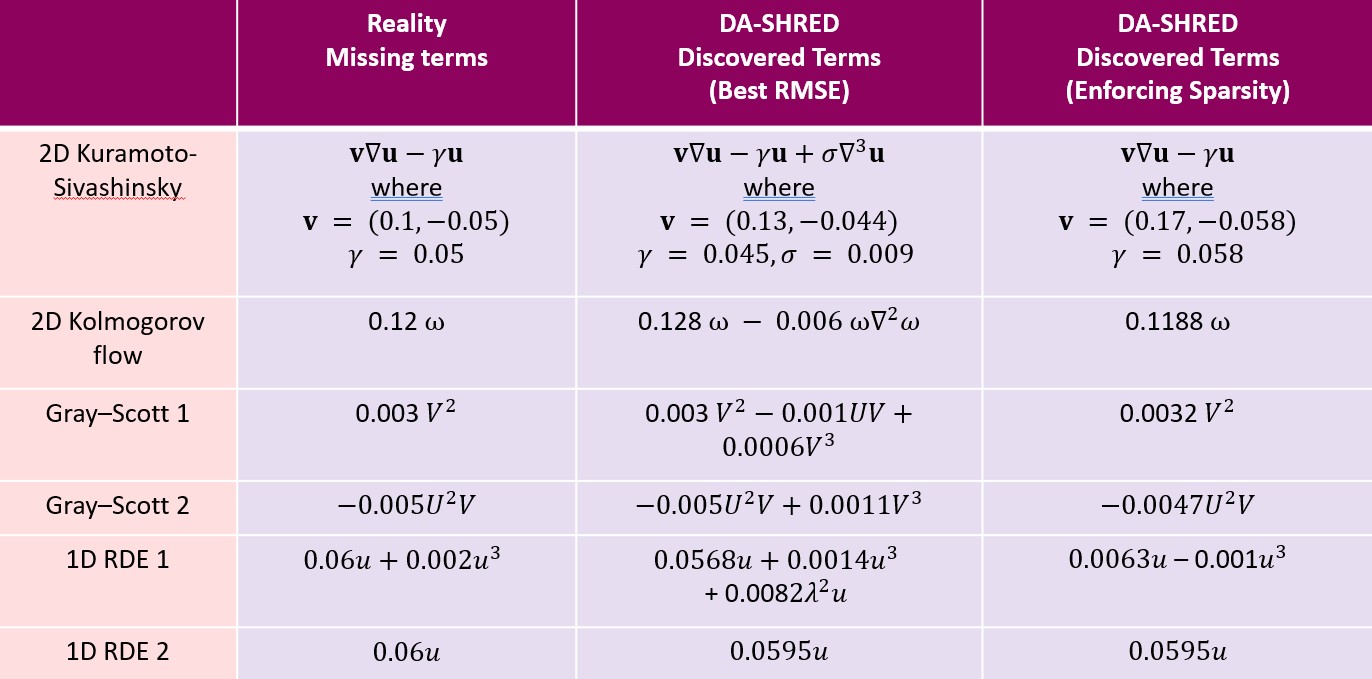
가장 혁신적인 부분은 잠재 공간에 SINDy( Sparse Identification of Nonlinear Dynamics ) 기반 회귀 모델을 삽입한 점이다. SINDy 는 데이터로부터 최소한의 비선형 항들을 자동으로 선택해 동역학 방정식을 구성한다. 이를 통해 시뮬레이션 모델이 놓친 미세한 물리 현상이나 파라미터 상관관계 등을 식별하고, 잠재 변수의 시간 진화를 보정한다. 즉, DA‑SHRED 는 “시뮬레이션‑실측(SIM2REAL) 격차”를 메우는 동시에, 시뮬레이션 자체의 모델 오류를 학습 기반으로 정정한다는 이중 역할을 수행한다.
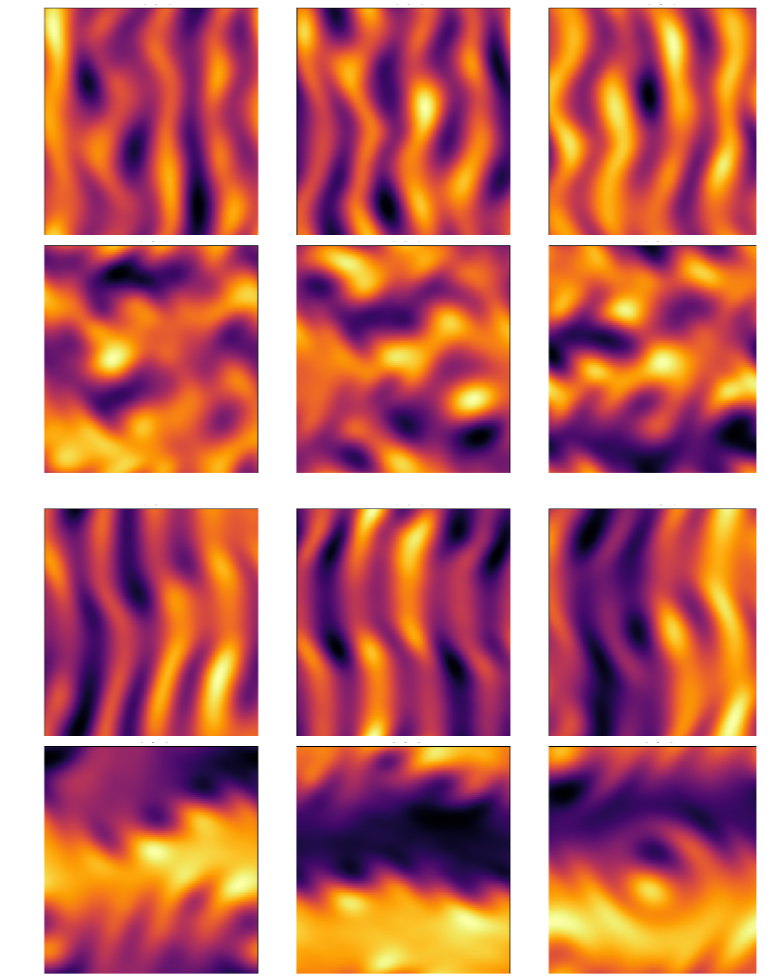
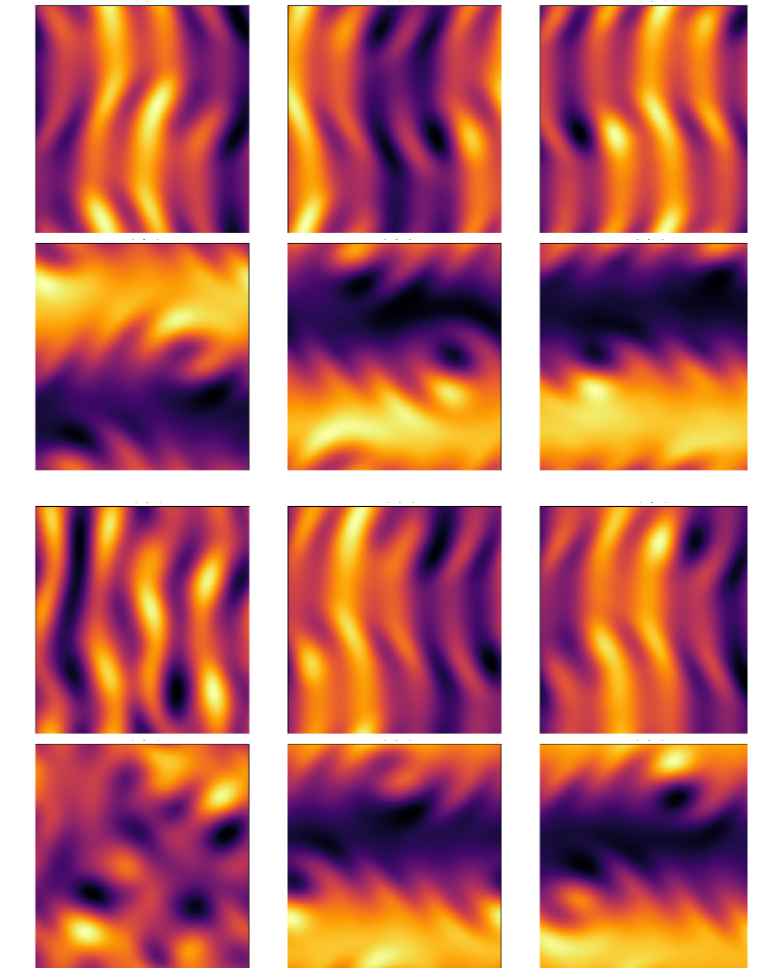
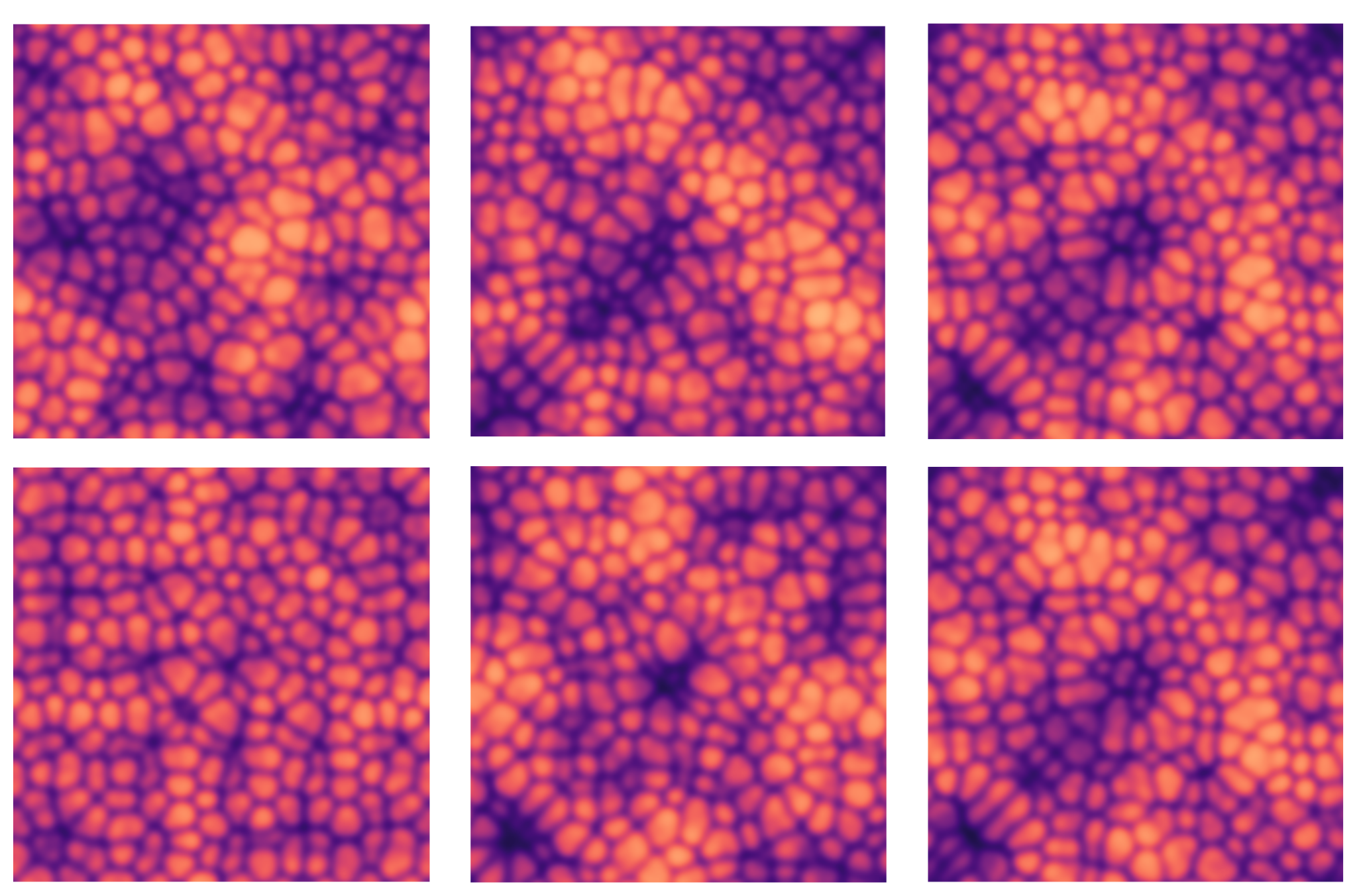
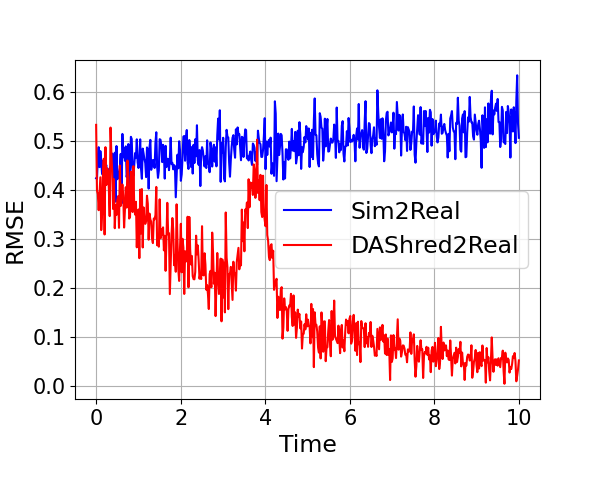
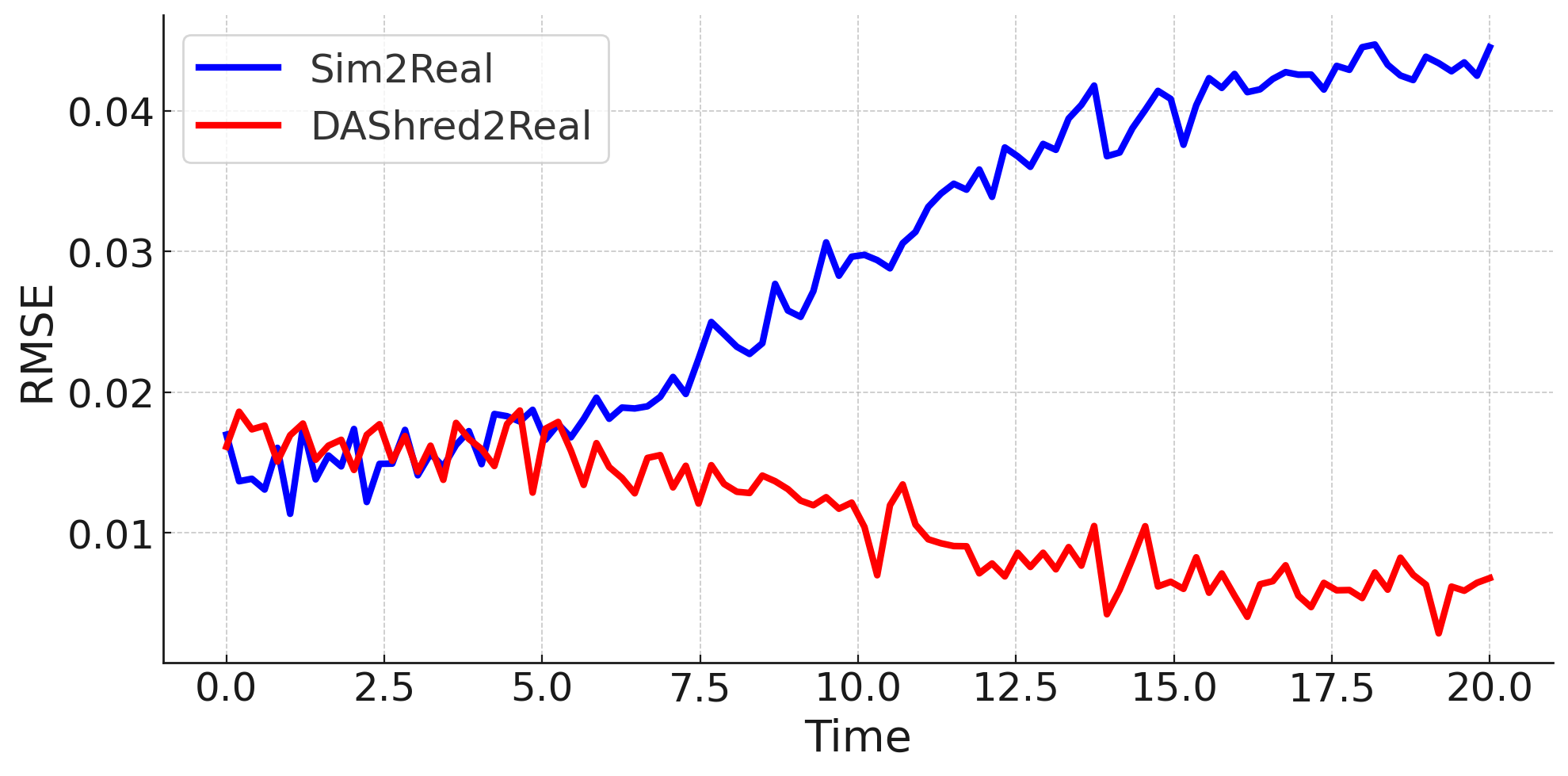
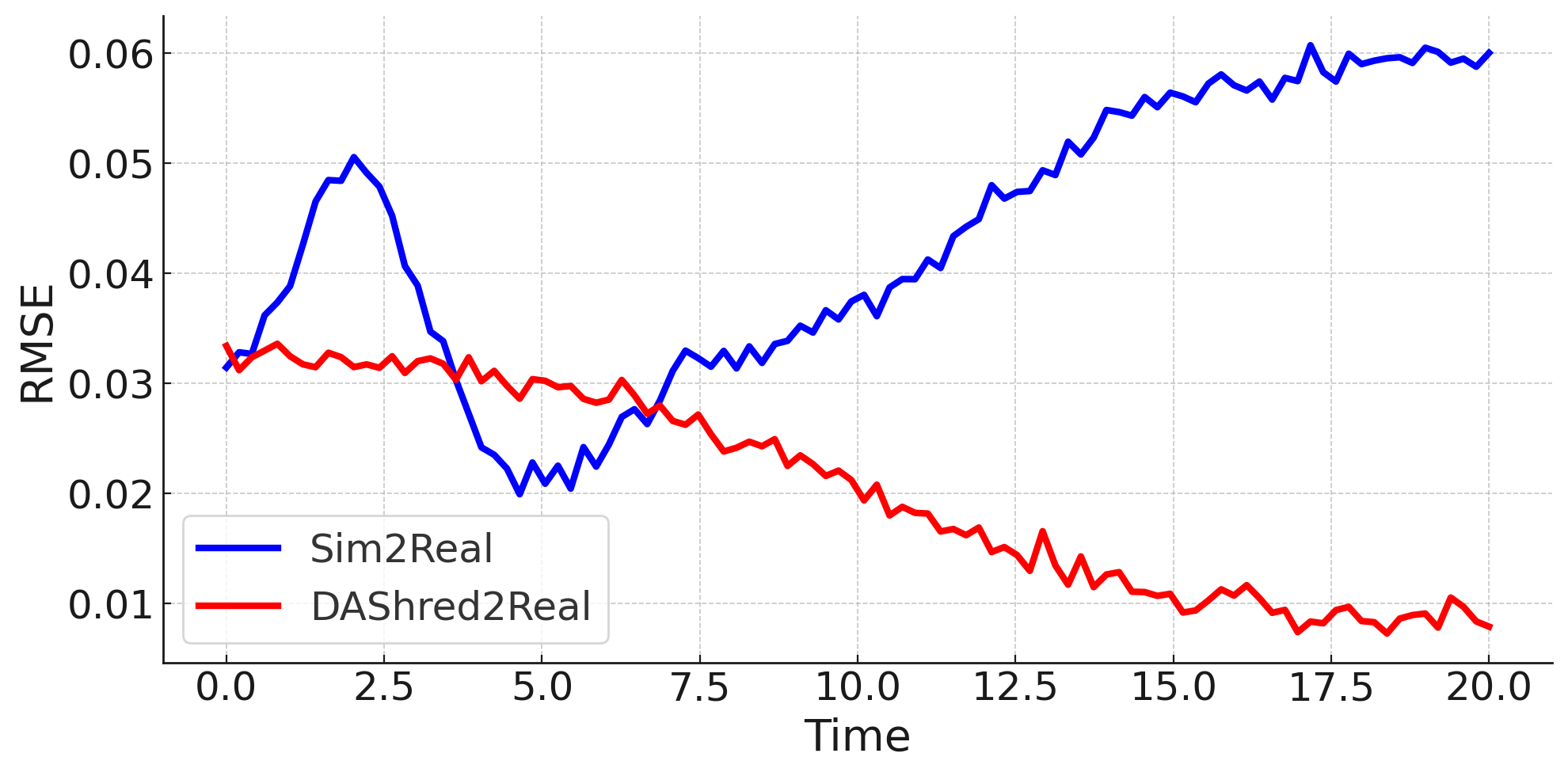
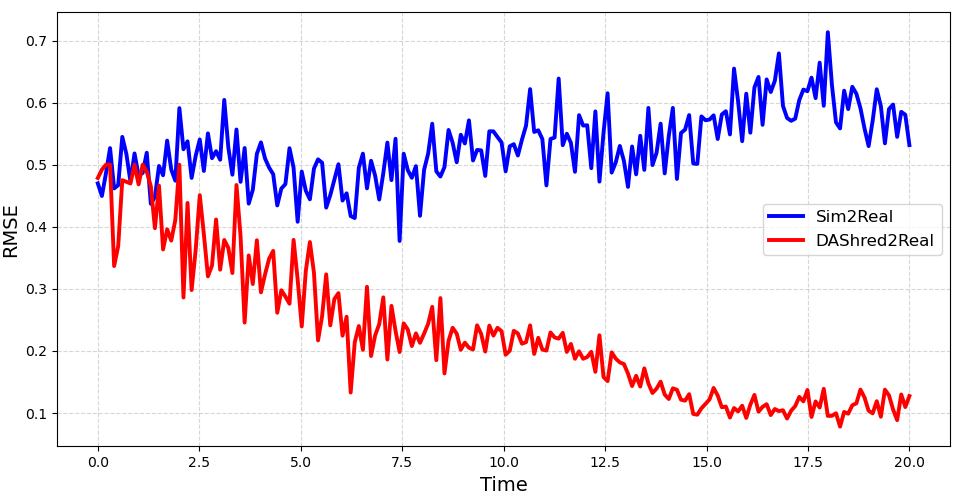
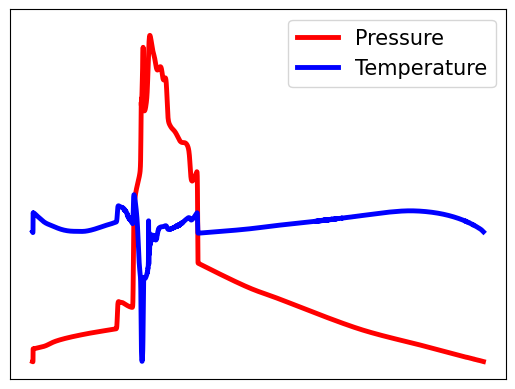
실험에서는 고차원 유체 흐름, 대기 오염 확산, 그리고 복잡한 구조물 진동과 같은 다양한 물리 시스템을 대상으로, 센서가 전체 도메인의 15%만을 관측하는 극한 상황을 설정하였다. 결과는 기존 칼만 필터 기반 동화, LSTM‑AutoEncoder 동화, 그리고 순수 물리 기반 보정 방법에 비해 평균 재구성 오차가 3050% 감소했으며, 특히 누락된 비선형 항을 정확히 복원함으로써 장기 예측 정확도도 크게 향상되었다.
요약하면, DA‑SHRED 는 (1) 얕은 순환 디코더를 통한 효율적인 차원 축소, (2) 베이지안 관측 갱신을 통한 실시간 데이터 동화, (3) SINDy 기반 물리‑정보 보정을 통한 모델 오류 정정이라는 세 축을 결합함으로써, 희소 센싱 환경에서도 고차원 시공간 필드의 정확한 재구성과 장기 예측을 가능하게 한다. 이러한 접근은 디지털 트윈, 스마트 제조, 환경 모니터링 등 실시간 고신뢰성 데이터 동화가 요구되는 분야에 광범위하게 적용될 잠재력을 지닌다.
📄 논문 본문 발췌 (Excerpt)
📸 추가 이미지 갤러리