연속 제어를 위한 차별화 가능한 무가중치 컨트롤러
📝 원문 정보
- Title: Differentiable Weightless Controllers: Learning Logic Circuits for Continuous Control
- ArXiv ID: 2512.01467
- 발행일: 2025-12-01
- 저자: Fabian Kresse, Christoph H. Lampert
📝 초록 (Abstract)
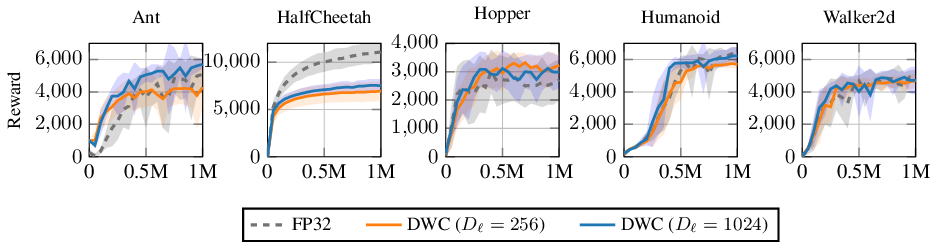
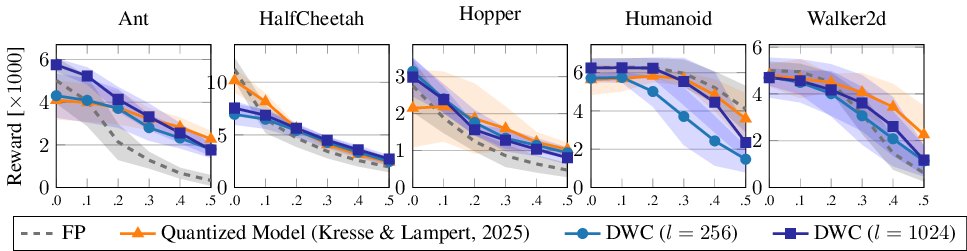
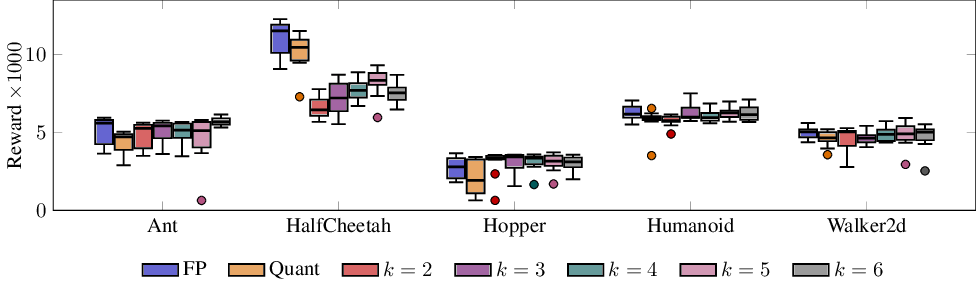
연속 제어 정책을 연속적인 신경망이 아닌 이산 논리 회로로 표현하고 학습할 수 있는지를 탐구한다. 우리는 온도계 인코딩된 입력, 희소하게 연결된 불리언 룩업 테이블 층, 경량 액션 헤드로 구성된 차별화 가능한 무가중치 컨트롤러(DWC)를 제안한다. DWC는 기울기 기반 최적화로 끝‑끝 학습이 가능하면서도 FPGA에 바로 컴파일되어 단일 클록 사이클 지연과 나노줄레벨 에너지 소비를 실현한다. MuJoCo의 다섯 가지 벤치마크(고차원 Humanoid 포함)에서 DWC는 전체 정밀도 혹은 양자화된 신경망과 경쟁력 있는 반환값을 달성한다. 네 작업에서는 성능이 동등했으며, HalfCheetah에서는 네트워크 용량이 제한 요인임을 확인하였다. 또한 DWC는 구조적으로 희소하고 해석 가능한 연결 패턴을 보여, 어떤 입력 임계값이 제어 결정에 영향을 미치는지 직접 검토할 수 있다.💡 논문 핵심 해설 (Deep Analysis)
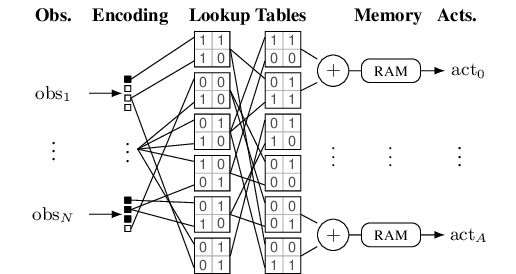
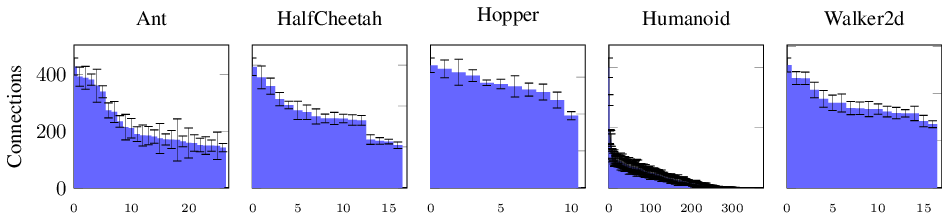
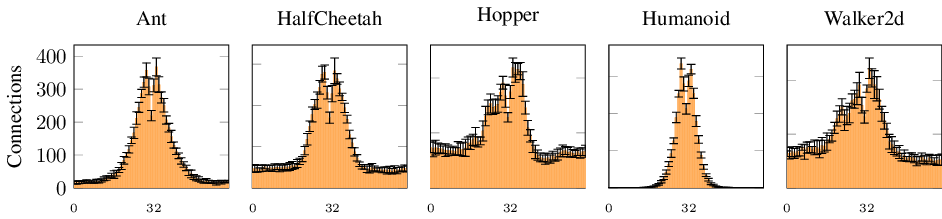
다음으로 DWC의 핵심인 ‘희소 연결 불리언 룩업 테이블(LUT) 층’은 각 뉴런이 입력 비트들의 특정 조합에 대해 0 또는 1을 반환하도록 구성된다. 이러한 LUT는 FPGA에서 직접 구현될 수 있는 기본 논리 블록과 일치하므로, 학습된 파라미터를 하드웨어로 바로 매핑할 수 있다. 특히 저자들은 LUT의 연결성을 ‘희소’하게 제한함으로써 파라미터 수를 크게 줄이고, 학습 과정에서 불필요한 연결이 자동으로 제거되는 ‘구조적 정규화’를 적용하였다. 이는 모델 용량을 효율적으로 관리하면서도 과적합 위험을 낮추는 효과를 가져온다.
학습 측면에서는 전통적인 역전파와 동일하게 미분 가능한 연산 그래프를 구성한다. 온도계 인코딩과 LUT의 이산 연산에도 부드러운 근사 함수를 도입해 기울기를 계산할 수 있게 함으로써, 표준 SGD, Adam 등 기존 최적화 알고리즘을 그대로 적용할 수 있다. 실험 결과는 흥미로운데, Humanoid와 같은 고차원 환경에서도 DWC가 기존의 32‑bit 부동소수점 신경망과 거의 동등한 성능을 보였다. 특히 HalfCheetah에서는 성능 격차가 발생했는데, 이는 현재 설계된 LUT와 연결 수가 해당 태스크에 충분한 표현력을 제공하지 못했음을 의미한다. 저자들은 이를 ‘네트워크 용량 한계’로 규정하고, 더 깊은 층이나 넓은 LUT를 추가함으로써 해결 가능하다고 제시한다.
하드웨어 구현 결과는 DWC의 실용성을 강력히 뒷받침한다. FPGA에 매핑된 회로는 단일 클록 사이클(수십 나노초 이하) 내에 액션을 출력하며, 에너지 소비는 나노줄레벨에 머문다. 이는 로봇 제어와 같은 실시간, 저전력 응용 분야에 큰 장점을 제공한다. 또한, 연결 패턴이 희소하고 논리적으로 해석 가능하다는 점은 ‘블랙박스’ 신경망의 불투명성을 해소한다는 점에서 학계·산업계 모두에게 의미가 크다. 앞으로 LUT의 자동 설계, 다중 모듈 연합, 그리고 비선형 연산(예: 곱셈)과의 혼합 구현 등이 연구될 여지가 있다.
📄 논문 본문 발췌 (Translation)
📸 추가 이미지 갤러리