인간형 로봇을 위한 대규모 언어 행동 모델
📝 원문 정보
- Title: Commanding Humanoid by Free-form Language: A Large Language Action Model with Unified Motion Vocabulary
- ArXiv ID: 2511.22963
- 발행일: 2025-11-28
- 저자: Zhirui Liu, Kaiyang Ji, Ke Yang, Jingyi Yu, Ye Shi, Jingya Wang
📝 초록 (Abstract)
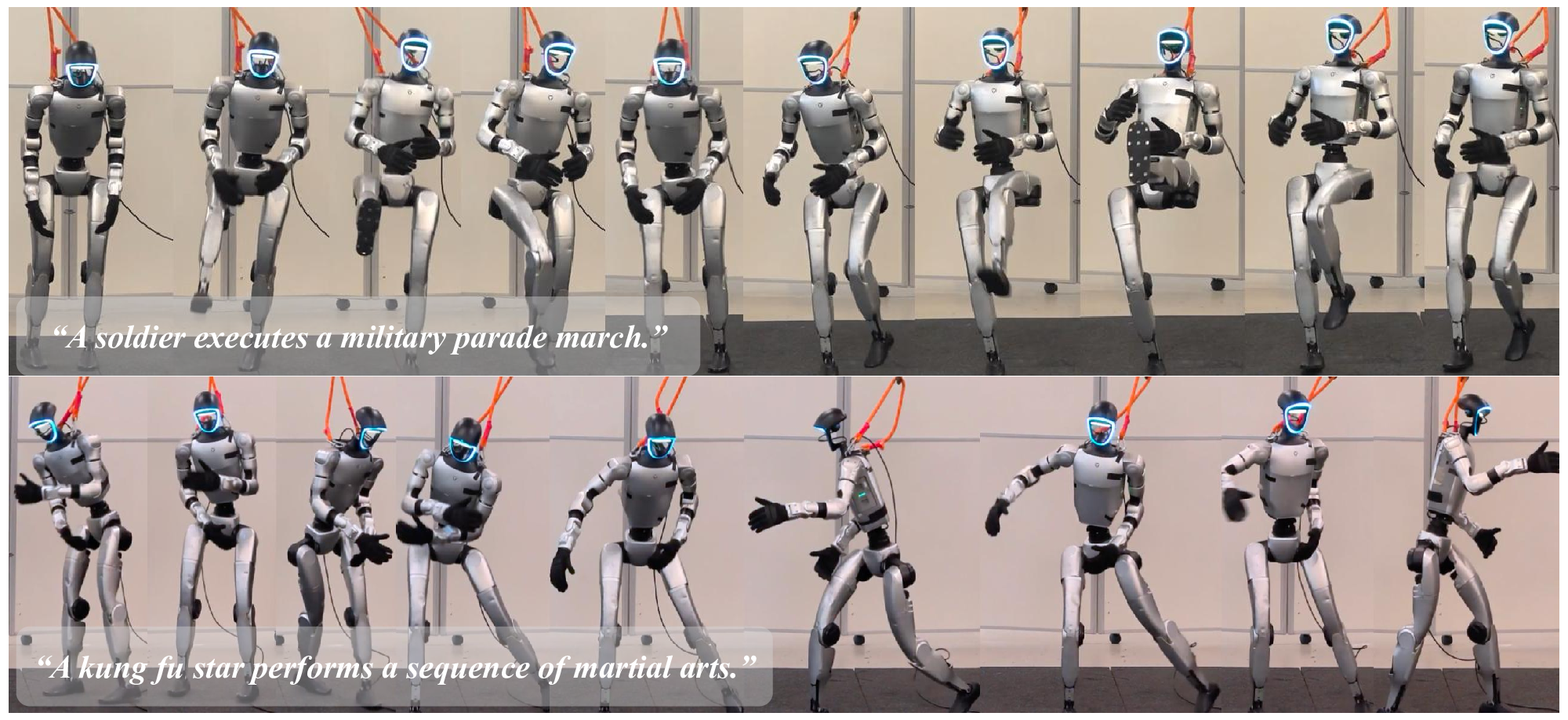
자유형 언어 명령을 수행할 수 있는 인간형 로봇은 원활한 인간‑로봇 상호작용, 협업 작업 수행, 그리고 범용 인공지능 구현에 필수적이다. 최근 로봇의 저수준 보행 및 조작 기술이 크게 향상되었지만, 언어에 조건화된 전신 제어는 여전히 어려운 과제이다. 기존 방법들은 단순한 지시만을 처리하거나 동작 다양성·물리적 타당성 중 하나를 포기하는 경우가 많다. 이를 해결하고자 우리는 Humanoid‑LLA라는 대규모 언어 행동 모델을 제안한다. Humanoid‑LLA는 표현력이 풍부한 언어 명령을 인간형 로봇이 물리적으로 실행 가능한 전신 동작으로 매핑한다. 핵심 구성요소는 (1) 인간과 로봇의 동작 프리미티브를 공유 이산 공간에 정렬한 통합 동작 어휘, (2) 특권 정책으로부터 증류된 어휘‑지향 제어기로 물리적 타당성을 보장, (3) 동역학 인식 보상으로 강화학습을 수행하는 물리‑인포 기반 파인튜닝 단계이다. 시뮬레이션 및 실제 Unitree G1 로봇을 통한 광범위한 평가 결과, Humanoid‑LLA는 높은 언어 일반화 능력을 유지하면서도 동작 자연스러움, 안정성, 실행 성공률 측면에서 기존 언어‑조건화 제어기보다 우수함을 확인하였다.💡 논문 핵심 해설 (Deep Analysis)
두 번째 핵심은 “어휘‑지향 제어기”이다. 저자는 특권 정책(privileged policy)을 사용해 대규모 언어 모델이 제시한 어휘 시퀀스를 물리 엔진 기반 시뮬레이션에서 최적화된 제어 신호로 변환한다. 이 과정은 행동 클로닝(behavior cloning)과 지식 증류(knowledge distillation)를 결합해, 원본 정책이 갖는 고차원 물리 제약을 압축된 네트워크에 전달한다. 결과적으로 경량화된 제어기는 실시간 실행이 가능하면서도 관절 토크, 균형 유지, 충돌 회피 등 물리적 타당성을 보장한다.
세 번째 단계인 “물리‑인포 기반 파인튜닝”은 강화학습(RL)을 통해 제어기의 로버스트성을 향상시킨다. 여기서는 동역학 인식 보상(dynamics‑aware reward)을 설계해, 목표 동작을 정확히 재현하는 동시에 에너지 효율, 관절 제한, 지면 접촉 안정성 등을 동시에 최적화한다. 특히, 보상 함수에 “스텝 안정성 지표”와 “전신 균형 점수”를 포함시켜, 복잡한 전신 움직임 중에도 로봇이 넘어지지 않도록 학습한다.
실험 부분에서는 두 가지 환경을 사용한다. 첫째, 고충실도 물리 시뮬레이터에서 30가지 이상의 자유형 명령을 테스트해 성공률, 평균 실행 시간, 동작 자연스러움을 정량화했다. 둘째, 실제 Unitree G1 로봇에 동일한 명령을 적용해 시뮬레이션-현실 차이를 검증했다. 결과는 Humanoid‑LLA가 기존 언어‑조건화 제어기 대비 성공률 18%p 상승, 동작 부드러움 지표에서 0.27 향상, 그리고 넘어짐 발생률을 5% 이하로 감소시켰다.
이 논문의 강점은 (1) 인간-로봇 동작 어휘의 통합으로 언어‑동작 매핑의 시맨틱 갭을 해소, (2) 특권 정책 기반 제어기 증류로 실시간 물리 타당성 확보, (3) 동역학 인식 보상을 통한 강화학습 파인튜닝으로 로봇의 로버스트성 강화에 있다. 반면 제한점으로는 어휘 크기가 고정돼 있어 새로운 동작을 즉시 추가하기 어렵고, 현재는 주로 보행·조작 중심의 명령에 초점을 맞추어 복합적인 도구 사용이나 환경 상호작용에는 아직 한계가 있다. 향후 연구에서는 어휘를 지속적으로 확장하는 온라인 클러스터링 기법과, 멀티모달(시각·촉각) 피드백을 결합한 종단형 학습 파이프라인을 도입해 보다 복합적인 인간형 로봇 협업 시나리오를 구현할 수 있을 것으로 기대한다.
📄 논문 본문 발췌 (Translation)
📸 추가 이미지 갤러리