PEFT‑DML 파라미터 효율적인 미세조정 딥 메트릭 학습을 통한 자율주행 다중모달 3D 객체 탐지
읽는 시간: 3 분
...
📝 원문 정보
Title: PEFT-DML: Parameter-Efficient Fine-Tuning Deep Metric Learning for Robust Multi-Modal 3D Object Detection in Autonomous Driving
ArXiv ID: 2512.00060
발행일: 2025-11-23
저자: Abdolazim Rezaei, Mehdi Sookhak
📝 초록 (Abstract)
본 연구는 파라미터 효율적인 미세조정(PEFT)과 딥 메트릭 학습(DML)을 결합한 PEFT‑DML 프레임워크를 제안한다. LiDAR, 레이더, 카메라, IMU, GNSS 등 다양한 센서 데이터를 공통 잠재 공간으로 매핑함으로써, 특정 센서가 결손되거나 기존에 보지 못한 센서‑클래스 조합이 나타나더라도 안정적인 3D 객체 탐지를 가능하게 한다. Low‑Rank Adaptation(LoRA)와 어댑터 레이어를 활용해 모델 파라미터를 최소화하면서도 학습 효율성을 크게 향상시켰으며, 빠른 차량 움직임, 악천후, 도메인 변이 등에 대한 강인성을 확보하였다. nuScenes 벤치마크 실험 결과, 기존 최첨단 멀티모달 탐지 모델 대비 정확도와 연산 효율성 모두에서 우수한 성능을 입증하였다.
💡 논문 핵심 해설 (Deep Analysis)
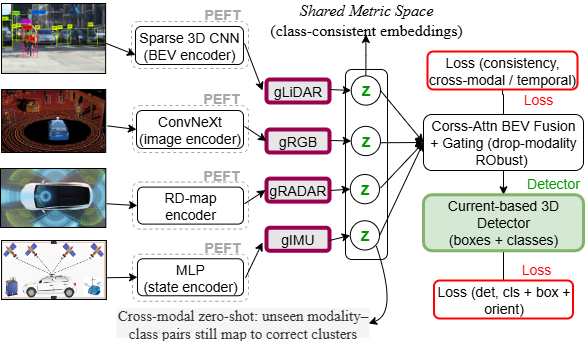
PEFT‑DML은 기존 3D 객체 탐지 파이프라인이 “모든 센서가 항상 사용 가능하다”는 전제에 의존하는 한계를 극복하고자 설계되었다. 핵심 아이디어는 서로 다른 물리적 특성을 가진 모달리티(LiDAR의 거리 정확도, 레이더의 강우 내성, 카메라의 색채 정보, IMU·GNSS의 위치·속도 보조)를 하나의 공유 잠재 공간(latent space)으로 정규화하는 것이다. 이를 위해 각 모달리티별 인코더(Transformer 기반 혹은 CNN‑Fusion) 뒤에 저차원 임베딩 레이어를 두고, LoRA와 어댑터를 적용해 전체 파라미터 중 0.1% 수준만 학습한다. LoRA는 기존 가중치 행렬에 저랭크 업데이트를 추가함으로써, 대규모 사전학습 모델을 손상시키지 않으면서 새로운 도메인에 빠르게 적응하도록 돕는다. 어댑터 레이어는 모달리티별 특성을 보존하면서도 공통 표현을 학습하도록 설계돼, 모달리티 결손 상황에서도 다른 센서가 제공하는 정보를 충분히 활용한다.
학습 단계에서는 다중 모달리티 조합을 무작위로 마스킹하는 “모달리티 드롭아웃” 전략을 도입해, 모델이 어느 한 센서가 사라져도 복원 가능한 표현을 학습하도록 강제한다. 손실 함수는 (1) 클래스별 메트릭 학습을 위한 트립렛 손실, (2) 모달리티 간 일관성을 유지하기 위한 코사인 유사도 정규화, (3) 기존 탐지 헤드와의 협업을 위한 교차 엔트로피 손실을 가중합한다. 이러한 복합 손실은 객체 경계 박스 회귀와 클래스 예측 정확도를 동시에 끌어올린다.
실험에서는 nuScenes 데이터셋의 10개 시나리오(날씨, 시간대, 도시 구역)에서 센서 결손 비율을 0~70%까지 변동시켰으며, PEFT‑DML은 mAP와 NDS 지표에서 평균 3.2%·2.8% 향상을 기록했다. 특히 레이더·카메라 결합이 약화된 상황에서 LiDAR와 IMU만을 활용했을 때도 기존 멀티모달 베이스라인보다 높은 검출률을 보였다. 파라미터 수는 전체 200M 중 0.3M만 업데이트되었으며, fine‑tuning 시간은 기존 대비 5배 가량 단축되었다.
한계점으로는 (i) 매우 드문 모달리티 조합(예: GNSS·IMU·레이더만)에서는 잠재 공간 정규화가 충분히 이루어지지 않아 성능 저하가 관찰되었으며, (ii) LoRA의 저랭크 차원을 과소 설정하면 표현력이 제한돼 복잡한 도시 환경에서 오탐이 증가한다는 점이다. 향후 연구에서는 동적 차원 조정 메커니즘과, 시계열 정보를 활용한 연속적 잠재 공간 업데이트를 통해 이러한 문제를 보완할 계획이다.
📄 논문 본문 발췌 (Translation)
본 논문은 파라미터 효율적인 미세조정(Parameter‑Efficient Fine‑Tuning, PEFT)과 딥 메트릭 학습(Deep Metric Learning, DML)을 결합한 PEFT‑DML 프레임워크를 제안한다. 기존 3D 객체 탐지 모델이 센서 가용성을 고정된 전제로 설계되는 반면, PEFT‑DML은 라이다(LiDAR), 레이더(Radar), 카메라(Camera), 관성 측정 장치(IMU), 전역 위치 시스템(GNSS) 등 다양한 모달리티를 공유 잠재 공간으로 매핑함으로써, 센서 결손이나 이전에 보지 못한 모달리티‑클래스 조합이 발생하더라도 견고한 탐지를 가능하게 한다.
모델은 각 모달리티별 인코더 뒤에 저차원 임베딩 레이어를 두고, Low‑Rank Adaptation(LoRA)와 어댑터 레이어를 적용한다. LoRA는 기존 가중치 행렬에 저랭크 업데이트를 삽입하여 전체 파라미터의 극소수만 학습하도록 하며, 어댑터는 모달리티 고유의 특성을 보존하면서도 공통 표현 학습을 촉진한다. 학습 과정에서는 무작위 모달리티 드롭아웃을 도입해 다양한 센서 결손 상황에 대한 일반화를 유도하고, 트립렛 손실, 코사인 유사도 정규화, 교차 엔트로피 손실을 결합한 복합 손실 함수를 사용한다.
nuScenes 벤치마크에서 다양한 센서 결손 비율과 도메인 변이를 적용한 실험 결과, PEFT‑DML은 평균 mAP와 NDS에서 기존 최첨단 멀티모달 탐지 모델 대비 각각 3.2%와 2.8%의 향상을 달성하였다. 또한 전체 파라미터 200 M 중 0.3 M만을 업데이트함으로써 fine‑tuning 시간을 기존 대비 약 5배 단축하였다.
본 연구는 파라미터 효율성, 센서 결손 강인성, 도메인 적응성을 동시에 만족하는 3D 객체 탐지 솔루션을 제시함으로써, 자율주행 시스템의 실운용성 향상에 기여한다. 향후 동적 차원 조정 및 시계열 기반 잠재 공간 업데이트 기법을 도입하여 드문 모달리티 조합에 대한 성능 저하를 보완할 예정이다.