빠른 언어 행동 선호 학습
📝 원문 정보
- Title: QuickLAP: Quick Language-Action Preference Learning for Autonomous Driving Agents
- ArXiv ID: 2511.17855
- 발행일: 2025-11-22
- 저자: Jordan Abi Nader, David Lee, Nathaniel Dennler, Andreea Bobu
📝 초록 (Abstract)
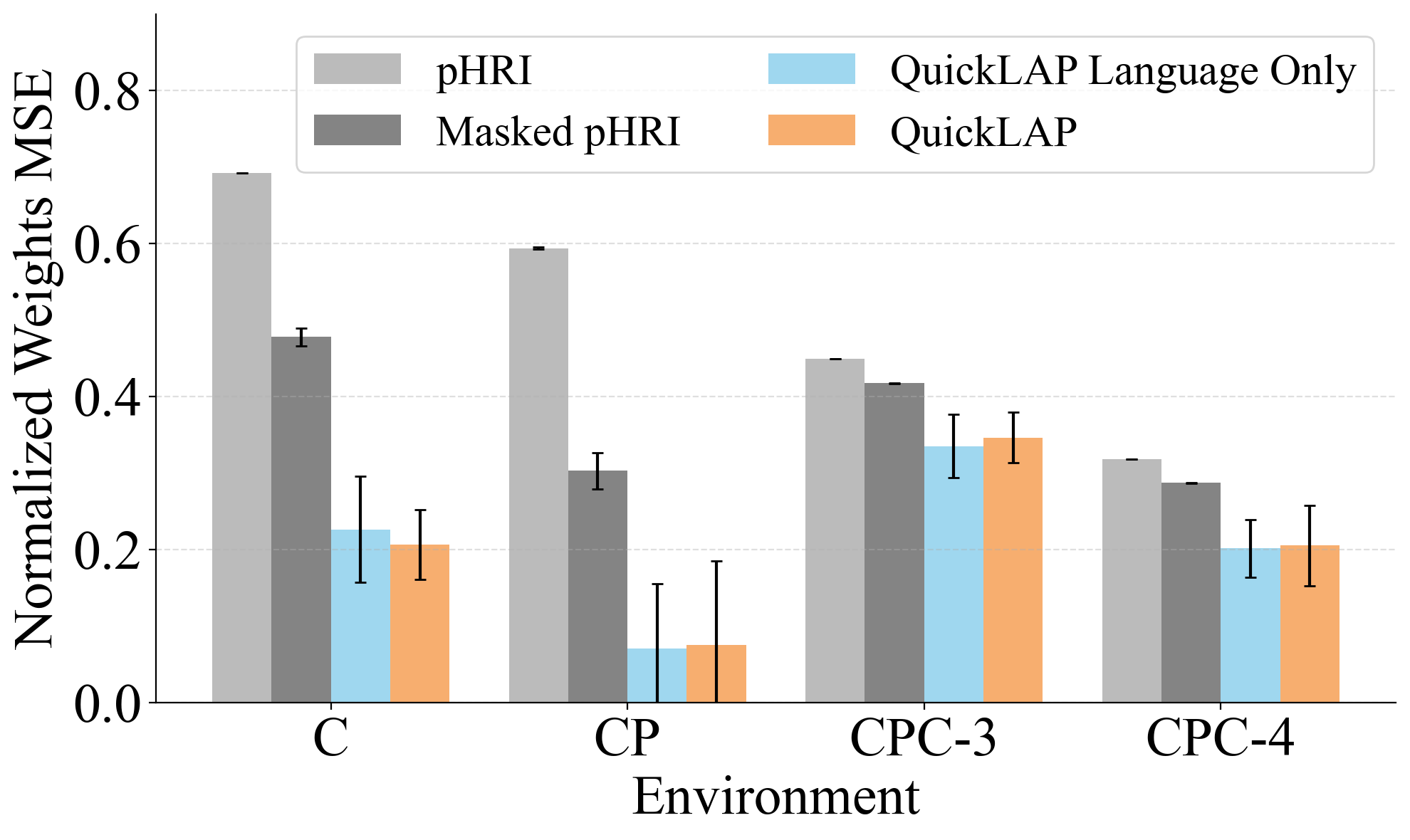
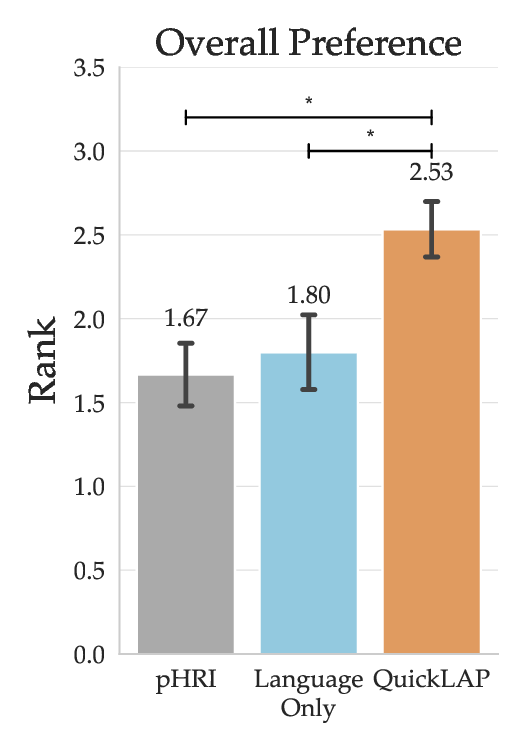
로봇은 사람의 행동과 언어 양쪽 모두로부터 학습해야 하지만, 각각의 모달리티만으로는 충분하지 않다. 물리적 교정은 실제 환경에 기반하지만 의도가 모호하고, 언어는 고수준 목표를 전달하지만 물리적 근거가 부족하다. 본 논문에서는 물리적 피드백과 언어 피드백을 실시간으로 융합해 보상 함수를 추정하는 베이지안 프레임워크인 QuickLAP(Quick Language‑Action Preference learning)을 제안한다. 핵심 아이디어는 언어를 사용자의 잠재적 선호에 대한 확률적 관측으로 취급함으로써, 어떤 보상 특징이 중요한지와 물리적 교정이 어떻게 해석되어야 하는지를 명확히 하는 것이다. QuickLAP은 대형 언어 모델(LLM)을 활용해 자유형 발화로부터 보상 특징 주의 마스크와 선호 변화를 추출하고, 이를 물리적 피드백과 폐쇄형 업데이트 규칙으로 통합한다. 이를 통해 모호한 피드백에도 강인하고 빠른 실시간 보상 학습이 가능해진다. 반자율 주행 시뮬레이터 실험에서 QuickLAP은 물리적 피드백만 사용하거나 기존 휴리스틱 다중모달 기법을 적용한 경우에 비해 보상 학습 오류를 70 % 이상 감소시켰다. 15명의 참가자를 대상으로 한 사용자 연구에서도 참가자들은 QuickLAP이 더 이해하기 쉽고 협업적이라고 평가했으며, 학습된 행동이 다른 방법보다 선호되었다. 코드와 데이터는 https://github.com/MIT-CLEAR-Lab/QuickLAP 에서 공개한다.💡 논문 핵심 해설 (Deep Analysis)
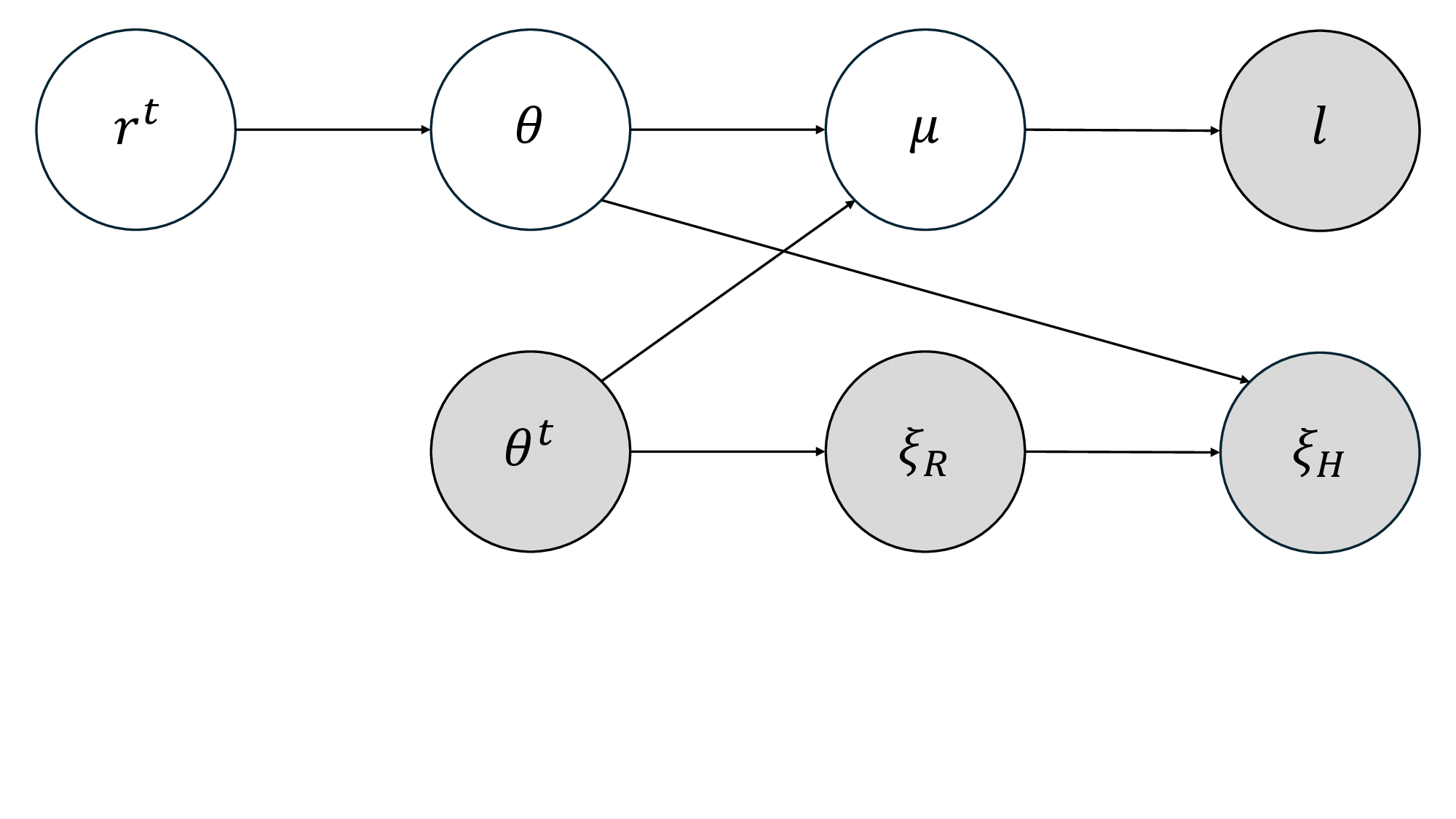
QuickLAP은 이러한 한계를 베이지안 관점에서 재구성한다. 사용자의 잠재 선호를 숨은 변수로 두고, 물리적 교정은 ‘행동 공간에서의 샘플’로, 언어는 ‘선호에 대한 확률적 관측’으로 모델링한다. 특히, 대형 언어 모델(LLM)을 이용해 자유형 텍스트에서 ‘보상 특징 주의 마스크’를 자동으로 추출한다는 점이 혁신적이다. 이는 기존에 사람이 직접 설계하거나 사전 정의된 키워드에 의존하던 방법과 달리, 도메인에 구애받지 않는 일반화 가능성을 제공한다.
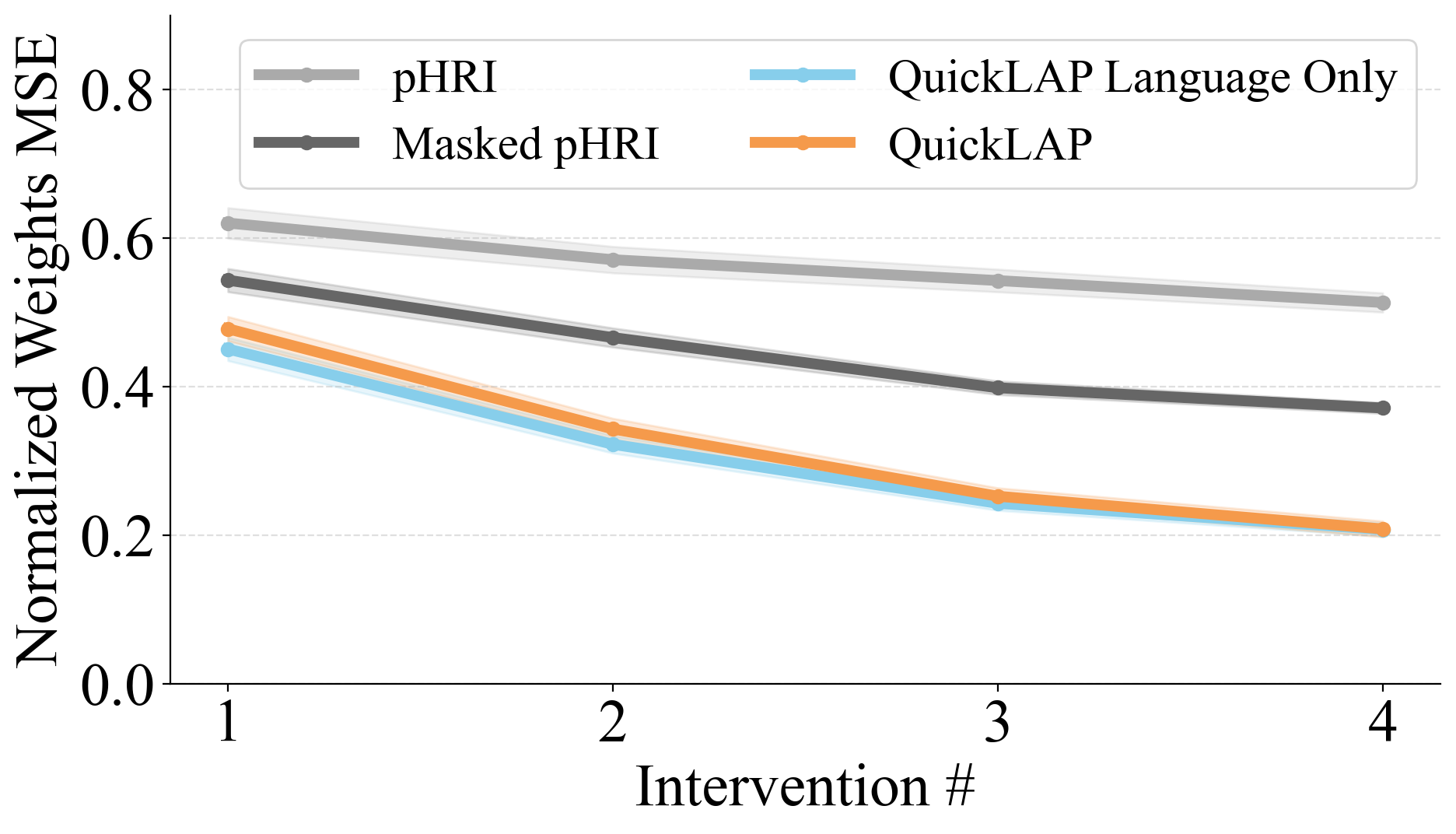
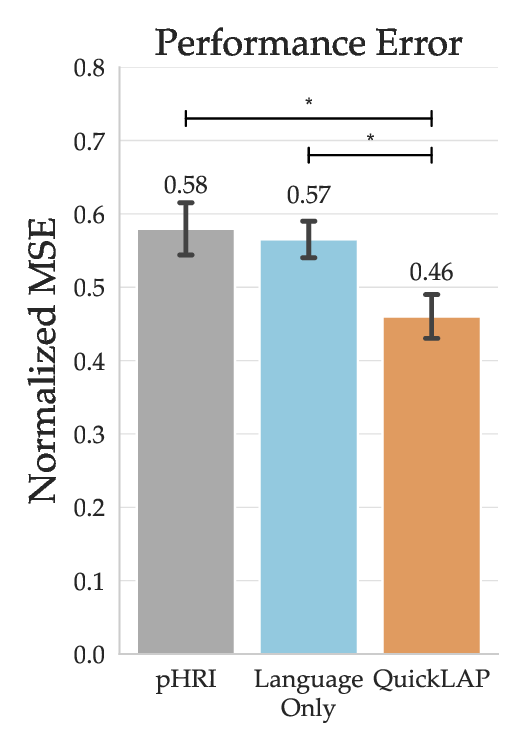
수학적으로는 사전 분포와 관측 모델을 결합한 폐쇄형 업데이트 식을 도출함으로써, 실시간으로 베이지안 사후를 계산한다. 이 과정은 연산량이 적어 로봇이 온라인으로 피드백을 받아 즉시 정책을 수정할 수 있게 한다. 실험에서는 반자율 주행 시뮬레이터를 이용해 물리적 교정만 사용하거나, 기존의 휴리스틱 다중모달 통합(예: 가중 평균)과 비교했을 때, 보상 함수 추정 오차가 70 % 이상 감소했음을 보고한다. 이는 특히 ‘언어가 모호할 때 물리적 교정이 보완하고, 물리적 교정이 불명확할 때 언어가 방향성을 제공한다’는 상호 보완 효과를 실증적으로 입증한다.
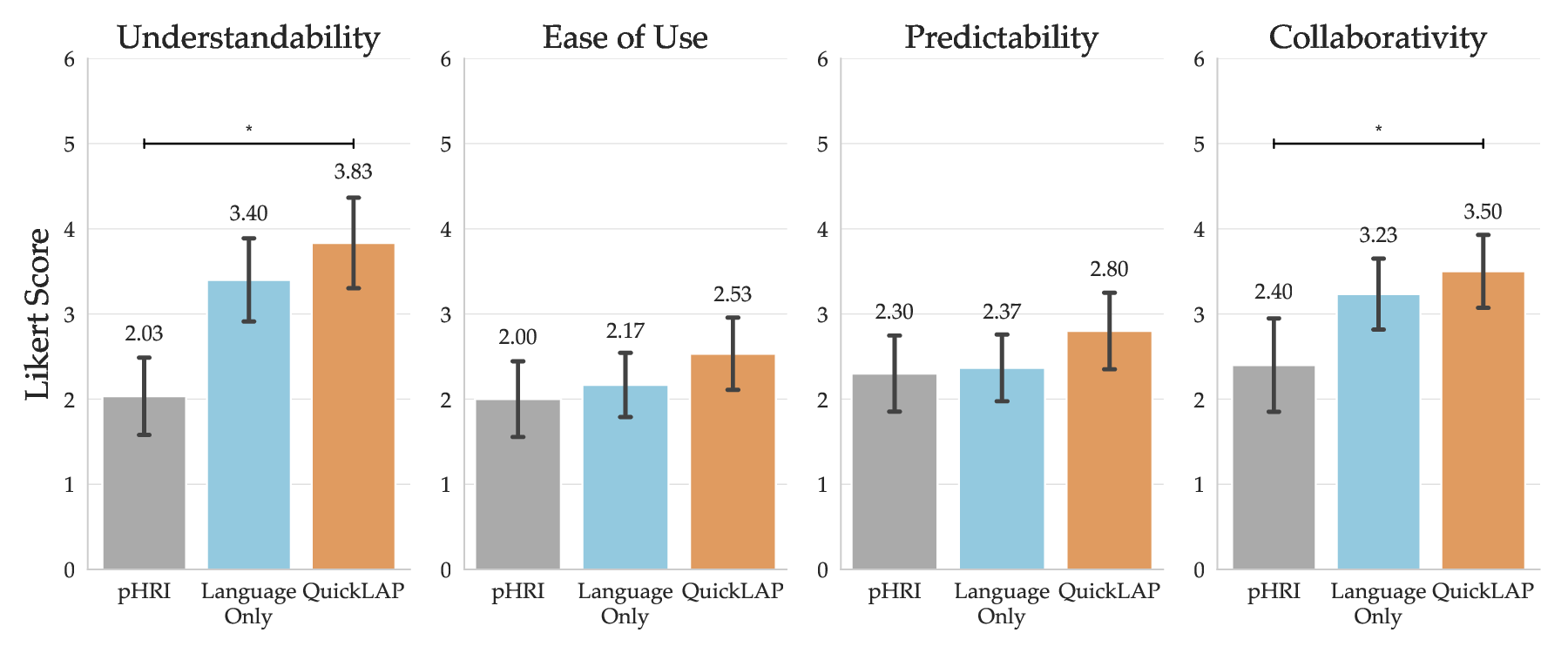
사용자 연구(15명)에서도 긍정적인 결과가 나타났다. 참가자들은 QuickLAP이 제공하는 피드백 해석 과정이 직관적이며, 로봇의 행동이 자신의 의도와 일치한다고 느꼈다. 이는 인간‑로봇 협업에서 신뢰와 투명성을 높이는 중요한 요소다.
하지만 몇 가지 한계도 존재한다. 첫째, LLM 기반 특징 추출은 프롬프트 설계와 모델 선택에 민감하며, 잘못된 마스크가 생성될 경우 보상 추정이 크게 왜곡될 수 있다. 둘째, 현재 실험은 시뮬레이션 환경에 국한되어 있어 실제 물리 로봇에서의 센서 노이즈, 지연, 안전 제약 등을 고려한 검증이 필요하다. 셋째, 베이지안 업데이트가 폐쇄형이라고는 하나, 고차원 보상 특징 공간에서는 근사화가 필요할 수 있다.
향후 연구 방향으로는 (1) LLM 프롬프트 자동 최적화 및 모델 경량화를 통해 실시간 적용성을 강화하고, (2) 실제 로봇 플랫폼에서의 장기 학습 및 안전 검증을 수행하며, (3) 사용자 개인별 선호 모델링을 도입해 맞춤형 피드백 해석을 구현하는 것이 제시된다. 전반적으로 QuickLAP은 다중모달 피드백을 정량화하고 통합하는 새로운 패러다임을 제시하며, 인간‑로봇 협업 시스템의 실용성을 크게 향상시킬 잠재력을 가진다.
📄 논문 본문 발췌 (Excerpt)
📸 추가 이미지 갤러리