보행 그래프 최적화 하지 재활 외골격 로봇을 위한 기반 보행에서 변화하는 보행 생성하기
📝 원문 정보
- Title: Gait Graph Optimization Generate Variable Gaits from One Base Gait for Lower-limb Rehabilitation Exoskeleton Robots- ArXiv ID: 2001.00728
- 발행일: 2020-01-16
- 저자: Lei Zhang, Weihai Chen, Yuan Chai, Jianhua Wang, Jianbin Zhang
📝 초록
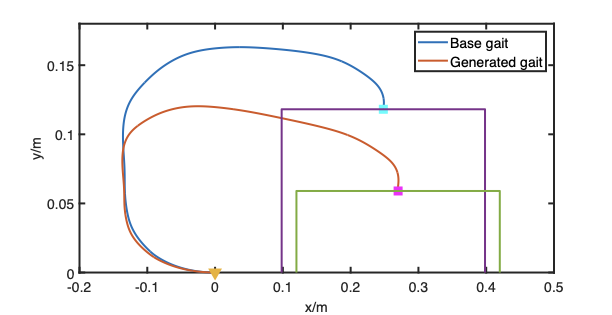
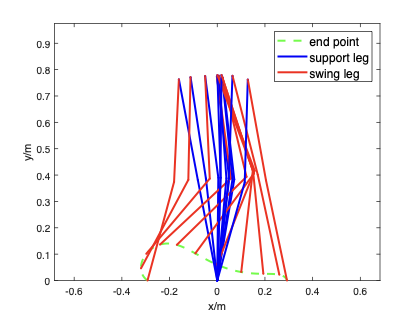
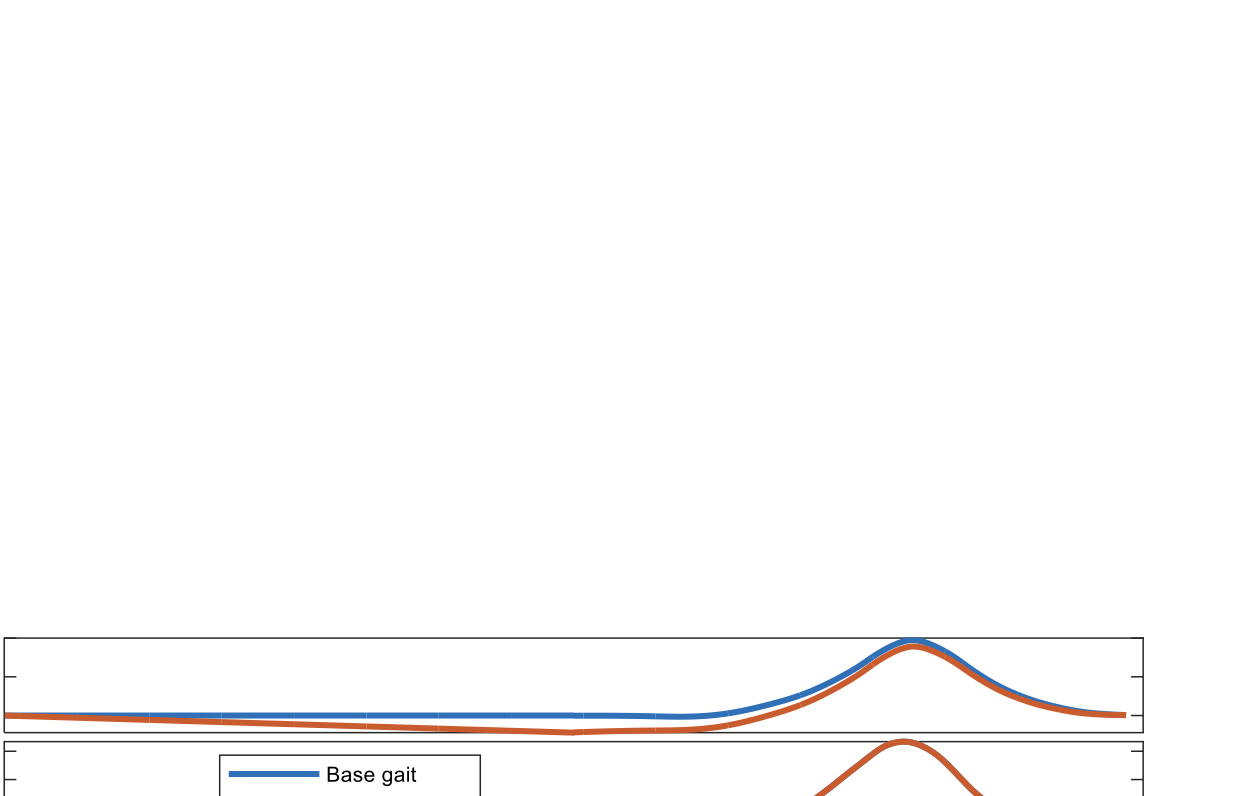
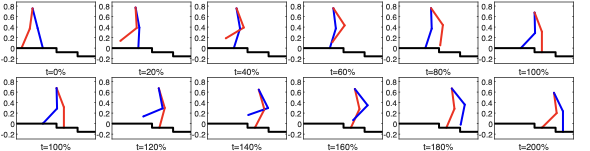
하지 재활 외골격(LLE) 로봇의 가장 집중적인 응용 분야는 장애인들이 "재걸음"을 할 수 있도록 돕는 것이다. 그러나 "걸음"은 평평한 지면에서 일정한 걸음을 걷는 것 이상이다. 본 논문은 복잡한 걷기 환경에 적응하기 위해 LLE 로봇의 다양한 걸음 생성에 초점을 맞추고 있다. 이전의 2족로봇을 위한 걸음 생성기와 달리, LLE를 위한 생성된 걸음은 환자들에게 편안해야 한다. SLAM에서 사용되는 포즈 그래프 최적화 알고리즘을 통해 본 논문에서는 한 건강한 개인으로부터 수집된 기준 걸음을 바탕으로 다양한, 기능적인 그리고 편안한 걸음을 생성하기 위한 그래프 기반의 걸음 생성 알고리즘인 걸음 그래프 최적화(GGO)를 제안한다. 걸음 조정, 장애물 회피, 계단 오르내림과 같은 걷기 문제의 변형을 통해 시뮬레이션 및 실험에서 제안된 접근법이 검증된다. 우리의 구현은 오픈 소스로 공개되었다.💡 논문 해설
**핵심 요약**: 본 논문은 복잡한 환경에 적응하는 다양한 걸음을 생성하기 위한 하지 재활 외골격 로봇의 새로운 접근법을 제시하고 있다. 이 방법은 건강한 사람으로부터 수집된 기준 걸음에서 출발하여 편안하면서도 효율적인 걸음을 만들기 위해 그래프 최적화 알고리즘을 사용한다.문제 제기: 현재의 하지 재활 외골격 로봇은 단순히 평평한 지면에서 걷는 것에 집중되어 있다. 그러나 실제 생활에서는 다양한 환경과 장애물을 피해야 하는 복잡한 걸음이 필요하다. 이러한 복잡한 환경에 적응하는 걸음을 생성할 수 있는 알고리즘이 요구된다.
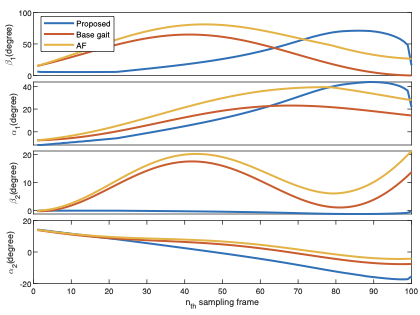
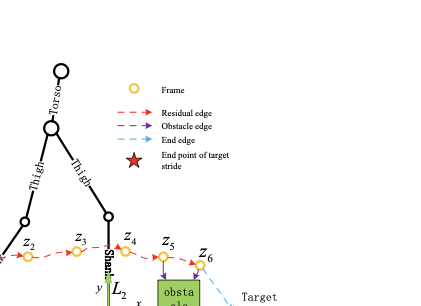
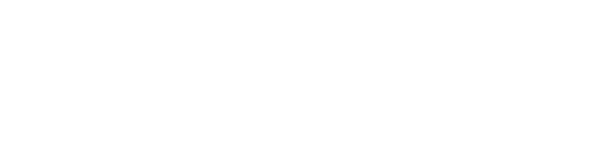
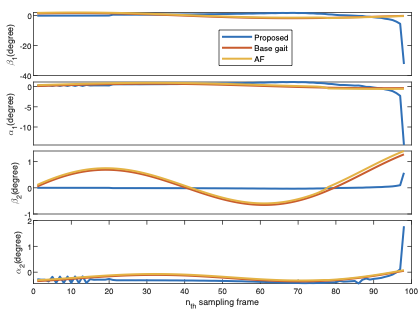
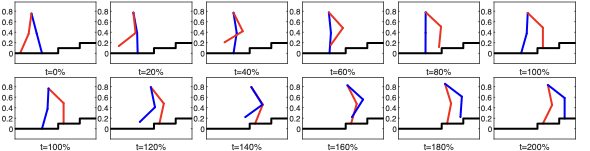
해결 방안 (핵심 기술): 제안된 접근법은 그래프 최적화를 통해 한 가지 기준 걸음에서 다양한 걸음을 생성한다. 이 방법은 SLAM(Simultaneous Localization and Mapping)에서 사용되는 포즈 그래프 최적화 알고리즘을 바탕으로 하며, 이를 통해 환자에게 편안하면서도 효율적인 걸음을 제공할 수 있다.
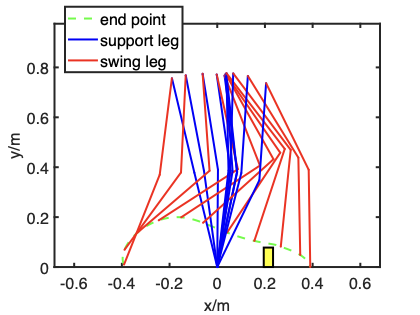
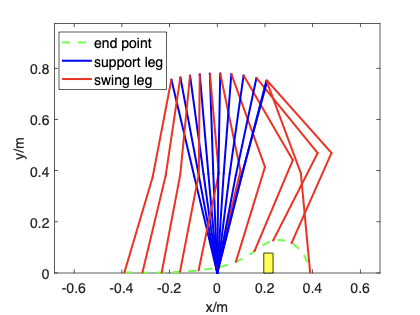
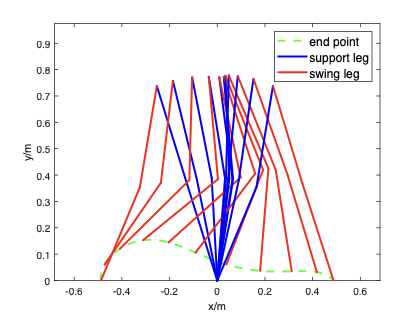
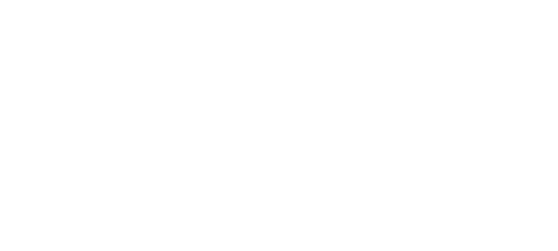
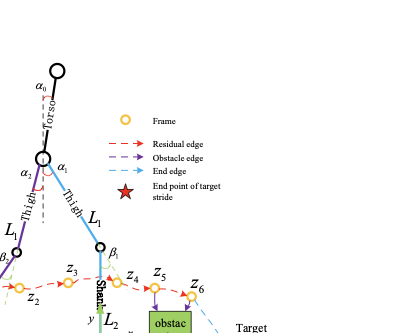
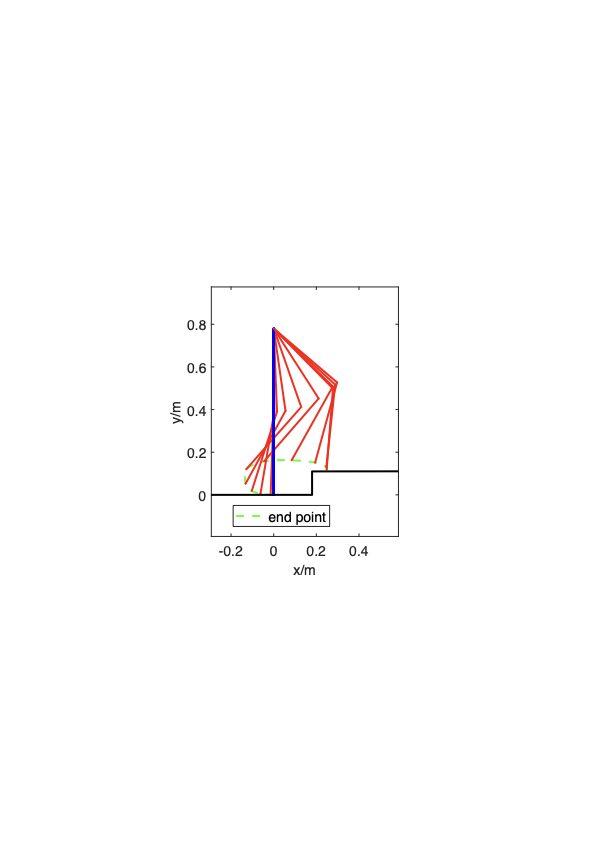
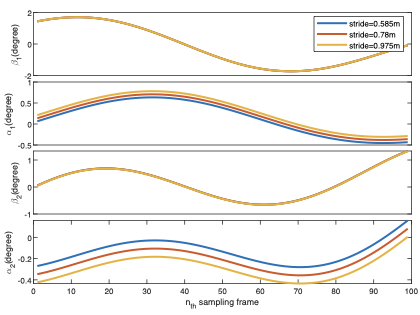
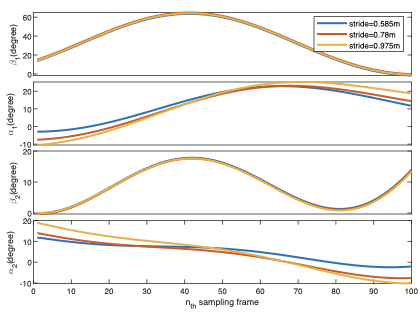
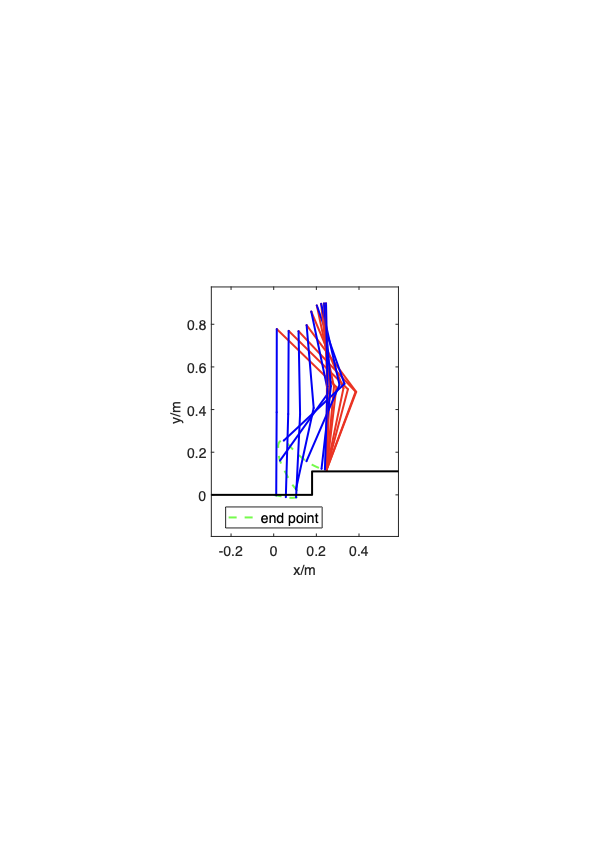
주요 성과: 시뮬레이션 및 실험을 통해 제안된 방법의 효과를 검증하였다. 특히, 걸음 조정, 장애물 회피, 계단 오르내림 등 다양한 환경에 대한 테스트에서 좋은 결과를 보였다.
의의 및 활용: 본 논문의 방법은 하지 재활 외골격 로봇이 복잡한 환경에서도 효과적으로 작동할 수 있도록 해주며, 이로 인해 장애인들이 좀 더 자유롭게 걸을 수 있게 된다. 이러한 기술은 향후 재활 의학 분야에서 중요한 발전을 가져올 것으로 보인다.
📄 논문 발췌 (ArXiv Source)
📊 논문 시각자료 (Figures)