로봇 시스템에서 Painlevé 모순 제어
📝 원문 정보
- Title: Control of Painlev e Paradox in a Robotic System- ArXiv ID: 1907.04070
- 발행일: 2019-07-10
- 저자: Davide Marchese, Marco Coraggio, S. John Hogan, Mario di Bernardo
📝 초록
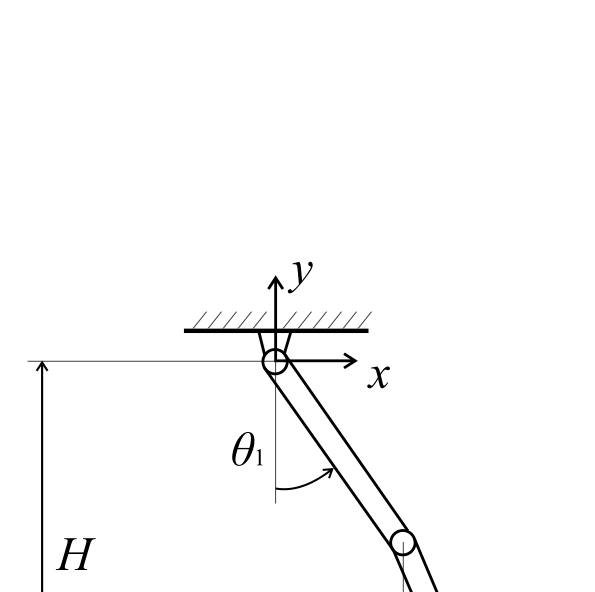
The Painlev\'e paradox is a phenomenon that causes instability in mechanical systems subjects to unilateral constraints. While earlier studies were mostly focused on abstract theoretical settings, recent work confirmed the occurrence of the paradox in realistic set-ups. In this paper, we investigate the dynamics and presence of the Painlev\'e phenomenon in a twolinks robot in contact with a moving belt, through a bifurcation study. Then, we use the results of this analysis to inform the design of control strategies able to keep the robot sliding on the belt and avoid the onset of undesired lift-off. To this aim, through numerical simulations, we synthesise and compare a PID strategy and a hybrid force/motion control scheme, finding that the latter is able to guarantee better performance and avoid the onset of bouncing motion due to the Painlev\'e phenomenon.💡 논문 해설
**핵심 요약**: 이 논문은 로봇 시스템에서 발생하는 Painlevé 패러독스를 제어하고 해결하기 위한 방법론을 연구합니다. 특히, 두 개의 링크로 구성된 로봇이 움직이는 벨트와 접촉할 때 이 현상의 역학과 존재 여부를 분석하며, 이를 통해 안정적인 미끄럼 운동을 유지하는 제어 전략을 개발했습니다.문제 제기: Painlevé 패러독스는 로봇이 움직이는 벨트와 접촉할 때 발생하는 불안정성으로, 이로 인해 로봇의 원활한 작동이 방해받을 수 있습니다. 이를 해결하지 못하면 로봇은 예상치 않은 상승이나 튀어오름 현상을 겪게 되며, 이는 작업 효율성을 저하시킵니다.
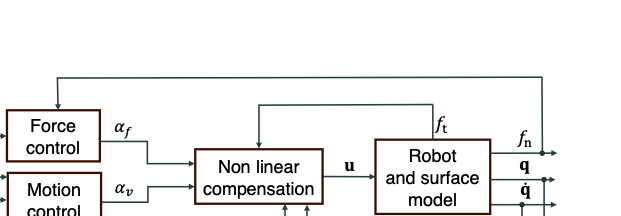
해결 방안 (핵심 기술): 연구진들은 로봇의 동작을 분석하기 위해 수학적 모델링과 분기 분석을 수행했습니다. 이를 통해 PID 제어와 하이브리드 힘/모션 제어 전략을 개발하고, 이들 방법론의 성능을 비교하였습니다. 특히, 하이브리드 제어 기법은 로봇이 벨트 위에서 안정적으로 미끄러지게 하고, Painlevé 현상으로 인한 부정적인 움직임을 방지할 수 있음을 확인했습니다.
주요 성과: PID 제어 전략과 하이브리드 힘/모션 제어 전략을 비교한 결과, 하이브리드 방법론이 더 나은 성능을 보여주고, Painlevé 현상으로 인한 튀어오름 현상을 방지하는데 효과적임을 발견하였습니다.
의의 및 활용: 이 연구는 로봇 공학에서 중요한 문제를 해결하는 데 기여하며, 특히 움직이는 표면 위에서 안정적인 운동이 요구되는 산업 분야에 적용할 수 있습니다. 이를 통해 작업 효율성을 향상시키고, 장비의 내구성과 신뢰도를 증가시킬 수 있습니다.
📄 논문 발췌 (ArXiv Source)
📊 논문 시각자료 (Figures)