최근에 무인항공기(UAV)를 시민용으로 사용하는 것에 대한 관심이 매우 높아지고 있습니다. 이 결과, 수천 대의 UAV가 동시에 날아다닐 때 안전성과 목표 달성을 보장하기 위해 무인 항공 체계 교통 관리가 필요하게 되었습니다. 현재로서는 에이전트들의 행동 세트가 제한되지 않은 경우, 큰 다중 에이전트 시스템의 분석은 이러한 보장을 제공할 수 없습니다. 본 논문에서는 공중 고속도로 위를 날아가는 UAV 플라톤을 제안하여 분석이 가능하도록 하늘 구조를 구성합니다. 공중 고속도로 배치 문제에 대해 빠른 행진 방법(Fast Marching Method)을 사용하여 원점에서 목적지까지의 비행 비용을 최소화하는 공중 고속도로 시퀀스가 생성됩니다. 공중 고속도로의 배치는 실시간으로 갑작스러운 상공 변화를 수용할 수 있도록 업데이트될 수 있습니다. 공중 고속도로를 이용하여 이동하는 플라톤 내에서 각 항공기는 하이브리드 시스템으로 모델링됩니다. 해밀턴-야코비 도달성(Hamilton-Jacobi Reachability)을 사용하여 모든 상태 전환에 대한 안전성과 목표 달성이 보장됩니다. 단일 고도 범위에서 제안된 접근법은 항공기당 1회의 안전 침해를 보장하며, 다중 안전 침해가 발생할 경우 여러 고도 범위에서의 안전성을 보장합니다. 세 가지 대표적인 시나리오를 통해 플라톤 개념을 시뮬레이션으로 증명했습니다.
💡 논문 핵심 해설 (Deep Analysis)
This paper proposes a system for ensuring safety and goal satisfaction in unmanned aerial vehicle (UAV) operations, particularly when thousands of UAVs fly simultaneously. The core concept is to create platoons of UAVs flying on designated air highways. This structure simplifies the analysis and ensures that each UAV can be effectively managed and monitored. By using the Fast Marching Method for optimal placement of these air highways, the system can adapt in real-time to airspace changes. Each UAV within a platoon is modeled as a hybrid system, allowing safety guarantees through Hamilton-Jacobi reachability methods. The paper demonstrates this concept with simulations across three representative scenarios. This approach not only enhances safety but also improves efficiency and could be particularly useful for urban logistics and emergency response operations.
📄 논문 본문 발췌 (Translation)
본 논문에서는 무인항공기(UAV)의 안전한 비행과 목표 달성을 위해 공중 고속도로 위를 날아가는 플라톤을 제안합니다. 현재, 수천 대의 UAV가 동시에 비행하는 상황에서 각 항공기가 다양한 행동을 취할 경우 분석이 복잡해지며, 안전성과 목표 달성을 보장하기 어렵습니다. 본 논문에서는 이러한 문제를 해결하기 위해 공중 고속도로 위에 플라톤을 구성하여 분석이 가능하도록 하늘 구조를 제안합니다.
Methodology
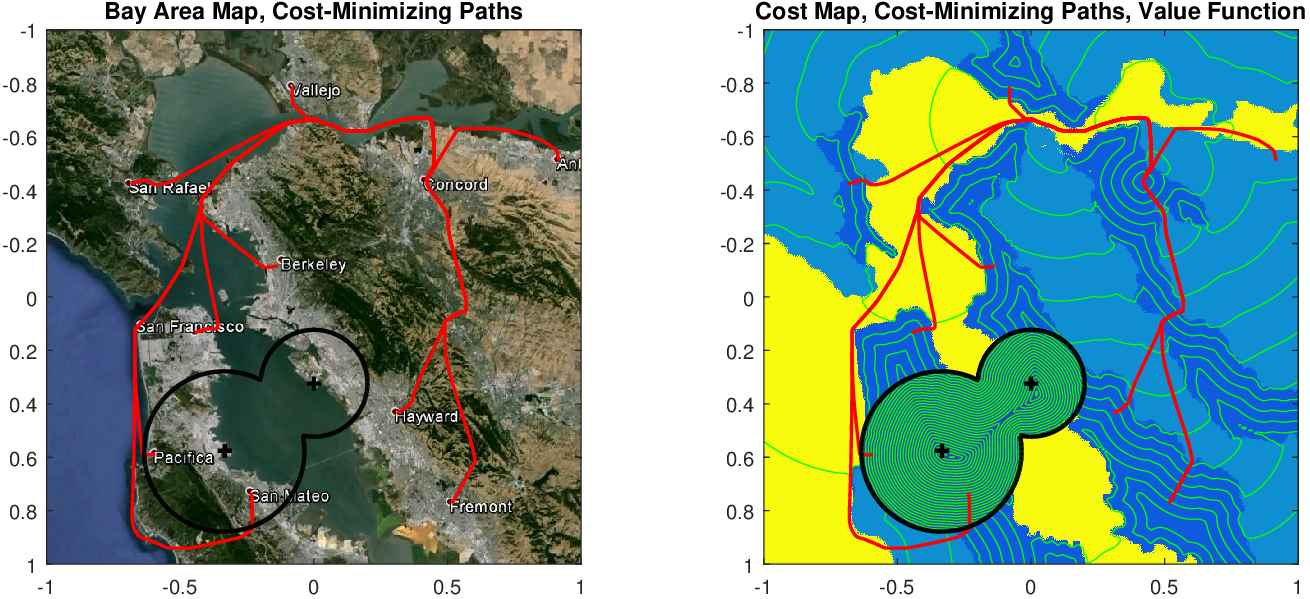
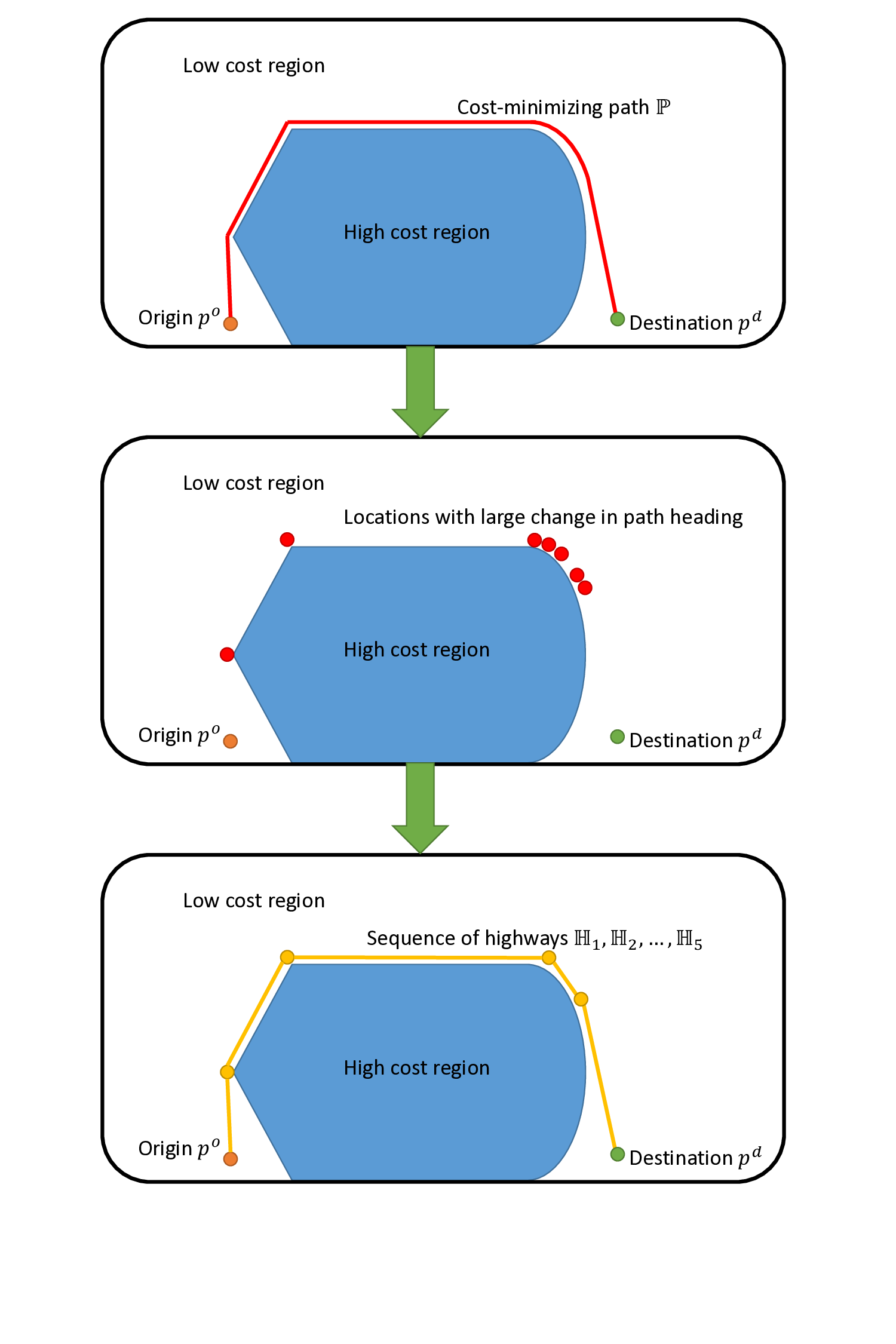
Fast Marching Method는 비행 경로의 최적화에 사용됩니다. 이 방법은 원점에서 목적지까지의 비행 비용을 최소화하는 공중 고속도로 시퀀스를 생성하는데 활용됩니다. 이를 통해 실시간으로 갑작스러운 상공 변화를 수용할 수 있습니다.
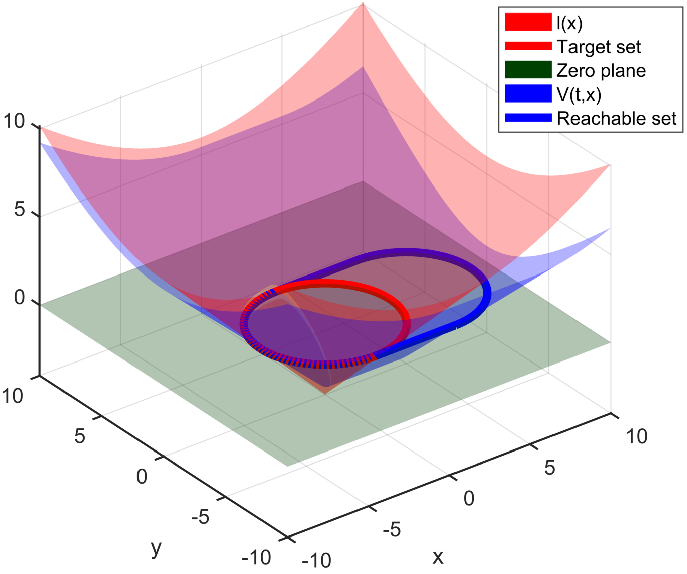
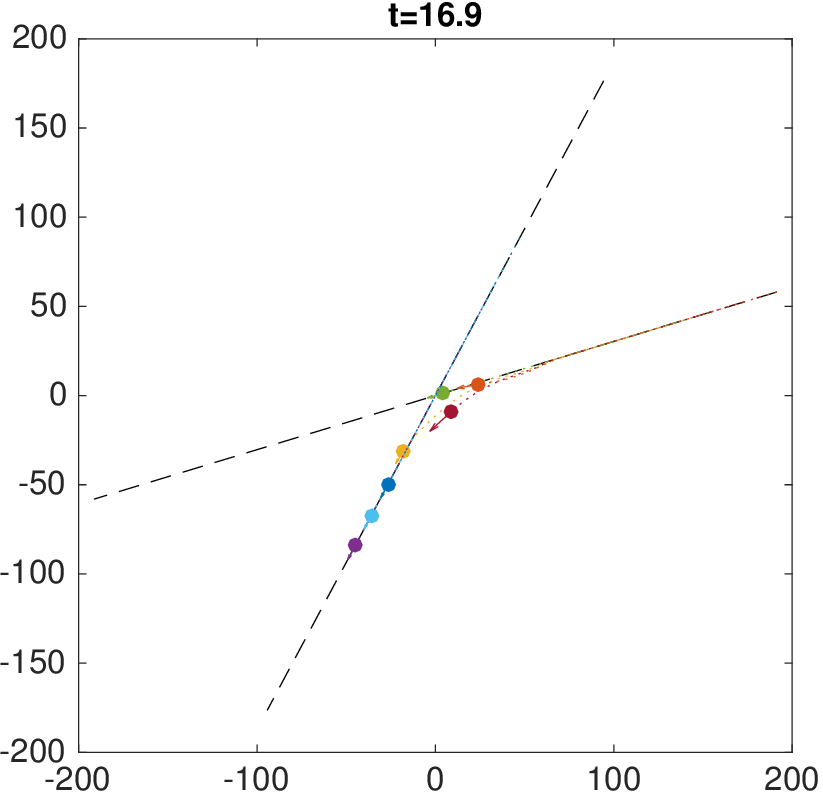
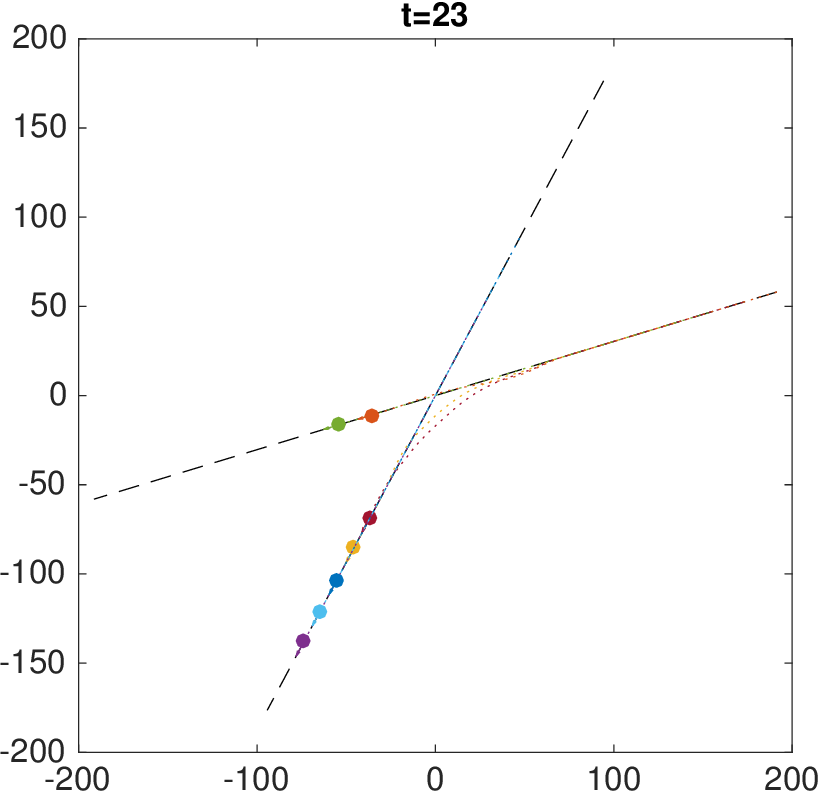
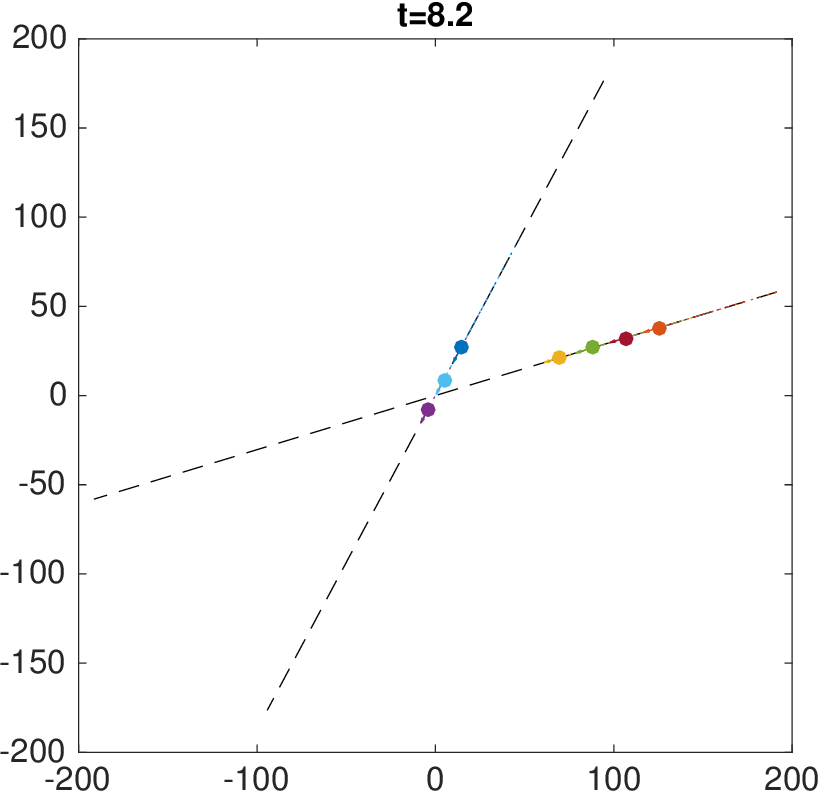
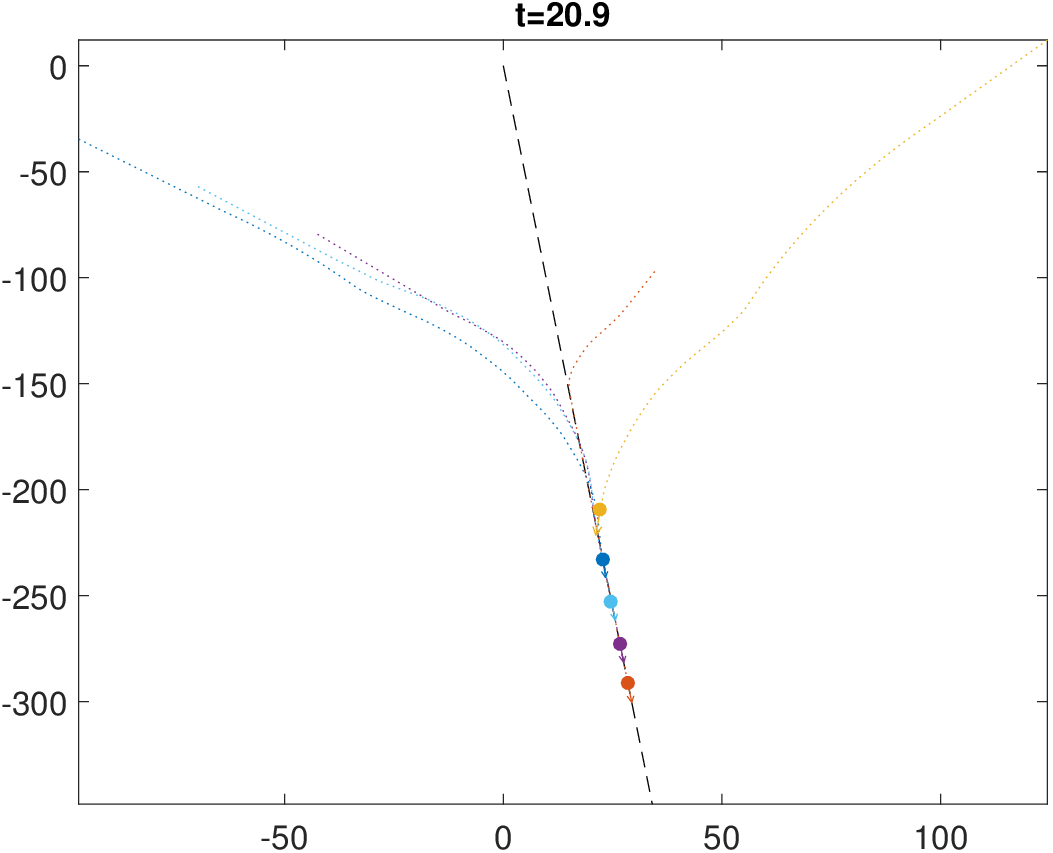
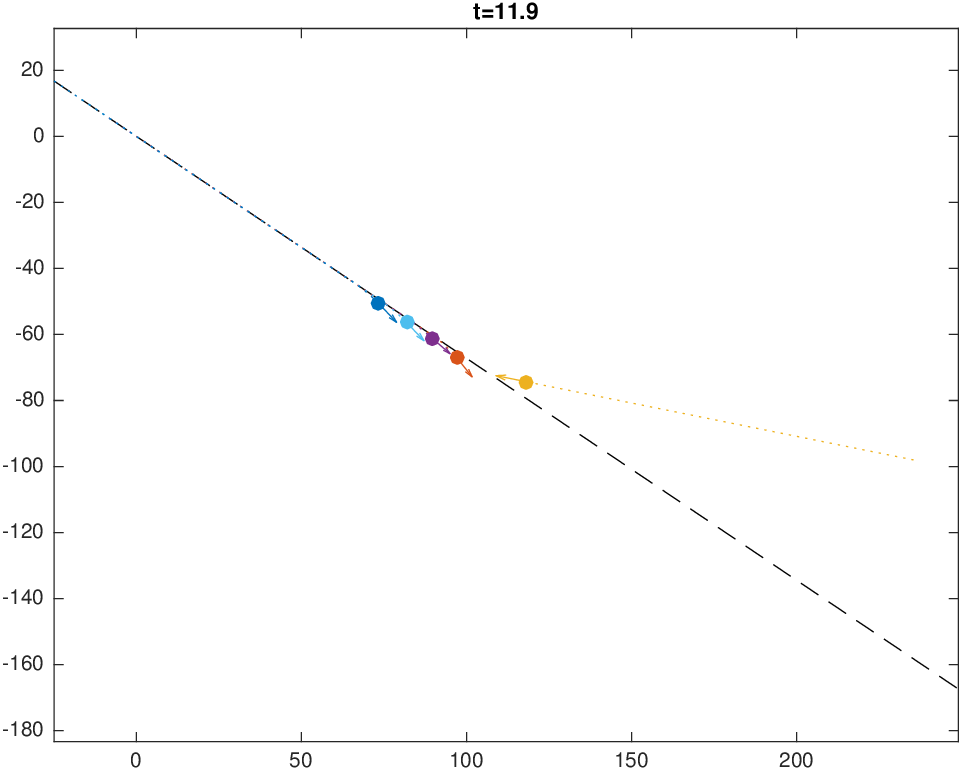
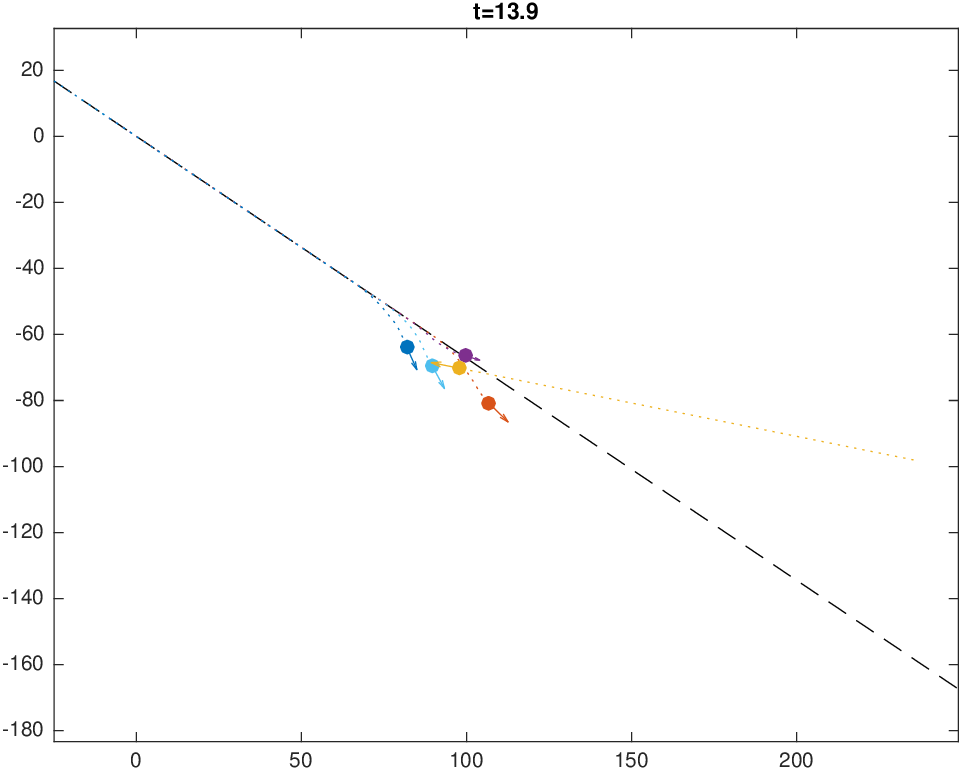
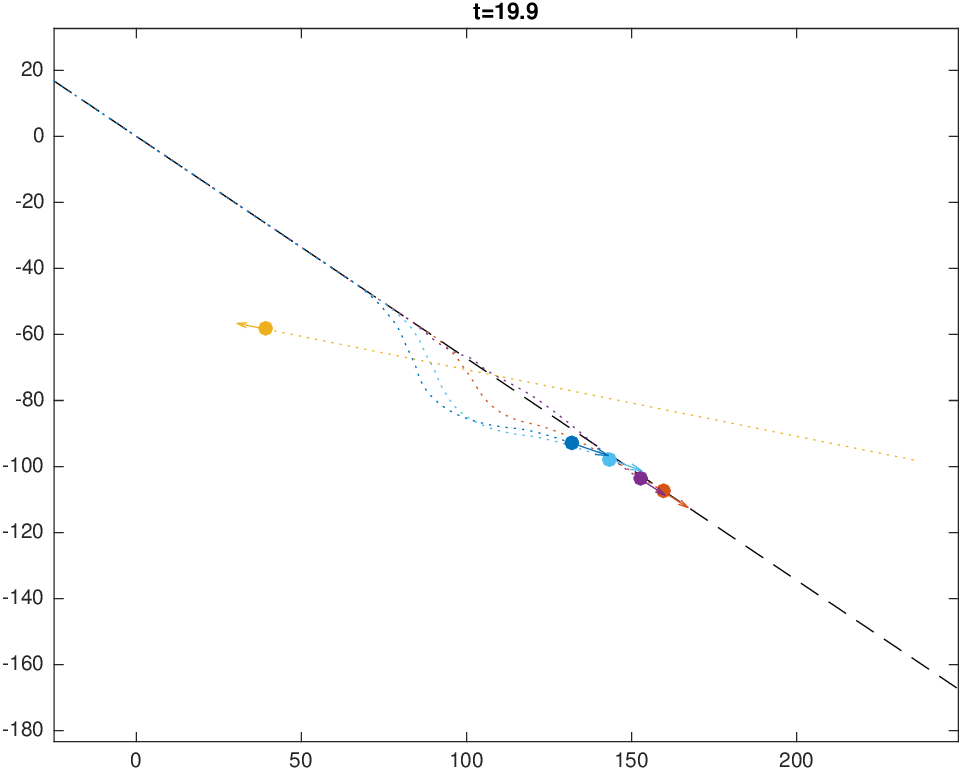
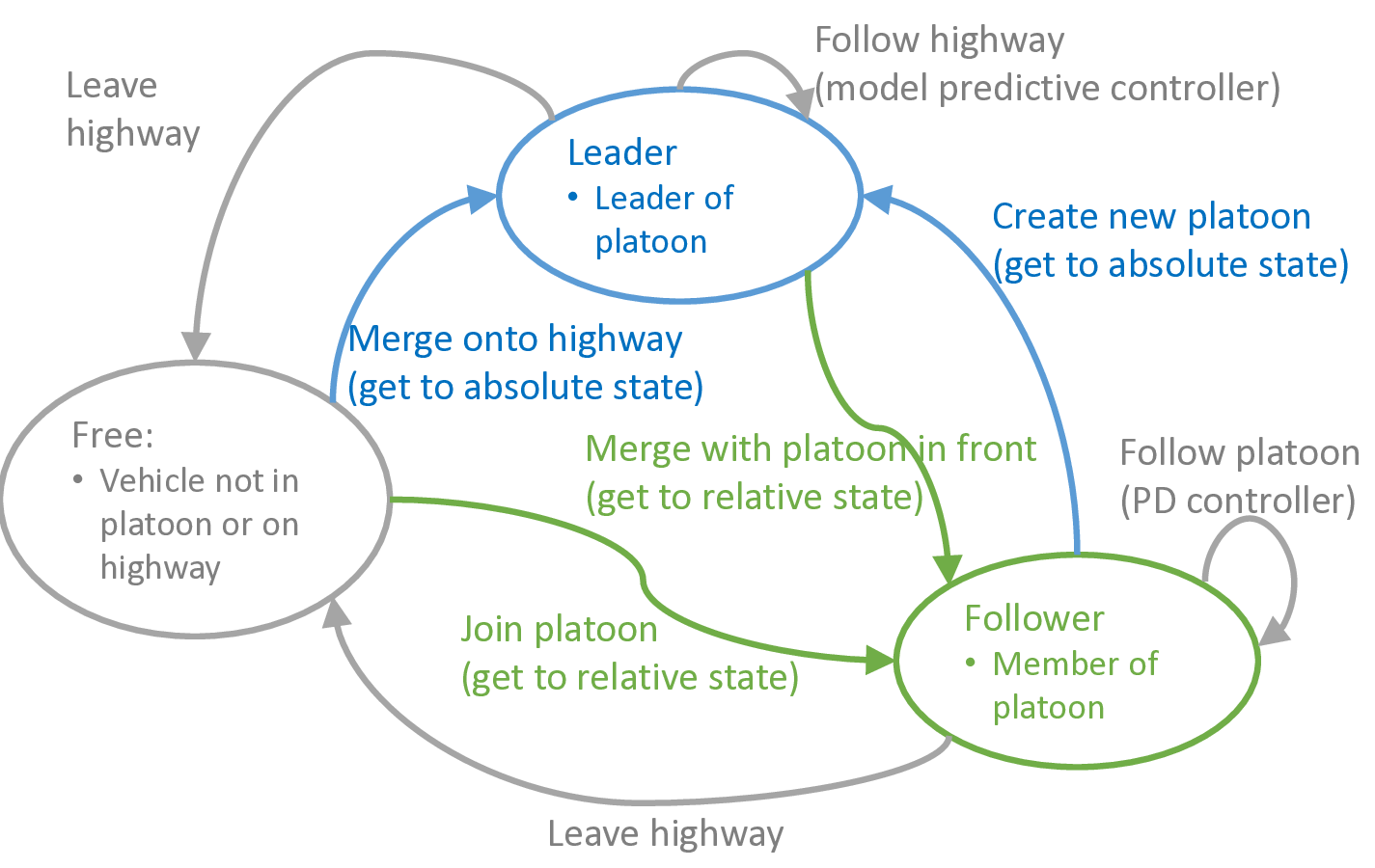
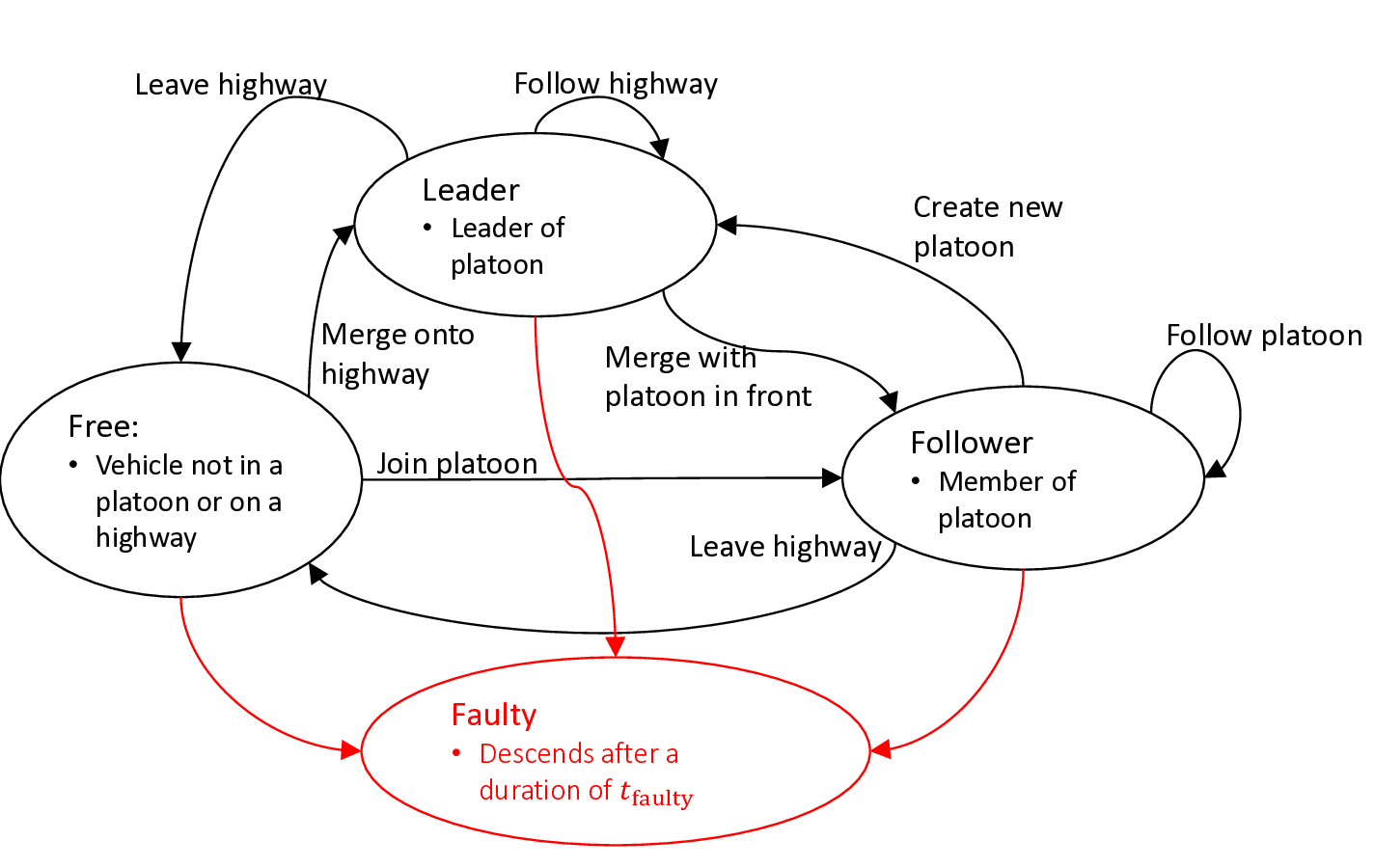
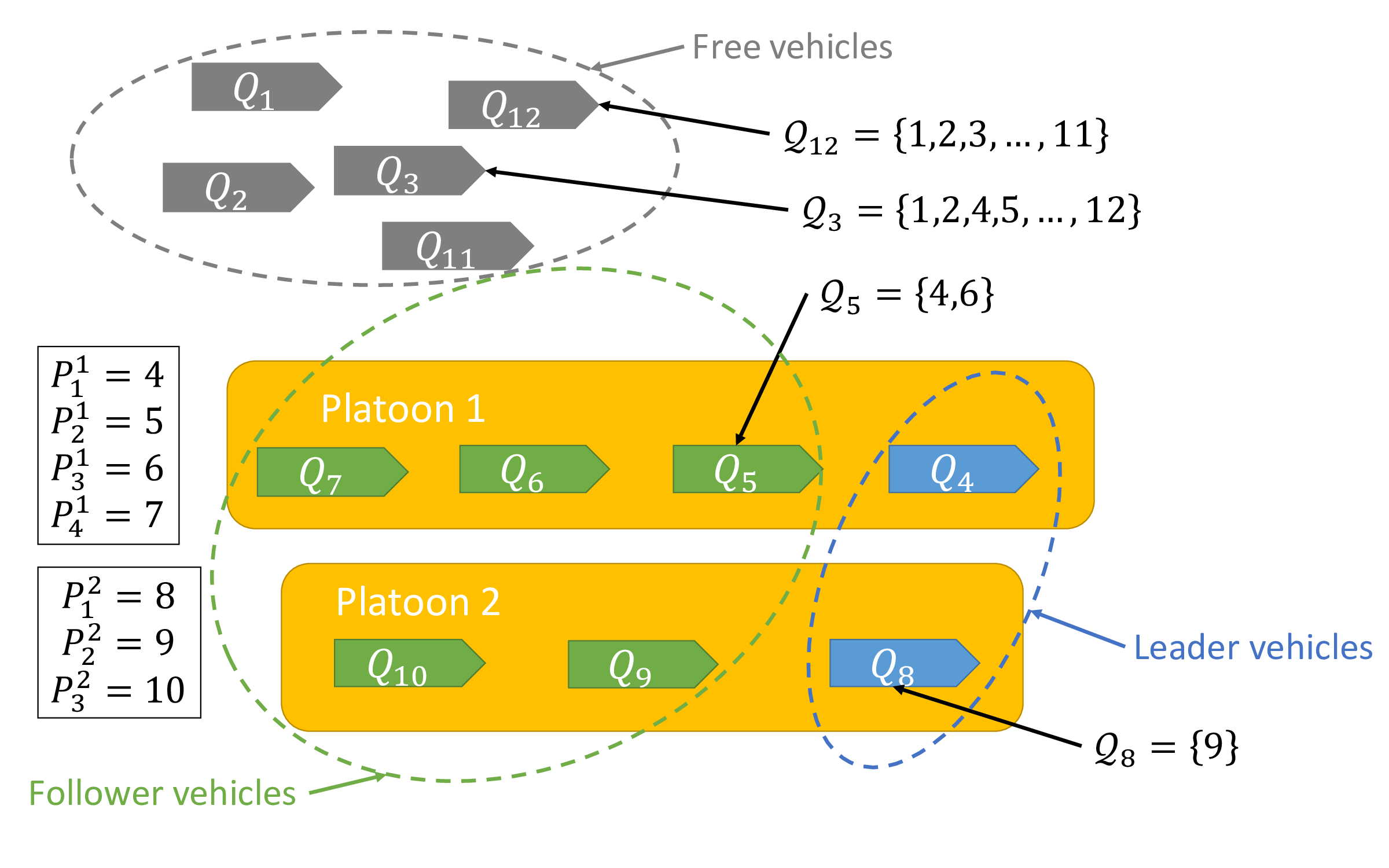
각 플라톤 내에서 항공기는 하이브리드 시스템으로 모델링됩니다. 해밀턴-야코비 도달성(Hamilton-Jacobi Reachability)을 사용하여 모든 상태 전환에 대한 안전성이 보장됩니다. 단일 고도 범위에서는 제안된 접근법이 항공기당 한 번의 안전 침해를 허용하며, 다중 안전 침해 시 여러 고도 범위에서 안전성을 유지할 수 있습니다.
[[IMG_PROTECT_1]]
[[IMG_PROTECT_2]]
Experiments
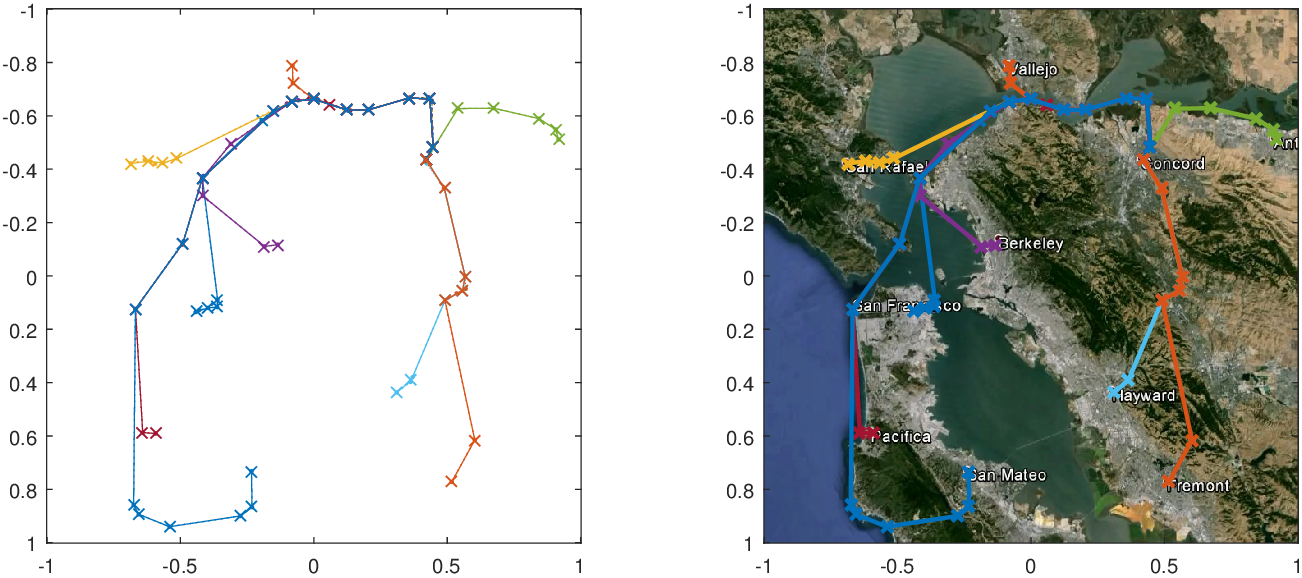
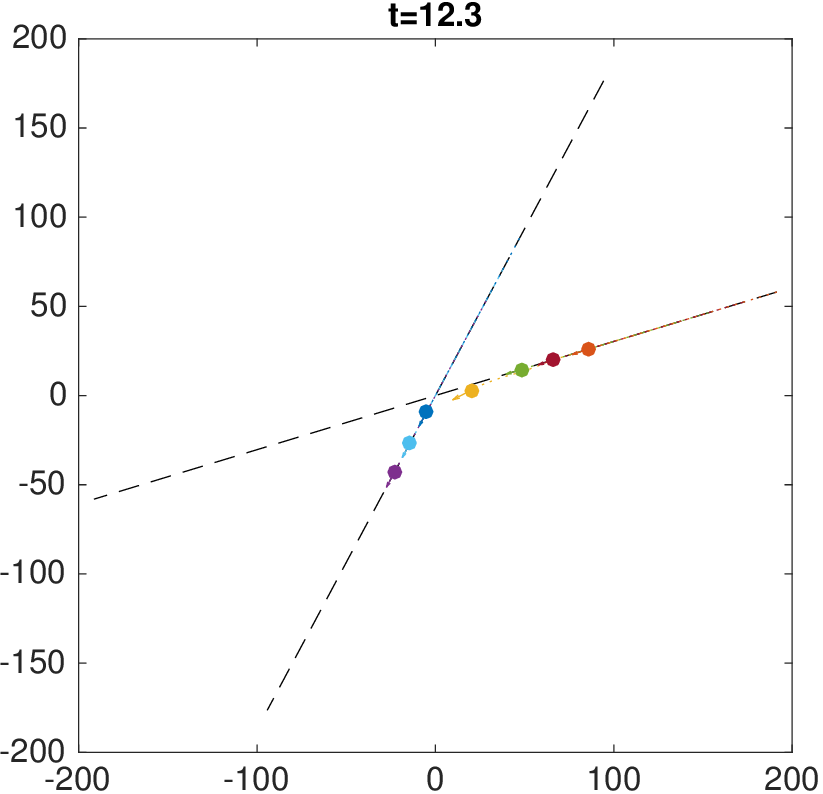
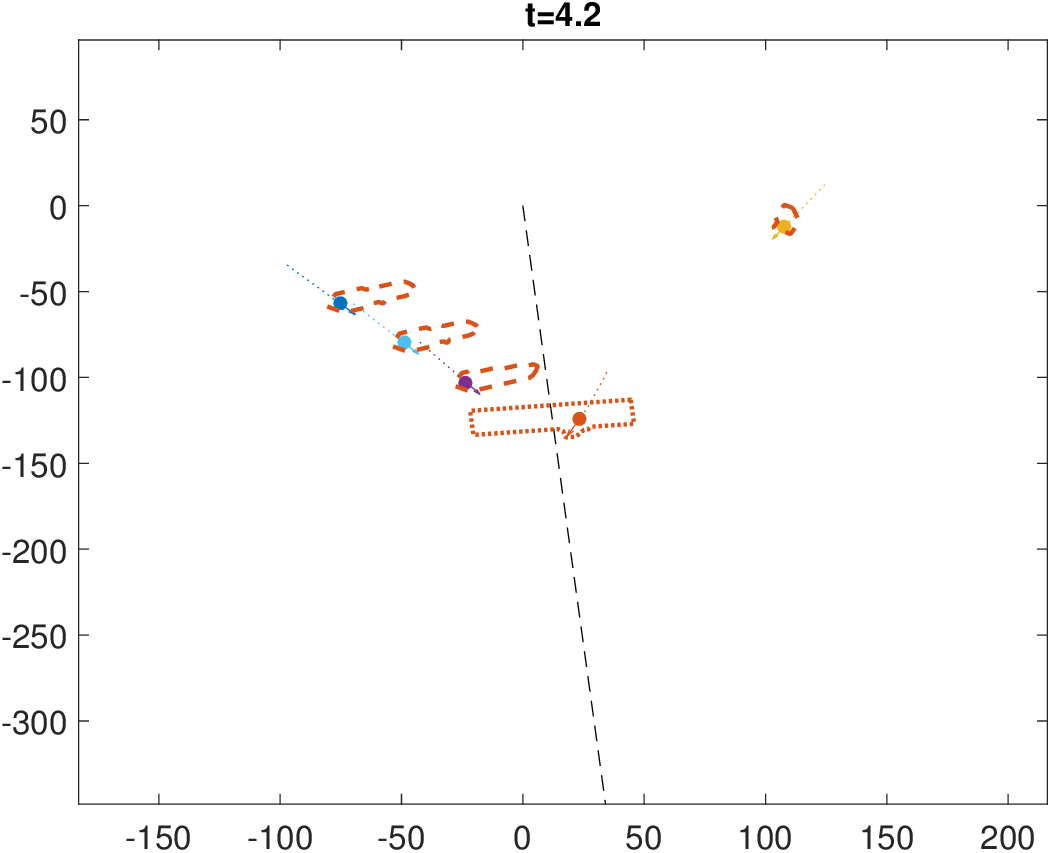
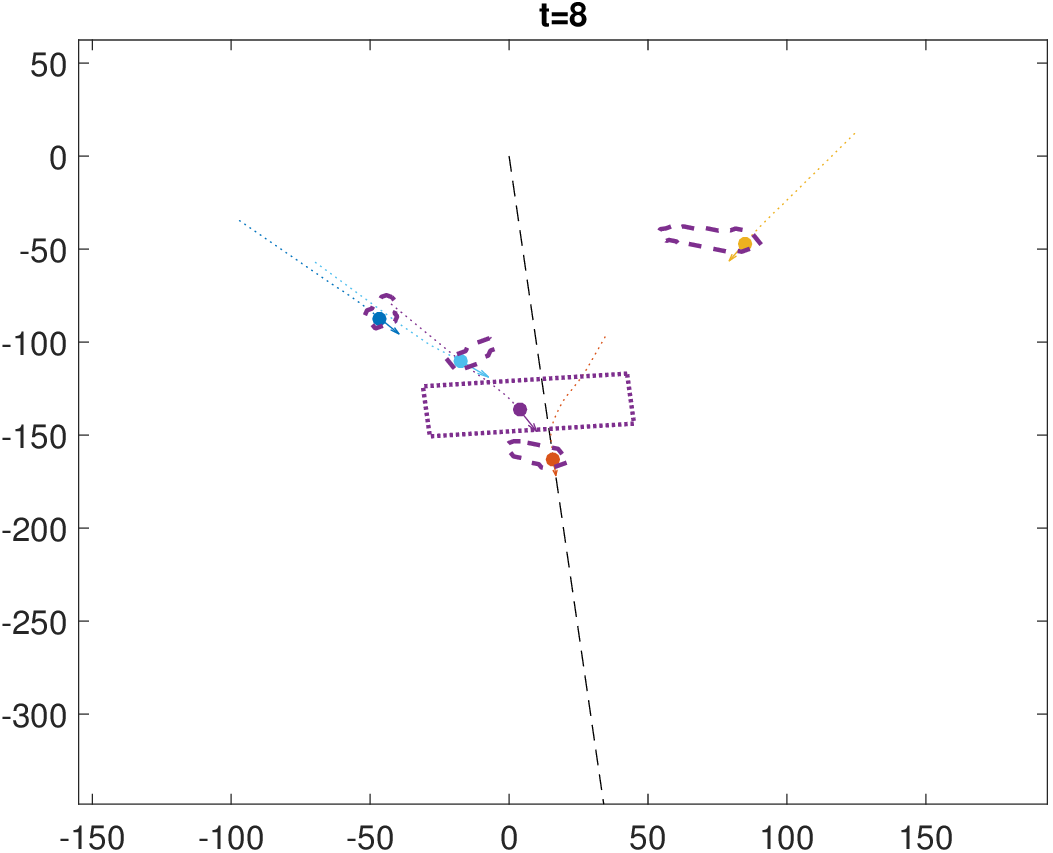
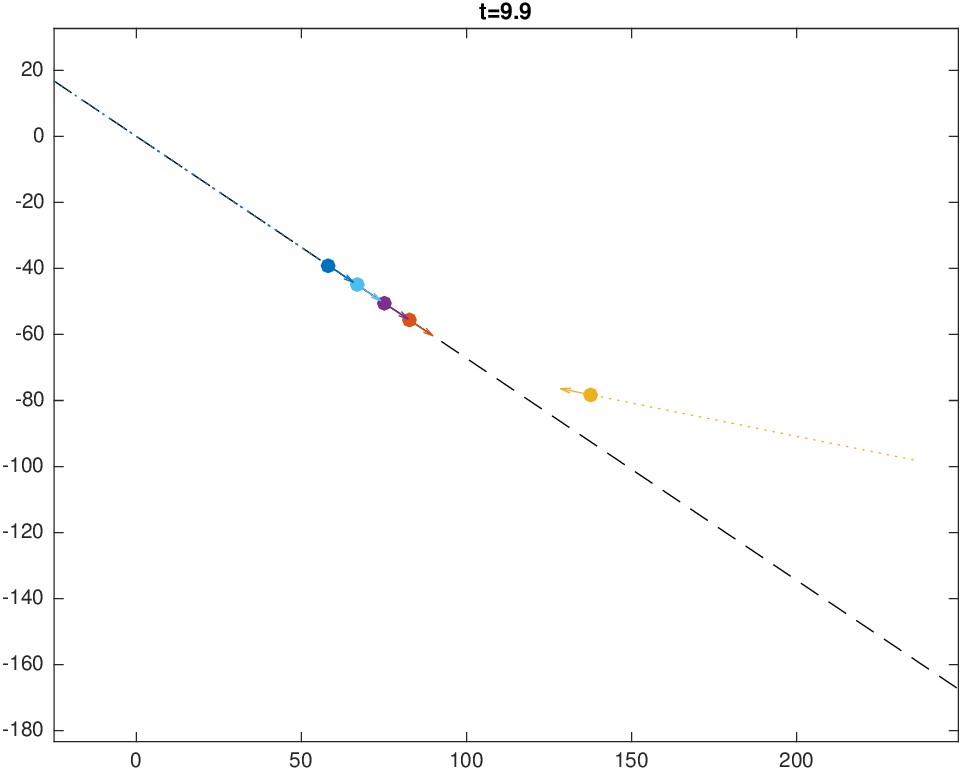
세 가지 대표적인 시나리오를 통해 플라톤 개념을 시뮬레이션으로 증명하였습니다. 첫 번째 시나리오는 간단한 두 항공기의 비행 경로 분석이며, 두 번째와 세 번째 시나리오는 더 복잡한 상황에서의 안전성과 효율성을 검증합니다.