피드백 선형화 가능한 시스템을 위한 암시적 트라젝토리 계획 시간 변동 최적화 접근법
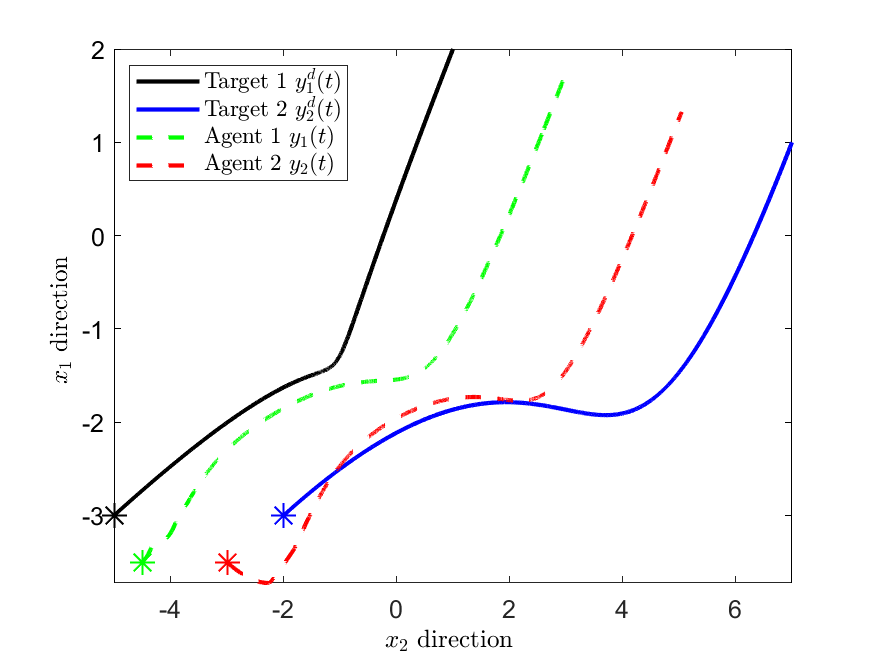
우리는 피드백 선형화 가능한 시스템의 실시간 경로 계획과 피드백 제어를 위한 최적화 기반 프레임워크를 개발했습니다. 이를 달성하기 위해, 목표 경로를 시간 변동 최적화 문제의 최적 해로 정의합니다. 그러나 일반적으로 이러한 경로는 비홀놈 제약 조건으로 인해 적절하지 않을 수 있습니다. 이 문제를 해결하기 위해, 목표 경로에 점근적으로 수렴하는 타당한 경로를 생성하는 제어 법칙을 설계했습니다. 구체적으로, 동적 전체 상태 선형화가 가능한 시스템의 경우, 제안된 제어 법칙은 비선형 시스템을 충분히 높은 차수의 최적화 알고리즘으로 암묵적으로 변환합니다. 우리는 최적화 알고리즘과 원래 시스템 모두에서 목표 경로에 대한 전역 지수 수렴성을 증명했습니다. 제약 조건이 있는 다중 대상 또는 다중 에이전트 추적 문제에서 우리의 방법의 효과를 설명합니다.
paper
AI 요약
![[한글 번역 중] Constraint programming model and biased random-key genetic algorithm for the single-machine coupled task scheduling problem with exact delays to minimize the makespan](https://koineu.com/posts/2025/12/2025-12-29-191019-constraint_programming_model_and_biased_random_key/ctsp-Flowchart-v7.drawio.png)