Integrated Shape-Force Estimation for Continuum Robots: A Virtual-Work and Polynomial-Curvature Framework
Cable-driven continuum robots (CDCRs) are widely used in surgical and inspection tasks that require dexterous manipulation in confined spaces. Existing model-based estimation methods either assume constant curvature or rely on geometry-space interpolants, both of which struggle with accuracy under large deformations and sparse sensing. This letter introduces an integrated shape-force estimation framework that combines cable-tension measurements with tip-pose data to reconstruct backbone shape and estimate external tip force simultaneously. The framework employs polynomial curvature kinematics (PCK) and a virtual-work-based static formulation expressed directly in curvature space, where polynomial modal coefficients serve as generalized coordinates. The proposed method is validated through Cosserat-rod-based simulations and hardware experiments on a torque-cell-enabled CDCR prototype. Results show that the second-order PCK model achieves superior shape and force accuracy, combining a lightweight shape optimization with a closed-form, iteration-free force estimation, offering a compact and robust alternative to prior constant-curvature and geometry-space approaches.
💡 Research Summary
This paper presents an integrated shape‑force estimation framework for cable‑driven continuum robots (CDCRs) that simultaneously reconstructs the backbone shape and estimates the external tip wrench using only sparse tip‑pose measurements and cable‑tension data. The authors identify two major shortcomings of existing approaches: (1) shape estimation methods that rely on constant‑curvature (CC) assumptions or geometry‑space interpolants (e.g., Bézier, B‑splines) cannot capture large, non‑uniform deformations, leading to significant shape drift; (2) force estimation methods that use actuator tensions are typically decoupled from shape estimation, so errors in the assumed shape propagate to the wrench estimate.
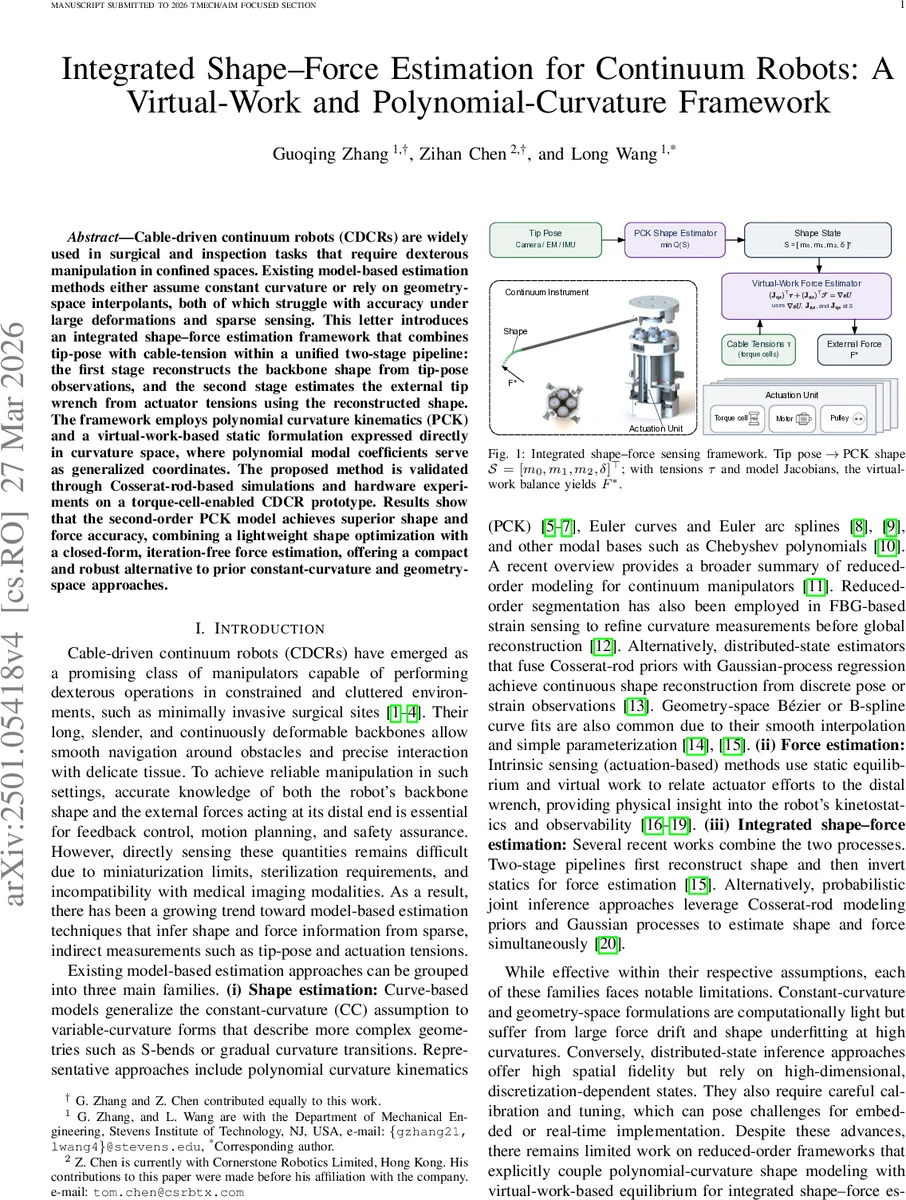
To address these issues, the authors propose a two‑stage pipeline that operates entirely in curvature space. In the first stage, the backbone curvature κ(s) is represented by a low‑order polynomial (PCK) model. Specifically, a second‑order polynomial κ(s)=m₀+m₁s+m₂s² is adopted, where the modal coefficients m₀, m₁, m₂ together with the global bending‑plane angle δ constitute the shape state vector S=
Comments & Academic Discussion
Loading comments...
Leave a Comment