Robot Arm Control via Cognitive Map Learners
Cognitive map learners (CML) have been shown to enable hierarchical, compositional machine learning. That is, interpedently trained CML modules can be arbitrarily composed together to solve more complex problems without task-specific retraining. This…
Authors: Nathan McDonald, Colyn Seeley, Christian Brazeau
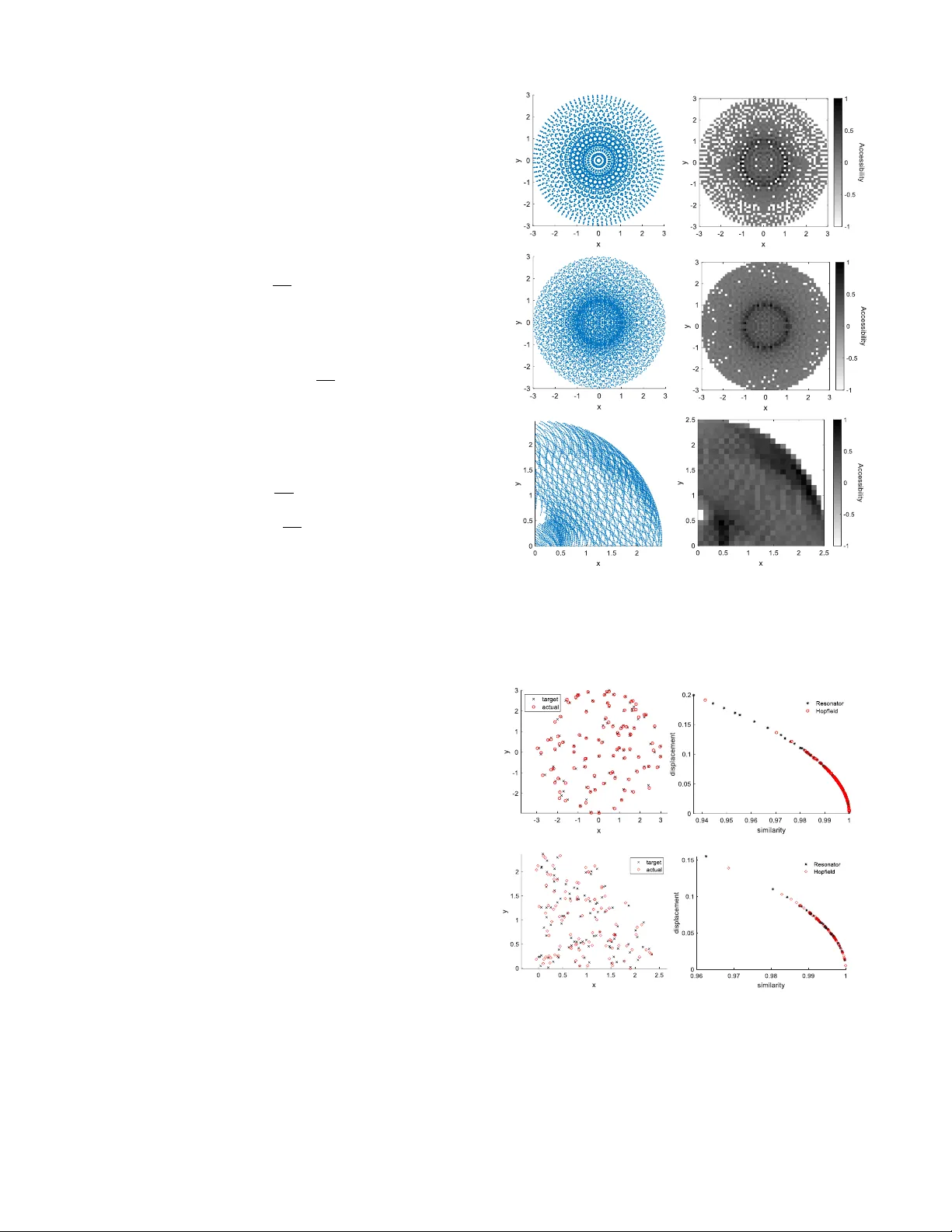
Robot Arm Control via Cognitive Map Learners Nathan McDonald Christian Brazeau Air Force Research Laboratory nathan.mcdonald.5@us.af.mil Colyn Seeley Rochester Institute of Technology Abstract — Cognitive map learner s (CML) have been shown to enable hierarchical, compositional machine learni ng. That is, independently trained C ML modules c an be arbitrarily c omposed together to solve more complex p roblems without task -specific retraining. This work applies this app roach to control the movement o f a multi-jointed robot arm, where by each arm segment’s angular position is governed by an independently trained CML. Operating in a 2D Ca rtesian plane, target po ints are encoded a s phasor hypervectors according to fractional power encoding (FPE). This phasor hypervector is th en factorized into a set of arm seg m ent angles either via a resonator network or a modern Hopfield network. These arm segment angle s are subsequently fed to t he ir respective arm segm ent CMLs, which reposition the robot a rm to the target point without the use of inverse kinematic equations. This work presents bo th a general solution fo r both a 2D robot ar m with an arbitrary number of arm segments and a particular solution for a 3D arm with a single rotating base. Keywords — hyperdimensional computing, vector symbolic architectures, cognitive map learner, compositional mac hin e learning, robotics I. I NTRODUCTIO N Deep neural networks (DNN) are freq u ently implem ented as monolithic sol u tions, e.g. a single DNN t rained for a single task. A limitati on of this approach is that training by stochas tic gradient p reclu d es tri v ial p o st-tra ining composabi lity of diverse pretrain ed DNNs. Even ensemble networks deliber ately construct ed with multipl e pretrained DNNs must still be fine- tuned as a mo n olithi c entity for optimal results [1 ]. DNNs are therefo re not suitable as the primary module for composable machine learning. S u ch a framework might consis t of 1) fundament al computin g modules that 2) may be arbitrarily composed t ogether to 3) solv e more complex oper ations than the modules indivi dually yet 4) without reoptimizi ng the modules per new task, typicall y n eces sitating 5) a consistent input/out (I/O) represe ntation [2 , 3 ]. (For exam p le, digital logic is a composable framework where Bo olean logic gates are the composable modules and binary th e common I/O .) This work presents an example of cognitive map learne r s (CML) [4] as composa b le ML modul e s operating upon hyperdime n siona l computing (HDC) hypervect or s as the “common communication protocol” [3 , 5 , 6 ]. CMLs are a collecti on of separate single-layer artifici al neural networks (matrices) colla boratively traine d to learn interna l represent ations of node states, edge actions , and edge action availabilit y from an ab str ac t graph. The key capabil ity of this unusual ML module is that it iteratively pe rforms path pl ann ing between any current and des ired node state pairing, though never explicitl y t rained t o do so . CMLs ca n be readily trained or even explicitly construct ed [6 ] to learn d iscrete state spaces ; however, traini ng a CML on continu o us state spaces often requir e numerous attempts to find a viable soluti on, e.g. a state space comprised of the position angles of all four legs of a quadruped robot [4 ]. Instead of attempti n g to learn this continu o us state space directl y , t his w ork descri bes a preli minary a p proach to control a single multi-joi n ted robot arm via a collect ion o f discrete space CMLs: one CML per arm se gment. A target point is defined in 2D Cartesian space, encode d as a phasor hypervector via fraction al power encoding (FPE), then factorize d into a set of arm angles als o expr essed as hy p ervect or s from the CMLs. From there, the arm segme nt CMLs plot a path to the desired angles , re positioning the whole arm a rbitrarily close to the t arget point (Figure 1). This approach is a general s o lutio n for manipulat ing a 2D robotics arm comprised of an arbitrary number of arm segments. Since rotati on are not commuta tive, only a pa rticular solu tion to 3D arm control is p resented. The main c ontributio ns of this work are as follows: • Defined a workflow for generatin g target points and arm segment CMLs i n a shared representati on space via fraction al power encoding (FPE) of phasor hypervectors • Reinterpre ted findi ng t he set of arm angles at tainin g the target poin t as equival ent to the knapsack p r oblem, solvable v ia h y pervect or factorizat ion methods. Fig. 1. Robotic arm wi th 3 arm segments, articulate d b y 3 differe n t angles (green dashed lines), tar get point ( a , b ), and workflow diagram for re positioning the robot arm. Target point is converted to a phasor hypervector via fractional power enco ding (FPE) , whi ch is then factorize d by t h e res onator into a set of arm segment angles recei v ed a s input by their respective CML. CMLs plot sequence of angular states i n parallel. • Detail ed a method for reposi tioning a robot arm via CMLs witho ut inve rse kinematics equations. Section II describes the mathematics of HDC and CMLs, while Section III details both the construction of the arm segment CMLs and the workflow for their orchestratio n. Section IV p resents the results for this ap proach, fol lowed by discussi on and futu re applications of this resea rch in Sectio n V. II. B ACKGROUND A. Cog nitive Map Lea rner (CML) A cog nitive map learner is a collection of th ree single layer neural n etworks (matrices) w hich are trained or constructed to encode the topology of an ab stract g raph o f n nodes and e edges. Each n eural network learns one aspect of the graph : 1 ) node state representations S ∈ ℝ ( d , n ) , 2) edge action representations A ∈ ℝ ( d , e ) , and 3) the availability G ∈ ℝ ( e,n ) of edge actions from each node state, wh ere d is the size of th e representation space. A CML is trained to predict the nex t node state s t +1 given the current node state s t and chosen edge action a t , s t +1 = s t + a t , (1) For the use case here, the node states S are predefined by fractional power en coding with phasor hypervectors (Section II I. A, B), so th e edge action matrix A is calculated explicitly as a ij = s i – s j . (2) The chief u se of the CML is for p ath plann ing, despite not having been explicitly trained for the task (only pairwise state transitions are presen ted in Eq. (2 )). The CML module takes two inputs: the current node state s t and a desired node state s d (Figure 2). Becau se all node states are un ambiguou sly stored as column vectors in S , they may be trivially extracted from any pretrained CML, p roviding th e vo cabulary fo r an external agent to task the CML . The CML can also clean up no isy inputs provided they exceed a minimum similarity threshold with respect to the kno wn state hypervectors in S , Eq. (6 ). For each iteration of the CML, th e utility o f every edge action with respect to s d is calculated b y multiply ing the difference between the d esired and current node state by the pseudo- inverse of edge action matrix A , u = A † ( s d – s t ), (3) where † denotes th e Moore-Penrose pseudo-inverse. The gating vector g t (corresponding to node s t ) is multiplied elementwise with the utility scores vector, ensu ring on ly legal edge actions have nonzero valu es. A winner -take-all ( WTA ) alg orithm produces a one -hot v ector indicating the index of the most useful edge ac tion, which is then add ed to the current node state t +1 = s t + A ∙WTA ( g t ⊙ u ), (4) where ⊙ deno tes elementwise m ultiplication ; and the CML returns t +1 as outpu t, the pr edicted most useful, leg al next node state. Since this output is also a valid inp ut, the CML can iterate over Eq . ( 3, 4) un til s d ≈ s t ; whereby , the CML finds a reasonabl y m inimal p ath b etween any initial and desired n ode state, competitive with Dijkstra and A* [7 ] b ut without the mathematical o ptimality guarantees [ 4 ]. B. Hyp erdimensional Co mputing (HDC) By making t h e CML represent ation s p ace s ize d ≥ 512, node and edge vectors become sema n ticall y meanin gful entit ies suitable for symbolic reasoning using hyperdimensi onal computi ng (HDC) algebra [8, 9 ]. The key metric under HDC is similarit y sim . As the length of randomly generated hypervectors incr eases, the similarity between any two converges to pseudo -orthogonality [ 10 ]. The basic operations of HDC , viz. addition, multiplicatio n, and recovery, therefore create and manipulate similarities amo ng hyperv ectors . Addition and multiplication are elem entwise op erations, so the dimension of the resultant hypervector remains d reg ardless o f the number of hyper vectors added or multiplied together. The normalized dot product is used to compare hypervectors, where identical vectors have a sim ilarity of sim = 1 and pseudo- orthogonal hyp ervectors sim ~ 0. Addition is an alogous t o set creation, wh ere t h e su m hypervector is similar to each of the comp onent hypervectors, q = [ s 1 + s 2 + s 3 ], (5) and sim ( q , s 1 ) ~ sim ( q , s 2 ) ~ sim ( q , s 3 ) ≫ sim ( q , s 4 ) ~ 0. Multiplication, denoted as ⊙, bind s h ypervectors to gether, analogous to key -value p airing. Un like ad dition, the product hypervector is no t similar to either of its fac tor h ypervectors , sim ( x ⊙ y , x ) ~ 0; but im portantly the operation is reversible (Section I II. A) . Th e recovery, or cleanup, o peration rec compares a noisy quer y hypervector to all other known hypervectors stored in a dictionary a n d returns the most similar hypervector above a threshold θ , rec ( 1 , S , θ ) = s 1 . ( 6) III. M ET H ODS A. S pecifying a target poin t Let a rob o tic arm have n ar m segme nts. The goal is t o determin e the angle of each arm segment such that the end effector of th e arm t ouches a target point (Figure 1 ). Cartesi an axes x and y are each define d as a u nique base vector of length d =1 024, whose elements are phasors, comple x v alues with unit amplitude , Fig. 2. CML wiring diagram: i nputs s d and s t ; output t +1 ; and inter n al node state representa t ions S , edge a ctions A , and gating G . x = e j 2 πU y = e j2πU , (7) where j is the imagi nary unit and U is a uniform random vector with elements [0 , 1]. Given target point ( a , b ) ∈ ℝ , each hypervect or x and y is rais ed to the co rrespon ding powe r, hence the nam e fracti onal power encoding (FP E) [ 11 ] , then m ultipl ied together, ( a , b ) ⇒ p = x a ⊙ y b , (8) What makes FPE uniquel y suitable for this applicati on is that multipli cation of phasors is equivalent to addition of their exponents (Figure 3). Enco d ed positions can be further manipulat ed along both axes by subseque nt multiplicat ion, includin g negative exponents (multiplicati ve inverse) through use of t he comple x conjugate * , e.g. x 3 y 4 = ( x 1 y 2.2 ) ⊙ ( x 2 y 1.8 ) = ( x 5 y 5 ) ⊙ ( x 2 y 1 )* , (9) where the ⊙ between x and y is dropped for visual clarity. B. Arm segment CML Consider a singl e arm segment of length r about a p ivot , tracing a circle in the 2 D plan e. The accessi ble angle states per arm segme nt are rest ricted as t h e m th roots of unity, ω k = 2π k / m , ( 10 ) where k = { 1, 2, … , m - 1 , m } ( Figure 4). To i n terac t with the t arget point defined in Eq. ( 8), each o f the m node states s m are also encoded via FPE using the same x and y basis vectors from Eq. (7), a = r co s (2 π k / m ) b = r sin ( 2π k / m ) ( 11 ) s k = x a ⊙ y b . ( 12 ) In the first 2D case, let the arm segme n ts not be constrai n ed by physics, namely permitted to pass through one another. In this way, each arm segment CML learns a bidirectional ring graph. Since e ach angle state s k is precomputed by Eq. ( 12 ), each edge action a betwe en sequ ential states s k+ 1 and s k is explici tly calculat ed as a k+ 1, k = s k+ 1 - s k . ( 13 ) a k,k+ 1 = s k - s k+ 1 . (14) A CML C n is created for each arm segment, and each C n is created independe ntly of any other CML, excepti n g that all CMLs must use th e same x and y basis vect ors, Eq (7 ). For a c oncrete baselin e, let r = 1 for n = 3 arm seg m ents. Let each arm segment touch m points on the circumferen ces of the unit c ircle. Gi v en a s ufficientl y h igh number of s tates m p er arm segment, any point satisf ying 3 2 ≥ x 2 + y 2 is expected to be a valid robot arm effector position. Therefore, given target hypervect or p from Eq. (8), the goal is to recover sets of arm positio n stat es s m of th e form p = x a y b ≈ x ( i + j + k ) y ( l + m + n ) ≈ x i y l ⊙ x j y m ⊙ x k y n , ( 15 ) where the pr oduct of the re co vered factors has a similar ity greater than a th reshold θ . C. Factoring hypervectors Recall tha t for HDC al g ebra , multipli cation results i n a product hypervector pseudo-ortho g onal to i ts factors. Th erefore, factorin g a product hypervector via a similarit y search alone results in a combinato rial explosion problem, si n ce even partial products of factors are dissim ilar. However, both a resonator network [ 12 , 13 ] and a mod ern Hopfield network [ 14 ] can efficientl y factor p r oduct hypervectors given codebooks of the candidate vectors. For the n = 3 arm segments case, the three CML angle state matrices S serve as codebook s of candi d ate factors, which for visual clarit y are refe rred to he r e as A = [ a 1 , …, a m ], B = [ b 1 , …, b m ], and C = [ c 1 , …, c m ]. Giv en target p o int p ≈ a i ⊙ b j ⊙ c k , to factor via a resonator network , the following resonator module equations are iterate d ( t + 1) = f ( AA ⊤ ( p ⊙ b * ( t ) ⊙ * ( t ))) b ( t +1) = f ( BB ⊤ ( p ⊙ * ( t ) ⊙ * ( t ))) ( t +1) = f ( CC ⊤ ( p ⊙ * ( t ) ⊙ b * ( t ))) , ( 16 ) where , b , and are estimations of a factor from each codebook , * denotes the complex conju gate, and f forces the magnitude of all elements to 1. The c urrent a r m angle esti mates , b , and are initializ ed as some c o mbinati on of 1) the current arm se gment state, 2) the sum (or su perpositi on) of all node stat es of the Fig. 3. Similarity of FPE encoded points, illustrating multiplication as addition of exp onents. a) b) Fig. 4. a) m = 11 di screte arm segment angle s tates (blue dots) and b) similarities among node states phasor hypervectors u sing FPE and circular enco d ing. respecti v e codebook, a nd/or 3) a random phasor hypervect o r to inject noise into the system . Every iteratio n t , each resonator module recovers an estimate of its own factor by unbinding the estimates from a ll ot her m odule s with the target point. The decoded h ypervect or is then compared to t h e mod u le’s codebook, and an auto-associ ative memory attempts to converge each estimat e . In this way, the resonator network levera ges superposi tion to search multiple potential factorizati ons simultaneo u sly. Each new factor estimate is t hen shared with the other m odules t o update their own factor esti mates. After every 10 iterations , the similarity of each estimat ed factor is measured against its respective codebook. If the index of t h e most si milar entry is t he same for t h e last two iterat ions per code book, then the resona tor algorithm term inates and the actual codebook entries are returned (Figure 5a ). N o te, it is not uncommon for the resonator to converge on pai rs of anti-parall el versions of the factor, sim ( a ,- a ) = -1. Ma them atically, this is because negatives cancel out , sim ( a ⊙ b , - a ⊙ - b ). The proposed arm configura tion to reach the targ et point is computed direct ly from the in dexed codebo oks entries , p = a i ⊙ b j ⊙ c k . ( 17 ) This is because the resonator only approximates the recover y operatio n on the estimated fact or s, Eq. (6) . Figure 8a shows the range of estimated f actor simil arities when the resonator algorith m terminates . However, the recovery operati o n can be subseque n tly appli ed success fully to all estimate d factors, since their similarities are all greater than the noise floor for random vectors, η floor = 0.05 for d = 1024. Alternativ ely, a modern Hopfield network is used [14]. While the origi n al Hopfield network is an iterati ve algorith m, minimizin g t h e energy calculati on between the input state pattern and that sto r ed in the network, this update d algorit hm attains n ear optimal p attern restor ation after only a single iteratio n, s = softmax ( β S ⊤ ) S , ( 18 ) where S is the codebook, is the initial query vector, s is the recovered patter n , and β is a bias term. Given target point p as before, to factor via a modern Hopfield network, the f o llowi ng equations are iterate d = softmax ( β A ⊤ ( p ⊙ b * ⊙ * )) A b = softmax ( β B ⊤ ( p ⊙ * ⊙ * )) B = softmax ( β C ⊤ ( p ⊙ * ⊙ b * )) C . ( 19 ) After each iteration, the similariti es of the es timated f actors are measured with thei r re spective codebooks. Unlike a resonato r network whic h c onverges to a solution , the Hopfie ld network jumps among sol utions over su b seque nt iterations (Figure 5b). So for a termi n ati on co ndition , per ite ration, if each estimated hypervect or has a si milarity greater than sim max ( , S ) ≥ 0.75, then Hopfiel d network is considered converged and the actual co d ebook e ntries are return ed. Regardless of factoriz ation method, after 50 iteratio n s, if either 1) not all the codebooks h ave converg ed or 2) the proposed arm configuratio n p is below the similarit y threshold, then the factoriz ation method is reinitializ ed, with a random subset of estimated f acto rs initialized as random phasor hypervect ors to inject noise into the system. If after 50 reinitia lizations an acceptable solution is st ill not found, then the threshol d is r educed by 0.01 until t he system succ eeds. D. Repositionin g arm segments via CMLs Lastly, each arm segment CML receives as input the respecti v e recovere d factor s n = { a i , b j , c k } as the desired state s d . Each CML then iterati vely plots a sta te t ransiti on path from its current angle stat e s t the desired state s d in parallel; whereupon the robot arm effect o r approaches the target point ( a , b ) with arbitrar y precisi on. E. 3 D arm control 2D vect or additi on is commuta tive, and this pro p erty is preserve d i n t he elementwise multiplicat ion of FPE hypervect ors, such that the robot end effector position is unaffect ed by the order of the arm segments . This is n ot true when operatin g in 3D space, since rotatio n s are not commutati v e. The following is o ne possible solution for controlli ng an n = 3 ar m seg m ents arm wit h only a rotati n g base. a) b) Fig. 5 . a) Factorization via resonator net work, where each row is one iteration of the network. Colors indicate the similarity of the estimated factors with res pect to their c o debooks . Figure shows c onvergence t o anti - parallel ve rsions of codebook entries. b) Factoriza tion via modern Hopfield networ k. The ta rget poi nt ( a , b , c ) in Cartesian space is first converte d to spherical c oordinates ( ρ , θ , ϕ ). ρ and θ are then re-converted back to the XY p lane, p = x ρ cosθ cosϕ y ρ cosθ sinϕ . ( 20 ) The above 2D arm p ositi oning algorith m is then run as before to positio n the ar m end effect or to poi nt ( ρ , 0 , ϕ ). Instead of using FPE to encode the final rotation of the arm to θ , circular c oding is used for the CM L. The initial state of t he rotating base is initialized as s 1 = 𝑒 𝑗 2𝜋 𝑚 𝑈 , ( 21 ) where U is a uniform random distributio n of integers k = {1, 2, …, m } an d m is the total num ber of states to be generated. Ea ch subseque n t stat e is incremente d as s k +1 = s k ⊙ 𝑒 𝑗 2𝜋 𝑚 . ( 22 ) That is, the FPE arm segment CML states encode alloce n tric orientati on; whereas, the circula r CML encodes egocentric orientati on. The circular CML only has two edge action states: forward ( counter-clockwis e) and backwards (clockwise), a 1 = 𝑒 𝑗 2𝜋 𝑚 , ( 23 ) a 2 = 𝑒 − 𝑗 2𝜋 𝑚 , ( 24 ) respecti v ely. Due to the pe riodic nature of phasors, after m nodes, the node states repeat, s 1 = s m ⊙ a 1 (Figure 5 b). Since thi s circular CML shares no basis vectors with the arm segment CMLs, a dictionary must be maintaine d pairin g the codebook index with a real- v alue d a n gle. Given target angle θ , the i ndex of the circular CML state closest to that angle is selected as the desired state s d for the circu lar CML. T h e ci rcular CML thereby rotates the whole arm to arrive at ( ρ , θ , ϕ ), approximating the target p o int ( a , b , c ). IV. R ESULTS A. 2 D unconstr ained arm For the unconstrai ned 2D case, the arm segments are allowed to pass throug h one another. Given a n arm of n = 3 arm segments of length r = 1, then all points satisfying 3 2 ≥ x 2 + y 2 are expected to be accessible b y the robot arm. As a practi cal measure , this space was d iscretiz ed into 0.1x0.1 grid ce lls, defining 2,809 possible target points p . When each arm had m = 29 angle positio n s, t here were 2 4,389 p o ssible end effec tor st ates (Figur e 6a); h o weve r , o n ly 74.5% of the aforem entioned g r id cells were reachabl e due to the highly structu r ed poi n t dist ributi on (Figure 6b). Howeve r, leveragi ng the insights of residue number systems [ 15 ], gi ving th e arm segment CMLs sequential co - primes of angle states m = [19, 23, 29] cover ed 98.8% of the available grid cell p oints (Figure 6d) yet with onl y 12,673 end effector states due to a more diffuse poi nt spread (Fi gure 6c) . While the target point was given in Cartesian space, the factoriza tion routi nes were co ntingent upon only the similarity of the rec onstructed pr o duct h ypervecto r p and t h e tar g et vec tor p , sim ( p , p ) ≥ θ . Heu r istic ally, a h ypervector similarit y threshol d of θ ≥ 0.99 corresp onded well with an arbitrari ly acceptable Euclidea n displa cement of <0.1 (Figure 7a) . The mean displaceme n t usi ng the reson ator was ϵ = 0.071 ± 0.036 and ϵ = a) b) c) d) Fig. 7. Scatter plot of target point and final arm position f or a) 2D and c) 3D arms. Strong correlation between Euclidean displaceme nt and hypervector similarity for resonator network and Hopfie ld network for b ) 2D and d ) 3D arms. a) b) c) d) e) f) Fig. 6. F or m = [29, 29, 29], a) all 24,389 attainable po i nts an d b) correspondin g histogram when mapped to 0.1×0.1 grid cells, covering only 74.5% of possible cells. For m = [19, 2 3 , 29], c) all 12,673 a ttainable points a nd d ) histogram covering 98.8% of possible cells. e) F or the gripper arm, all attainable points w ithin the first q uadrant and f) hi stogra m covering 99.4 % of cells. I na ccessible points (white c e lls) are color shifted to enhance c ontrast. 0.061 ± 0.03 0 using the Hopfiel d n etwor k . However , the high similarit y thres hold required multi p le facto rization initializ ations (Figure 8b). Out of 100 random accessi b le target grid cell points, the resonator n etwor k found a solution on the first initializati on attempt 14% of the time ( mean 15.0 ± 12.1 initializ ations) and th e H opfield n etwor k 10% of the time ( mean 31.6 ± 25 .9 initializ ations). As sh own i n Fi gure 6d, the number of arm co nfiguratio n s that reached a grid cell point varied signifi cantly. Since factoriza tion is determinist ic, the inclusio n of rando m phasor hypervect ors as part of initializati on p rompte d the system t o find multiple acceptabl e arm confi g urati ons. Given 100 random accessible grid ce ll points and 20 factorizat ion initial izatio n s each, t h e r esonator fo u nd 5 .1 ± 2 .3 arm configurat ions per point and the Hopfield network found 5.8 ± 2 .2 ( Figur e 8 c). Present ly, there is no m echanism included for evaluating among multiple proposed solutio n s. A possi ble s election criterion is to minim ize the total change across the arm angle s tates since the inde x the target a n d curr ent node states are kn o wn. B. Con stra ined 3D arm To ill ustrate the relevance of this t echnique to 3D physics- based robots, the n = 3 arm se g ments were not permitted cause any part of the arm to contact the floor nor p ass thro ugh one another. These physic al limitatio n s were enforced through the arm segment CMLs directly. The arm segment g raphs were made li near graphs (as oppos ed to ring graphs) by removing the bidirecti onal edges between the first s 1 and last s m n ode state. The l ast arm length was sho rted to r c = 0.5, and the maximum range of movement for e ach arm was r estricte d and then f urth er offset (Fi gure 1): ω a = [ 0 , π ], ω b = [ 0 , π ] + 3π/2 , ω c = [0, π /2] + 15 π/ 8. (25) Since the circular CML for θ can be m ade arbitrarily close, the following results focus on attaining ( ρ , ϕ ) in the 2D XY plane. These r estri ctions limit ed the arm to operate o n ly in the first quadrant of the Cartesian space yet preser v ed 99.4 % coverage (Figure 6e, f ). As before, the mean displace m ent using the r esonator was ϵ = 0.082 ± 0.041 and the Hopfield network was ϵ = 0. 065 ± 0.026 (Fi gure 7 c, d). Out of 1 00 rand o m accessible target grid cell points, the resonato r network foun d a solutio n on the first initia lization attempt 15 % of t he tim e (mea n 13.5 ± 12. 4 initializati on s) and the H opfield network 13 % o f the time (mean 35.1 ± 29.9 initializati ons) ( Figure 8e ). Lastly, given 100 random accessible grid cell points and 2 0 factoriz ation initializ ations, the resonato r found 6.74 ± 3.22 arm configura tions per p o int, while the Hopfiel d netwo rk fo u nd 7.28 ± 3. 01 (Figure 8f ). V. D ISCUS SION The emphasis on this work wa s to illustrate how CMLs can be arranged to collaborativ ely control 2 D and 3D robot arm movement. In essence , this approach reinterpr et ed arm positio n ing as a s pecial case of the knapsack problem , a subset sum pr oblem. D ue to the s uperpositi on properties of HDC, factoriza tion tech n iques exist that ca n efficie n tly solve t h is task. At this time, a formal com parison against sta n dard inver se kinematics equatio n solvers has not bee n accomplished, which would include additio n al metrics such as computation time and path length [16, 17]. It is wort h noti ng mea n while that this CML framework avoids the singula rity f ail u re condition of inverse kinematics solvers by iterati vely relaxing of the minimum a) b) c) d) e) f) Fig. 8. Histogram of the similarities of the estimated factors with their codebook entry, δ ( , a ), upon completion of factorization for a) unconstrained 2D a nd d) constraine d 3D . Hist ogram of f actorization ini tializations to recover arm position above thres hold for b) 2D and e) 3D . Number o f unique arm positions for 100 points with 2 0 initializations for c) 2D and f) 3D . similarit y thresh o ld until a sol u tion is p roduced (Figure 7b, d) . The current framewor k also does not include environmen tal sensors to invoke an obst acle avoidance routine, but it has already been shown that CMLs immediat ely ad apt t o changes in state or acti on availabi lity [ 4 ]. R enner, et al. also described non- commutati v e factorizati on techniques whic h may be applica ble to expanding the framework described here t o control a sta ndard 6-degree of freedom robot arm [18, 19]. The same work also described a me thod f or implement ing p h asor HDC operati o ns in spiking neural n etworks on the Loihi neurotrophic h ardware , which could enable depl oyment of these algorithms on smaller robotic pl atforms. The propose d 3D arm positioni ng method will next be applied to the inciting observation about the limit ations of usi ng a CML to control the quadruped robot . Because the arm segments states are created via FPE, it is s traig h tforwar d t o copy the CML fr amework, amend the node states S , and rec o mpute the action matrix A for each additional leg. Using a central pattern generator to prescri be target leg positions in time, the proposed met h od is expected to contr o l a basic quadruped robot, though with nominall y 12 CMLs (3 CMLs per leg) instead of a single, m o nolit h ic CML. On e simplificatio n may be to consi der the possibl e inter p lay betwe en CMLs and subsumptiv e robotics design ideas [20, 21, 22], focusing on egocentric leg displaceme n t (joint angles α and β ) indepe ndent of physical displaceme n t. VI. C ONCLUSION Cogniti v e map learners (CML) are examples of ML modules, c apable of being indepe ndently created t hen composed together to perform more complex operations. In this work, each CML controls the a ngular d ispl acement of a single arm segment . Because the states are expressed as high dimensi onal phasor vectors, hyperdimensiona l comp uting (HDC) algebra can b e used to factori ze a target p oint , also expressed a phasor vector, into a set of arm angles witho u t u se of inverse kinematic equations . Having re covered this set of angles, the arm segment CMLs repos ition t hemselves such that in the aggregat e, the robot arm m oves to the t arget p o int. This method for co ntrolli ng a singl e arm s hould extend t o cont rolling mul tiple arms , e.g. a quadruped robot, where a central patt e rn generat or defines the target p o int pe r leg in ti me. A CKNOWLEDGMENT Any opinion s, finding s and conclu sions, o r r ecommendations expressed in this m aterial are tho se of th e authors, and do not necessarily reflect the views of the US Governmen t, t h e Department of Defense, or the Air Force Research Lab. Approved for Public Release; Distribution Un limited: AFRL- 2026 -0765 R EFERENCES [1] A. M oha mmed and R . Kora, “A co mprehensive re v iew on ensem ble deep learning: O pportunities and challenges,” J. King Sa u d Uni v. Comput. I nf . Sci. , vol. 35, no. 2 , pp. 757-774, 2023. [2] S. Duan, “Unifying Kernel M ethods and Neural Networks and Modularizing Deep Learni ng,” P h.D. diss e rtation, Univ. of Florida, Gainesville, FL , USA, 2 020. [3] V. Clay, N. Leadholm, an d J. H awkins, “The Thousand Brai n s Pr oject: A New Paradigm for Sensorim otor Intelligence,” arXiv preprint arXiv:2412.1835 4 , 2024. [4] C. Stöckl, Y . Yang, and W. Maass, “Local prediction -learning i n high- dimensional spaces e nables neural net works to plan,” Nat. C o mmun. , vol. 15, no. 1, p. 23 4 4, 2024. [5] N. R. McDonald, “Modu l ar, hierarchi c al machine learn i ng for sequentia l goal completion,” in Disruptive Technologies in Inform a tion Sciences VIII , vol. 13058, S PIE, 2024, p p . 19-33. [6] N. M cDonald and A. Dematteo, “Assembling modular, hierarchical cognitive map learners with hyper d imensional computing,” i n Proc. 2024 Int. Joint Conf. Neural Net w . (IJCNN) , 20 2 4, pp. 1- 9. [7] S. Russell and P. Norvig, Artificial Intelligence: A Modern Approach. Hoboken, NJ: Pe arson, 2021. [8] D. K leyko, D. Rachkovskij, E. Osipov, and A. Rahimi, “A Survey on Hyperdimensio n al Computing aka Ve c tor Symbolic A rchitectures, Part I : Models and Data Tr ansformations,” AC M Comput. Surv. , vol. 55, no. 6, p. 130, 2023. [9] D. K leyko, D. Rachkovskij, E. Osipov, and A. Rahimi, “A Survey on Hyperdimensio n al Computing aka V e ctor Symbolic Arc h itectures, Part II: Applications, Cogniti v e Models, and Challenges,” ACM Comput. Surv. , vol. 55, n o . 9, p. 175, 2023. [10] P. Kanerva, “Hyperdimensiona l computing: An introduction to computing in d istributed representation with high -dimensional random vectors,” Cognitive Computation , vol. 1, pp. 13 9 – 159, 2009. [11] B. Komer, T. C. Stewart, A. R. Voelker, and C. Eliasmith, “A neural representation of continuous space using fractional binding,” in Proc. Annu. Meeting C ogn. Sci. Soc. , vol. 41, 2019. [12] E. P . Fr ady, S. J. Kent, B. A. Olshaus en, a nd F. T. Sommer, “Resonator networks, 1 : An efficient solution for factoring high -dimensional, distributed representations of data structures,” Neura l Co mput. , vol. 32, no. 12, pp. 231 1 -2331, 2020. [13] S. J. Kent, E. P. Frady, F. T. Somm e r, and B. A. Olshausen, “Resonator networks, 2 : Factorizatio n performance and capacity compared to optimization- base d methods, ” Neura l Com p ut. , vol. 32, no. 12, pp. 2332- 2388, 2020. [14] H. Ramsa u er et al., “H opfield networks is all you nee d ,” arX iv preprint arXiv:2008.0221 7 , 2020. [15] C. J. Kymn e t al., “Comput i ng w i th re sidue num b ers in high -dimensio nal representation,” Ne u ral Comp u t. , vol. 37, n o. 1, pp. 1-37, 20 2 4. [16] KuCuk, Serdar, and Z afer B i ngul. "T h e in verse kinem atics solutions of industrial robot manipulators." In Proceedings of the IEEE Internation a l Conference on M echatronics, 2004. ICM'04. , pp. 2 74-279. IEEE, 2004. [17] Huang, Guo-Shing, Chiou-Kou Tung, Hsiung-Cheng Lin, and Shun-Hui Hsiao. "Inverse kinematics analysis trajectory planning for a robot arm." In 2 011 8th Asian c ontrol conf e rence ( ASCC) , pp. 965-970. I EEE, 2011. [18] A. R enner, et al. , “Neuromor phic v isual scene underst anding with resonator networ ks,” Nat. Mach. I ntell. , vol. 6, no. 6, pp. 64 1 -652, 2024. [19] A. Renner, et al. , “Visual odometry with neuromorphic resonator networks,” Nat. M ach. Intell. , vol. 6, no. 6, p p . 653-663, 2024. [20] R. A. Br o oks, “A robot that w alks; emergent behaviors from a carefully evolved networ k ,” Neural Com p ut. , vol. 1, no. 2, pp. 253-262, 1989. [21] N. Pashenkov and R. Iwamasa, “One -Chip Solution t o Intelligent Robot Control: Impleme nting Hexapod Subsumption Architecture Us i ng a Contemporary Micr op rocess or,” Int. J. Adv. Robot. Syst. , vol. 1, no. 2, p. 10, 2004. [22] Bates, Alexander Shakeel, Jasper S. P helps, Minsu Kim, Helen H. Yang, Arie Matsliah, Zaki Ajabi, Eric Perlman e t al. "Distributed control circuits across a brain-and-c o rd connect o me." bioRxiv (2025).
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment