GraspADMM: Improving Dexterous Grasp Synthesis via ADMM Optimization
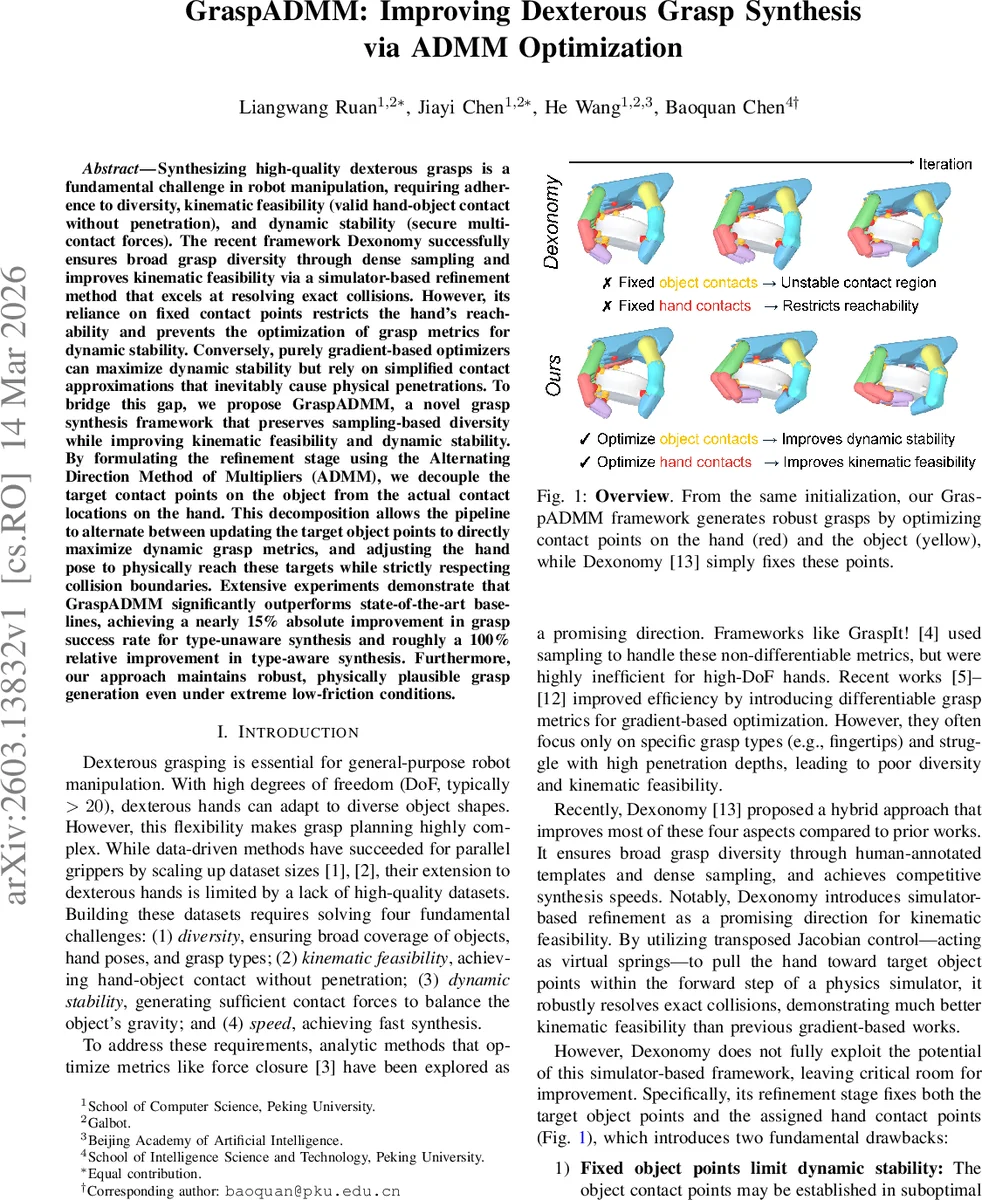
Synthesizing high-quality dexterous grasps is a fundamental challenge in robot manipulation, requiring adherence to diversity, kinematic feasibility (valid hand-object contact without penetration), and dynamic stability (secure multi-contact forces). The recent framework Dexonomy successfully ensures broad grasp diversity through dense sampling and improves kinematic feasibility via a simulator-based refinement method that excels at resolving exact collisions. However, its reliance on fixed contact points restricts the hand’s reachability and prevents the optimization of grasp metrics for dynamic stability. Conversely, purely gradient-based optimizers can maximize dynamic stability but rely on simplified contact approximations that inevitably cause physical penetrations. To bridge this gap, we propose GraspADMM, a novel grasp synthesis framework that preserves sampling-based diversity while improving kinematic feasibility and dynamic stability. By formulating the refinement stage using the Alternating Direction Method of Multipliers (ADMM), we decouple the target contact points on the object from the actual contact locations on the hand. This decomposition allows the pipeline to alternate between updating the target object points to directly maximize dynamic grasp metrics, and adjusting the hand pose to physically reach these targets while strictly respecting collision boundaries. Extensive experiments demonstrate that GraspADMM significantly outperforms state-of-the-art baselines, achieving a nearly 15% absolute improvement in grasp success rate for type-unaware synthesis and roughly a 100% relative improvement in type-aware synthesis. Furthermore, our approach maintains robust, physically plausible grasp generation even under extreme low-friction conditions.
💡 Research Summary
GraspADMM addresses a critical gap in dexterous grasp synthesis by combining the strengths of sampling‑based diversity (as in Dexonomy) with a physics‑based refinement that simultaneously optimizes dynamic stability and exact collision avoidance. The authors observe that Dexonomy’s refinement stage fixes both the target object contact points and the hand contact points, which limits the ability to improve force‑closure quality and to accommodate the hand’s kinematic constraints. To overcome this, GraspADMM treats the target object contacts (pₒ) and the actual hand contacts (pₕ) as separate variables and solves a constrained optimization problem via the Alternating Direction Method of Multipliers (ADMM).
The core objective is to minimize a force‑closure residual e, defined as the norm of the net wrench after solving a quadratic program that enforces friction‑cone constraints at each contact. The ADMM formulation introduces an augmented Lagrangian with a penalty term ρ‖pₕ – pₒ + λ‖², where λ is the scaled dual variable. Optimization proceeds in three alternating steps: (1) update pₒ by a single gradient‑descent step on the residual plus the penalty term, projecting the points back onto the object mesh after each update; (2) update the hand pose q and pₕ by forward simulation in MuJoCo, applying virtual spring forces fᵢ = k_f (pₒ – λ – pₕ) at each contact, mapping these forces to joint torques via the transposed hand Jacobian, and letting the physics engine resolve collisions while keeping the hand within its feasible workspace C; (3) update λ via the standard ADMM dual ascent λ ← λ + (pₕ – pₒ). By iterating these steps (typically 5–7 times), the method drives the object contacts toward configurations that maximize dynamic stability while the hand contacts are pulled toward those targets without penetrating the object.
The pipeline retains Dexonomy’s initial stages: human‑annotated grasp templates, dense sampling to align hand and object, and a post‑filtering step to discard severe penetrations. The novelty lies entirely in the refinement stage, where the ADMM loop replaces Dexonomy’s transposed‑Jacobian “virtual springs” that only enforce kinematic feasibility. GraspADMM’s decoupling eliminates the need to back‑propagate gradients through discontinuous collision physics, allowing exact mesh‑to‑mesh collision detection and strict non‑penetration guarantees.
Experiments were conducted on a benchmark of over 5,600 objects covering a wide range of shapes and on multiple grasp types (e.g., fingertip, side, palm). Baselines included Dexonomy, MALA, GraspIt!, and recent gradient‑based methods. Results show a ~15 percentage‑point absolute increase in overall grasp success rate compared to Dexonomy for type‑agnostic synthesis, while maintaining zero penetration depth and comparable runtime (~0.45 s per sample). For type‑aware synthesis, GraspADMM achieves a 20‑30 percentage‑point boost (approximately a 100 % relative improvement). Under extreme low‑friction conditions (μ = 0.1), where other methods fail catastrophically, GraspADMM still produces stable multi‑finger grasps with success rates above 70 %. Ablation studies confirm that both the object‑point update and the hand‑pose update are essential; removing the λ update slows convergence, and fixing pₒ eliminates the dynamic stability gains.
Key contributions are: (1) a principled ADMM‑based refinement that simultaneously maximizes a differentiable grasp quality metric and enforces exact collision constraints; (2) seamless integration with Dexonomy’s sampling‑based diversity pipeline, preserving its speed and coverage; (3) extensive empirical validation demonstrating superior success rates, robustness to low friction, and zero penetration. Limitations include sensitivity to ADMM hyper‑parameters (ρ, k_f) and reliance on accurate mesh representations for projection; future work will explore adaptive parameter tuning, extension to multi‑object manipulation, and real‑robot deployment with sensor noise and control latency.
In summary, GraspADMM provides an effective, physically plausible, and computationally efficient framework for high‑quality dexterous grasp synthesis, advancing the state of the art by bridging the gap between dynamic optimization and strict kinematic feasibility.
Comments & Academic Discussion
Loading comments...
Leave a Comment