Path Planning for Sound Speed Profile Estimation
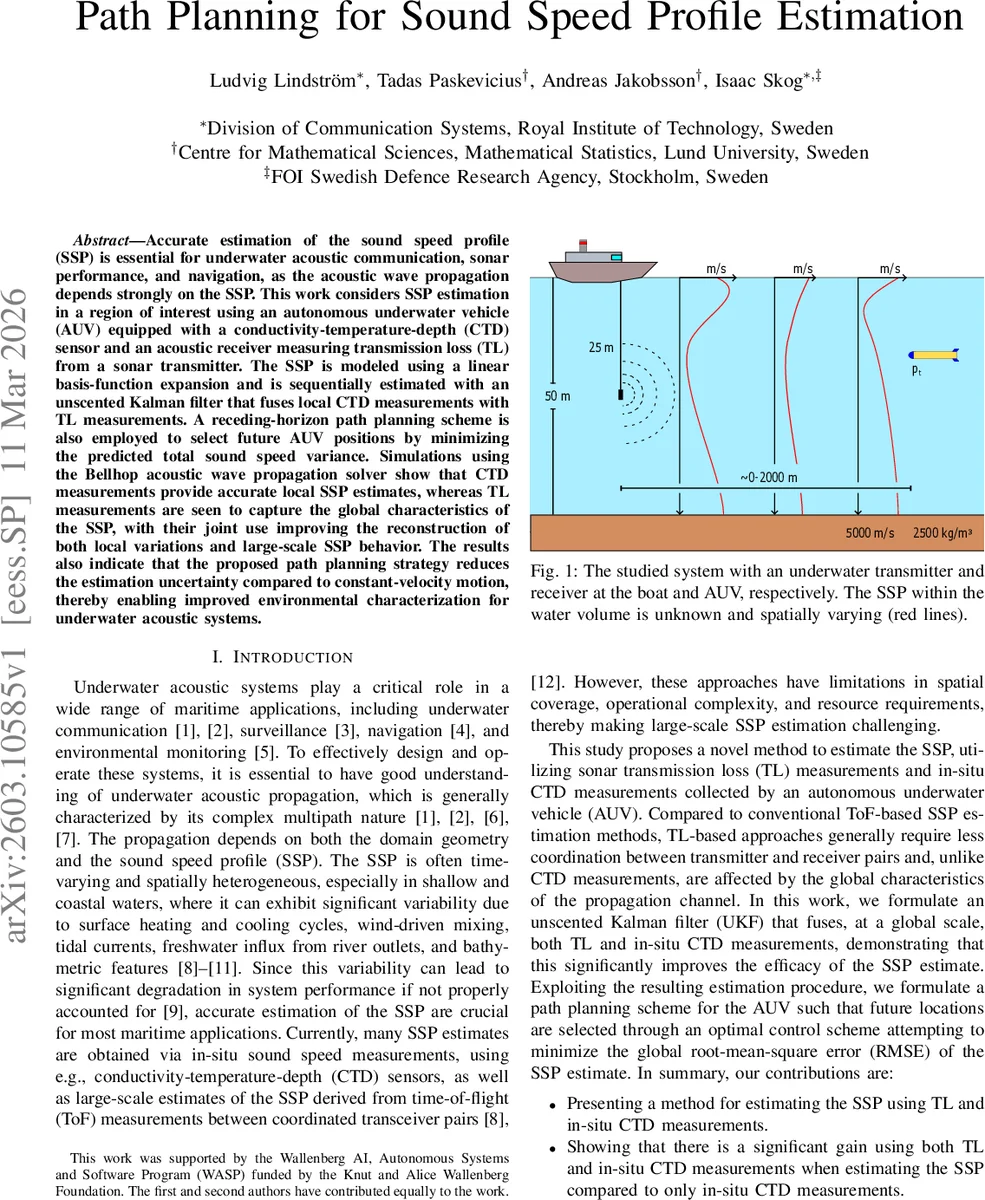
Accurate estimation of the sound speed profile (SSP) is essential for underwater acoustic communication, sonar performance, and navigation, as the acoustic wave propagation depends strongly on the SSP. This work considers SSP estimation in a region of interest using an autonomous underwater vehicle (AUV) equipped with a conductivity-temperature-depth (CTD) sensor and an acoustic receiver measuring transmission loss (TL) from a sonar transmitter. The SSP is modeled using a linear basis-function expansion and is sequentially estimated with an unscented Kalman filter that fuses local CTD measurements with TL measurements. A receding-horizon path planning scheme is also employed to select future AUV positions by minimizing the predicted total sound speed variance. Simulations using the Bellhop acoustic wave propagation solver show that CTD measurements provide accurate local SSP estimates, whereas TL measurements are seen to capture the global characteristics of the SSP, with their joint use improving the reconstruction of both local variations and large-scale SSP behavior. The results also indicate that the proposed path planning strategy reduces the estimation uncertainty compared to constant-velocity motion, thereby enabling improved environmental characterization for underwater acoustic systems.
💡 Research Summary
Accurate knowledge of the underwater sound speed profile (SSP) is a prerequisite for reliable acoustic communication, sonar operation, and navigation. Traditional approaches rely either on pointwise conductivity‑temperature‑depth (CTD) measurements, which provide high‑resolution local sound speed but suffer from limited spatial coverage, or on large‑scale time‑of‑flight (ToF) techniques that require coordinated transmitter‑receiver pairs and are operationally complex. This paper proposes a novel framework that fuses both CTD and acoustic transmission‑loss (TL) measurements collected by an autonomous underwater vehicle (AUV) to estimate the SSP over a region of interest, while simultaneously planning the AUV’s trajectory to minimize the estimation uncertainty.
The SSP is represented as a linear combination of Gaussian basis functions, c(p)=ϕ(p)ᵀθ, where θ contains the basis weights. The temporal evolution of θ is modeled as a random walk, θₜ₊₁=θₜ+wₜ, with process noise covariance Q. Two measurement models are defined: (1) a direct CTD measurement y_Lₜ = c(pₜ;θ)+e_Lₜ, and (2) a TL measurement y_TLₜ = f(c(·;θ),pₜ)+e_TLₜ, where f(·) denotes a full‑wave acoustic propagation model (Bellhop in the simulations). Both measurement noises are assumed Gaussian.
Because the TL model is highly nonlinear, the authors employ an Unscented Kalman Filter (UKF) to perform sequential Bayesian estimation of θ. The UKF generates sigma points, propagates them through the combined measurement function h(θ,p) =
Comments & Academic Discussion
Loading comments...
Leave a Comment