A Generalized Voronoi Graph based Coverage Control Approach for Non-Convex Environment
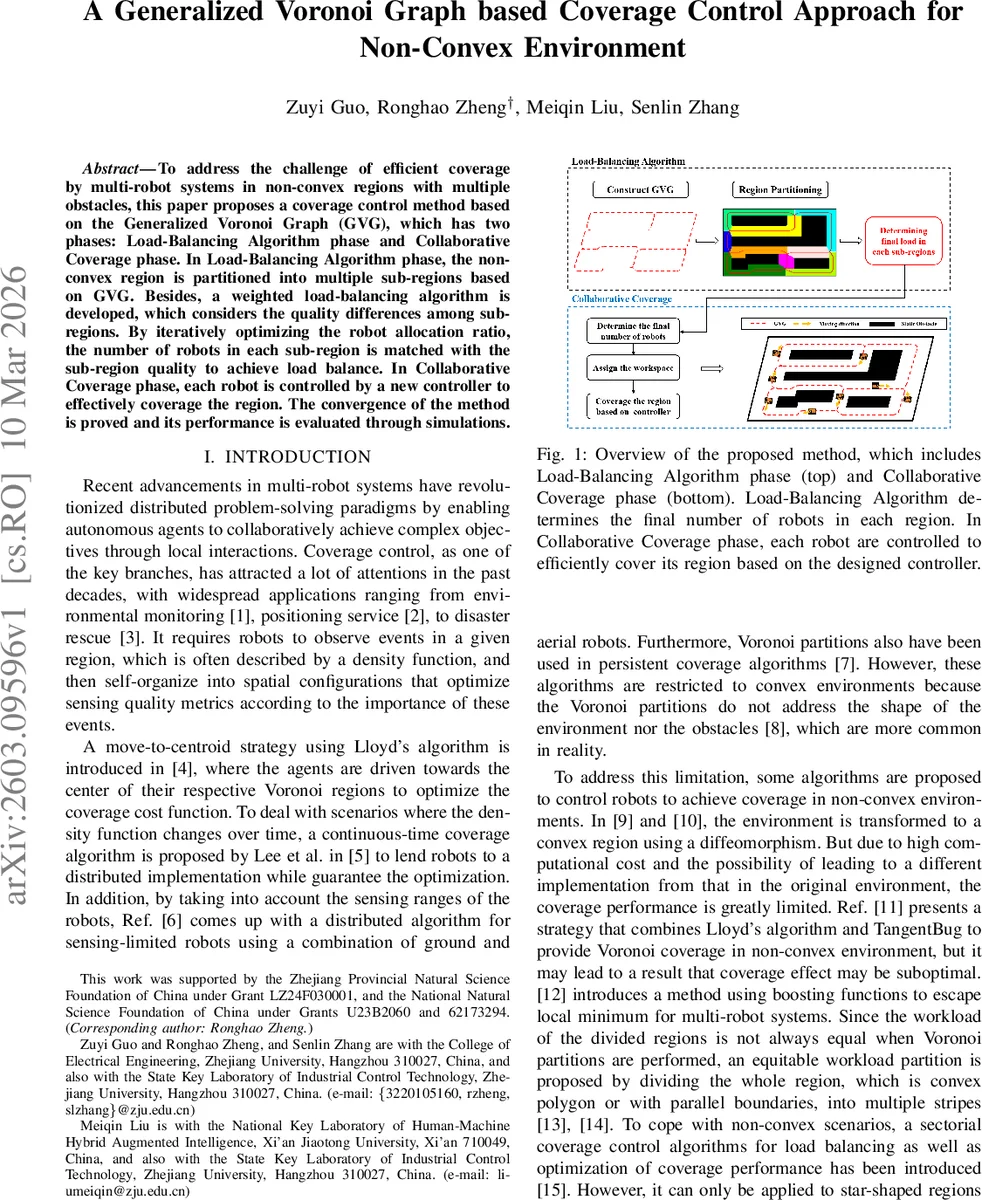
To address the challenge of efficient coverage by multi-robot systems in non-convex regions with multiple obstacles, this paper proposes a coverage control method based on the Generalized Voronoi Graph (GVG), which has two phases: Load-Balancing Algorithm phase and Collaborative Coverage phase. In Load-Balancing Algorithm phase, the non-convex region is partitioned into multiple sub-regions based on GVG. Besides, a weighted load-balancing algorithm is developed, which considers the quality differences among sub-regions. By iteratively optimizing the robot allocation ratio, the number of robots in each sub-region is matched with the sub-region quality to achieve load balance. In Collaborative Coverage phase, each robot is controlled by a new controller to effectively coverage the region. The convergence of the method is proved and its performance is evaluated through simulations.
💡 Research Summary
This paper tackles the problem of efficiently covering a non‑convex environment that contains multiple static obstacles using a team of autonomous robots. The authors propose a two‑phase framework that first partitions the environment with a Generalized Voronoi Graph (GVG) and then performs load‑balanced robot allocation followed by a collaborative coverage controller within each partition.
Phase 1 – Load‑Balancing Algorithm
The environment D ⊂ℝ² is modeled as a set of obstacles C₁,…,C_M with an outer boundary C₀. By computing the distance to each obstacle, the GVG is formed as the set of points that are equidistant to two obstacles and closer to them than to any other. The edges E_{ij} and their end‑nodes define GVG cells G_{ij}, each bounded by portions of obstacle boundaries and line segments connecting nodes to the nearest obstacles. For each cell the “mass” e_i =∫_{G_i} ϕ(q) dq is evaluated, where ϕ is a spatial density function describing the importance of sensing.
A weighted quantization consensus problem is posed: each cell i holds a load variable x_i =K_i e_i, where K_i is the (continuous) number of robots that should be assigned to that cell. Algorithm 1 iteratively equalizes loads among neighboring cells by transferring half of the load difference to the neighbor with the smallest load. After a predetermined horizon t₁, the loads converge to a common value, and the ideal (real‑valued) robot allocation for cell i is set to K_i* = e_i · x_i(t₁).
Since the actual number of robots must be integer, Algorithm 2 refines the allocation. Each cell computes the deviation c_i = K_i − ⌊K_i*⌋ and exchanges these deviations with its neighboring cells. The algorithm proceeds in three sub‑phases: (i) Offering – a cell with larger c_i offers a robot to the neighbor with the smallest c_j; (ii) Accepting – a cell that receives offers selects the neighbor with the largest c_j and sends an acceptance; (iii) Passing – upon receiving an acceptance, the offering cell transfers one robot, updating c_i and c_h. Repeating this process for a sufficient time t₂ guarantees that every c_i converges to either ⌊\bar{c}⌋ or ⌈\bar{c}⌉, where \bar{c}= (1/|E|)∑_i c_i. Theorem 1 proves asymptotic convergence of the loads, while Theorem 2 bounds the deviation of the final integer allocation from the ideal fractional allocation by S₂ = min(|E|−S₁, S₁). This provides a rigorous performance guarantee for the load‑balancing stage.
Phase 2 – Collaborative Coverage
After the robot numbers per cell are fixed, each cell runs a distributed coverage controller. For any point p on a GVG edge E_i, the set Q_i(p) consists of all points in the cell whose nearest point on E_i is p. Lemma 1 shows that the union of all Q_i(p) over p∈E_i covers the interior of the cell and that the sets Q_i(p) are mutually exclusive, forming a continuous one‑dimensional “spine” along the edge. Robots move along E_i and, at each step, head toward the nearest point on the spine that has not yet been visited. The control law \dot p_j = u_j is defined as a vector pointing from the robot’s current position to the centroid of its assigned sub‑region (or to the nearest point on the spine), scaled appropriately. A Lyapunov function representing the total coverage cost
H = Σ_i Σ_{j∈K_i} ∫_{O_j} f(p_j,q) ϕ(q) dq
is shown to be non‑increasing under this law, guaranteeing convergence to a (locally) optimal coverage configuration.
Theoretical Contributions
- Introduction of GVG as a topological tool for partitioning arbitrary non‑convex domains with multiple holes, overcoming the limitations of classic Voronoi partitions that ignore obstacles.
- Development of a weighted quantization consensus (Algorithm 1) that respects cell mass, followed by an integer‑valued load‑balancing protocol (Algorithm 2) with provable convergence and bounded deviation from the fractional optimum.
- Proof of convergence for the collaborative coverage controller using Lyapunov analysis, extending Lloyd‑type results to the GVG‑based partitioned setting.
Experimental Validation
Simulations are performed on environments containing several disjoint obstacles. The GVG partition yields cells of comparable size and mass. The weighted load‑balancing algorithm distributes robots proportionally to cell mass, leading to a substantial reduction in the coverage cost H compared with baseline methods that ignore weights or use uniform robot distribution. The collaborative controller converges faster than traditional Lloyd‑based approaches for non‑convex domains, and the final cost is lower, especially when the robot team is sufficiently large to allocate at least one robot per cell.
Limitations and Future Work
The current framework assumes static obstacles and requires a pre‑computed GVG, which may be computationally intensive for very large or dynamically changing environments. Communication is limited to immediate neighboring cells and is assumed reliable and synchronous; robustness to delays, packet loss, or asynchronous updates is not addressed. Future research directions include (i) extending the method to dynamic obstacles and online GVG updates, (ii) investigating asynchronous or event‑triggered communication schemes, (iii) reducing the computational burden of GVG construction via incremental or hierarchical methods, and (iv) validating the approach on physical robot platforms in real‑world cluttered environments.
In summary, the paper presents a novel, theoretically grounded, and practically effective solution for multi‑robot coverage in complex non‑convex spaces, combining topological partitioning, weighted load balancing, and distributed coverage control.
Comments & Academic Discussion
Loading comments...
Leave a Comment