Concentration for random Euclidean combinatorial optimization
We prove concentration bounds for random Euclidean combinatorial optimization problems with $p$--costs. For bipartite matching and for the (mono- and bi-partite) traveling salesperson problem in dimension $d\ge 3$, we obtain concentration at the natu…
Authors: Matteo D'Achille, Francesco Mattesini, Dario Trevisan
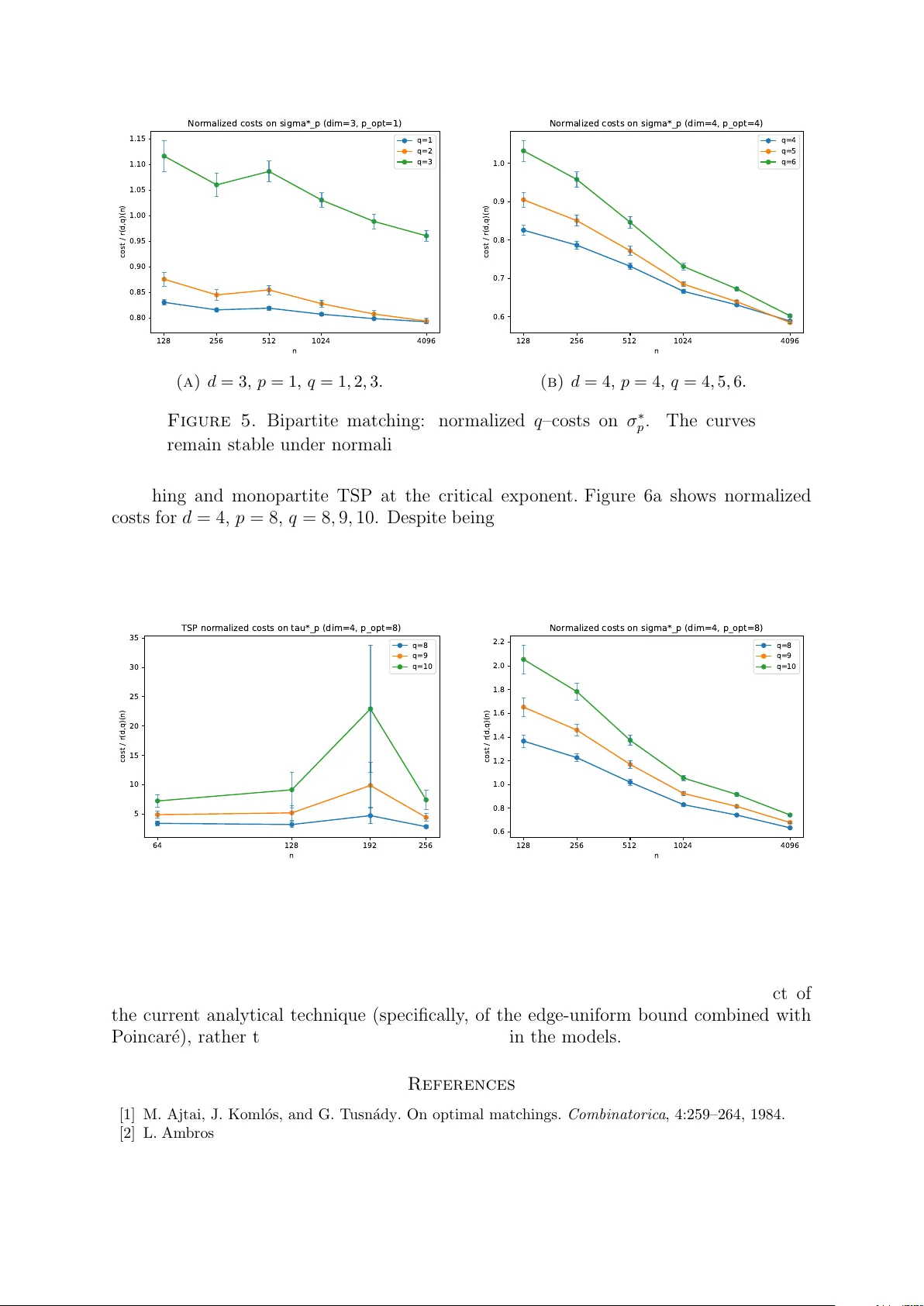
CONCENTRA TION F OR RANDOM EUCLIDEAN COMBINA TORIAL OPTIMIZA TION MA TTEO D’A CHILLE FRANCESCO MA TTESINI D ARIO TREVISAN Abstract. W e pro ve concen tration bounds for random Euclidean combinatorial op- timization problems with p –costs. F or bipartite matc hing and for the (mono- and bi- partite) tra v eling salesperson problem in dimension d ≥ 3, we obtain concentration at the natural energy scale n 1 − p/d for 1 ≤ p < d 2 / 2. Our metho d combines a Poincar ´ e inequalit y with a robust geometric mec hanism providing uniform bounds on the edges of optimizers. W e also form ulate a conjectural p → q transfer principle for the p –optimal matc hing which, if true, would extend the concentration range to all p ≥ 1. 1. Intr oduction and over view W e study concen tration prop erties for random Euclidean optimization problems built on i.i.d. uniform point clouds in the cube [0 , 1] d (with Euclidean distance). W orking in [0 , 1] d k eeps the presen tation simple; the same argumen ts extend with minor c hanges to compact d –dimensional Riemannian manifolds (with or without b oundary), provided one has the corresp onding lo cal volume gro wth and Poincar ´ e inequality for the underlying reference measure. Tw o protot ypical examples are: • Bipartite matc hing (random assignmen t). Tw o independent clouds X = ( X i ) n i =1 and Y = ( Y j ) n j =1 are matched b y a p erm utation σ , minimizing the sum of p –p o w ers of distances, where p ≥ 1 is a parameter. • Euclidean trav eling salesp erson problem (TSP). A Hamiltonian cycle is chosen on one cloud (monopartite TSP), or on tw o clouds with an alternation constrain t (bipartite TSP), minimizing the sum of p –p o w ers of edge lengths. In all these mo dels, the disorder is geometric (the random p oin ts) and the optimizer selects a lo w-energy com binatorial structure. The natural energy scale is n 1 − p/d and – p ossibly excluding dimension d = 1 and d = 2 in the bipartite case – our goal is to quan tify sample-to-sample fluctuations at that scale. 1.1. Main results and pro of strategy (informal). Our results show that, in di- mension d ≥ 3 and for 1 ≤ p < d 2 / 2, the optimal costs for matc hing and TSP are self-aver aging at the energy scale: with (p olynomially) high probability , | C − E [ C ] | ≪ n 1 − p/d . where C denotes the optimal cost. Precise statements are giv en in Theorems 2.1, 3.1, and 3.4. The argumen t consists of tw o main lay ers. (A) Analytic c onc entr ation to ol: Poinc ar ´ e ine quality. Let µ b e the uniform probabilit y measure on ([0 , 1] d ) n (monopartite problems) or on ([0 , 1] d ) 2 n (t w o-cloud problems). The tensorized P oincar ´ e inequality gives, for ev ery lo cally Lipschitz F , (1.1) V ar µ ( F ) ≤ C P E µ |∇ F | 2 . 1 CONCENTRA TION FOR RANDOM EUCLIDEAN COMBINA TORIAL OPTIMIZA TION 2 Applying (1.1) to the optimal cost C reduces concen tration to b ounding |∇C | . F or matc h- ing and TSP , at p oin ts of differentiabilit y one has gradien t b ounds of the form (1.2) |∇C | 2 ≲ X e | e | 2( p − 1) ≤ C · sup e | e | p − 2 , where the sum/sup are ov er the edges selected b y an optimizer. (B) Ge ometric input: excluding long e dges by lo c al stability. The k ey difficult y is to con trol the maximal edge length sup e | e | . The mec hanism is: (1) a mesosc opic diffuseness ev en t, ensuring that ev ery ball of radius ≳ n − α/d con tains man y p oin ts (with very high probabilit y); (2) a lo c al optimality condition: a suitable 2–opt mov e cannot decrease the cost; (3) a deterministic lemma conv erting 2–opt into a lo c al e dge-to-ener gy inequality (that w e pro v e in details for the bipartite matching, see Lemma 2.3 for matching). Com bining these ingredients yields a p ow er-la w b ound sup e | e | ≲ n − p/ ( d ( p + d )) with v ery high probabilit y , whic h closes the Poincar ´ e estimate. The exp onen t p < d 2 / 2 is exactly the condition that the resulting p olynomial tail exp onent is p ositiv e. 1.2. A conjectural p → q transfer principle. Numerical simulations (see Section A) indicate that the curren t range p < d 2 / 2 is lik ely not intrinsic. A natural strengthening w ould b e to con trol not only the maximal edge, but higher momen ts of the edge lengths under the p –optimizer. Conjecture 1.1 ( p → q transfer for the p –optimal matching) . Fix d ≥ 3 and p ≥ 1 . F or every q > p ther e exists c = c ( d, p, q ) < ∞ such that for every p –optimal matching σ p , E h n X i =1 | X i − Y σ p ( i ) | q i ≤ c n 1 − q /d . Conjecture 1.1 matches the heuristic that the p –optimizer still pairs p oints at the t ypical matching scale n − 1 /d , hence has q –energy of order n 1 − q /d for every q > p . W e notice that the case q < p is trivially true b y optimalit y of σ p and an application of H¨ older inequalit y with exp onen t p/q . If the conjecture were true (with q = 2 p − 2), it would remo v e the restriction p < d 2 / 2 in our concen tration b ounds. Similar conjectures can b e stated for TSP and bipartite TSP cases. 1.3. Related literature and con text. Random Euclidean combinatorial optimization lies at the in tersection of probabilit y , geometric measure theory , statistical ph ysics, and algorithms. The foundational results are the la w of large n um bers for Euclidean func- tionals, starting from the Beardw o od–Halton–Hammersley theorem and its extensions to broad classes of subadditiv e Euclidean functionals; see also the monographs b y Steele and Y ukich for a unified probabilistic framew ork co v ering the minim um spanning tree (MST), matc hing, TSP , and related mo dels [5, 20, 22]. On the probabilistic side, quan titativ e asymptotics and fluctuation theory for Euclidean matc hing and assignmen t problems originate in the w ork of Ajtai–Koml´ os–T usn´ ady and its subsequen t refinements via m ultiscale, F ourier, and empirical-pro cess techniques [1, 6]. Mo dern developmen ts connect these ideas to geometric probability to ols suc h as uniform o ccupancy , stabilization, and VC-t yp e arguments [19, 11] A complementary viewp oint arises from statistical physics and optimal transp ort. F or matc hing-t yp e problems, renormalization heuristics and elliptic PDE descriptions ha ve led to sharp asymptotics and robust structural results in lo w dimensions, notably through the PDE/OT approac h and subsequen t w ork [3, 15]. In particular, Prop osition 5.3 in [15] CONCENTRA TION FOR RANDOM EUCLIDEAN COMBINA TORIAL OPTIMIZA TION 3 establishes concentration under general structural assumptions using a Poincar ´ e inequal- it y , highlighting the role of sp ectral-gap metho ds in this context. F rom the algorithmic persp ective, Euclidean TSP and matching hav e long served as b enc hmarks for lo cal-impro v emen t heuristics (e.g. 2-opt and k -opt mo v es) and a verage- case analysis in computer science and operations researc h, alongside w orst-case PT AS results for geometric optimization [9, 17, 4, 18]. The presen t note con tributes to the concentration theory of these mo dels. While the use of a P oincar´ e (sp ectral gap) inequality is not new in this setting (see e.g. [15]), our contribution is to isolate a sharp and purely geometric mechanism con verting local sw ap optimality (cyclical monotonicity for matc hing, admissible 2-edge sw aps for TSP) and mesoscopic densit y in to a quan titativ e L ∞ b ound on edge lengths. This uniform edge con trol strengthens existing approaches and pro vides a direct route to subleading fluctuation b ounds without relying on in tegrable represen tations of the optimizer. 1.4. Extensions and op en problems. The mec hanism dev elop ed in this note is not sp ecific to matching or TSP , but relies only on tw o structural ingredients: (i) a lo cal sw ap (or 2–edge) optimality condition for the minimizer; (ii) mesoscopic density control of the underlying random p oin t cloud. The same strategy applies to a broad class of Euclidean com binatorial problems whose minimizers satisfy a lo cal exchange prop ert y . Examples include minimal spanning trees, k –MST, degree-constrained spanning subgraphs such as k –factors, and related matching- t yp e structures. In all these cases, optimality can b e expressed through a lo cal exc hange inequalit y , and the triangle-inequalit y argument yields a lo cal edge-to-energy comparison analogous to Lemma 2.3. Com bined with P oincar ´ e’s inequality , this leads to concen tration estimates at the natural scaling, pro vided suitable annealed b ounds are a v ailable. Although we restrict atten tion to the cub e with uniform sampling for simplicit y , the argumen t extends to substantially more general settings. If the underlying measure has a densit y ρ that is b ounded abov e and b elo w on a b ounded domain with Lipschitz b oundary , the mesoscopic density estimates remain v alid and the same pro of applies. More generally , on compact Riemannian manifolds with b ounded geometry , the argument carries o v er pro vided geo desics exist and satisfy standard triangle inequalities, volumes of geodesic balls scale like r d at small scales, and a P oincar ´ e (sp ectral gap) inequality holds for the pro duct measure. Under these mild geometric assumptions, the lo cal edge-to-energy argumen t and the Poincar ´ e reduction are unc hanged. F or simplicit y , w e also formulated concen tration using the L 2 P oincar ´ e inequality , b ounding the v ariance by the squared L 2 norm of the gradient. This yields p olynomial tail b ounds via Cheb yshev or Mark o v inequalities. Stronger tail estimates (e.g. higher p olynomial moments or sub-Gaussian behavior in suitable regimes) could b e obtained b y com bining the same geometric input with L q v ersions of the P oincar ´ e inequalit y or related functional inequalities. W e do not pursue these refinemen ts here, as our fo cus is on the geometric mechanism. The main limitation of the presen t metho d is the restriction p < d 2 / 2, whic h arises from the current p o w er-law con trol of the maximal edge length. Numerical evidence suggests that no qualitativ e c hange o ccurs at p = d 2 / 2, and that concentration at the natural scale n 1 − p/d should hold for all p ≥ 1. Establishing concentration for arbitrary p remains, in our view, the cen tral op en problem in this direction. CONCENTRA TION FOR RANDOM EUCLIDEAN COMBINA TORIAL OPTIMIZA TION 4 Organization. Section 2 prov es concentration for bipartite matching. Section 3 treats the monopartite TSP and then the bipartite TSP . App endix A presen ts numerical simu- lations supp orting Conjecture 1.1 and sho wing that the current range p < d 2 / 2 is lik ely not optimal. Ac kno wledgemen ts. M. D’A. ac kno wledges supp ort from the ANR pro ject LOUC- COUM (ANR-24-CE40-7809) and is grateful to the Department of Mathematics, Uni- v ersit y of Pisa for excellent w orking conditions in the o ccasion of the in vitation which started this pro ject (No v ember 2021). D.T. ackno wledges the MUR Excellence Depart- men t Pro ject aw arded to the Department of Mathematics, Univ ersit y of Pisa, CUP I57G22000700001, the HPC Italian National Cen tre for HPC, Big Data and Quan tum Computing - Prop osal co de CN1 CN00000013, CUP I53C22000690001, the PRIN 2022 Italian grant 2022WHZ5XH - “understanding the LEarning pro cess of QUan tum Neural net w orks (LeQun)”, CUP J53D23003890006, the pro ject G24-202 “V ariational meth- o ds for geometric and optimal matc hing problems” funded b y Univ ersit` a Italo F rancese. Researc h also partly funded by PNRR - M4C2 - In v estimen to 1.3, Partenariato Esteso PE00000013 - ”F AIR - F uture Artificial In telligence Researc h” - Spoke 1 ”Human-centered AI”, funded by the European Commission under the NextGeneration EU programme. This researc h b enefitted from the support of the FMJH Program Gaspard Monge for optimization and op erations researc h and their in teractions with data science. 2. Concentra tion f or bip ar tite ma tching Let x = ( x i ) n i =1 and y = ( y j ) n j =1 b e p oin ts in [0 , 1] d , and let p ≥ 1. The (Euclidean) bipartite matc hing cost is (2.1) C p bM ( x , y ) : = min σ ∈S n n X i =1 | x i − y σ ( i ) | p . W e use the following notational con v en tions throughout. F or a point set z = ( z i ) n i =1 and a measurable set Ω ⊆ [0 , 1] d w e write N z Ω : = # { i ∈ { 1 , . . . , n } : z i ∈ Ω } . W e denote b y B ( x, r ) the Euclidean ball in R d of center x and radius r ; when w orking in [0 , 1] d w e tacitly intersect with [0 , 1] d (this only affects b oundary balls and do es not c hange the argumen ts). In the random case x = X , y = Y , we assume that x i = X i and y j = Y j are realizations of i.i.d. random v ariables uniformly distributed on [0 , 1] d . The matching cost b ecomes a random v ariable C p bM ( X , Y ), and its annealed asymptotics are b y now standard [1, 21, 3, 10, 12]: as n → ∞ , (2.2) E [ C p bM ( X , Y )] ∼ n n − p 2 if d = 1 , log n n p 2 if d = 2 , n − p d if d ≥ 3 , where ∼ denotes asymptotic upp er and low er bounds – existence of a limit after rescaling remains op en only in d = 2, p = 2. The exceptional scaling in dimensions d = 1 and d = 2 is due to the presence of anomalously long edges in the optimal matc hing, which are not ruled out by the lo cal stabilit y mechanism describ ed ab o v e. F or this reason, w e fo cus on the case d ≥ 3. Theorem 2.1 (Concentration for bipartite matc hing) . L et d ≥ 3 and 1 ≤ p < d 2 / 2 . Then, ther e exist c onstants θ = θ ( p, d ) > 0 and C = C ( p, d ) < ∞ such that for al l n ≥ 1 CONCENTRA TION FOR RANDOM EUCLIDEAN COMBINA TORIAL OPTIMIZA TION 5 and λ > 0 , P |C p bM ( X , Y ) − E [ C p bM ( X , Y )] | ≥ λn 1 − p d ≤ C n − θ λ − 2 . 2.1. 2-opt inequalit y and lo cal edge-to energy control. Before w e provide the pro of of Theorem 2.1, w e fo cus on the key steps, describ ed informally in the previous section, that allo w to obtain a uniform con trol on edge costs, starting from a 2–opt inequality . In the case of bipartite matc hing, the optimality condition w e use is the follo wing tw o- p oin t sw ap inequalit y (a sp ecial instanc e of the cyclical monotonicit y in optimal transport theory). Lemma 2.2 (2–opt inequalit y) . L et σ b e an optimizer in (2.1) . Then for al l i, j ∈ { 1 , . . . , n } , (2.3) | x i − y σ ( i ) | p + | x j − y σ ( j ) | p ≤ | x i − y σ ( j ) | p + | x j − y σ ( i ) | p . Pr o of. Otherwise swapping σ ( i ) and σ ( j ) strictly decreases the total cost. □ W e now mak e the 2–opt condition quantitativ e b y turning it into a uniform b ound of a single edge cost by local energy . In the semi-discrete matc hing (where one cloud of p oin ts is replaced with the uniform density), this t yp e of lo cal-energy control go es back at least to [2, Lemma 4.4] and [13, Lemma 4.1]; the lemma below adapts this viewpoint to the presen t t w o-cloud setting. Lemma 2.3. F or any p > 1 , ther e exists ε = ε ( p ) > 0 and C = C ( p ) < ∞ such that the fol lowing holds. L et x = ( x i ) n i =1 , y = ( y j ) n j =1 ⊆ [0 , 1] d b e two sets of p oints, and let σ b e an optimizer for the p -c ost. F or any i ∈ { 1 , . . . , n } , set B i = B x i + y σ ( i ) 2 , ε | x i − y σ ( i ) | . Then, (2.4) N x B i | x i − y σ ( i ) | p ≤ C X x j ∈ B i | x j − y σ ( j ) | p . Pr o of of L emma 2.3. W rite z i = ( x i + y σ ( i ) ) / 2 and assume that 0 < ε < 1 / 2. Let x j ∈ B i (if B i ∩ x = ∅ then (2.4) is trivial). It suffices to sho w that (2.3) and the triangle inequalit y imply (2.5) | x i − y σ ( i ) | p ≤ C | x j − y σ ( j ) | p . Indeed, summing (2.5) o v er x j ∈ B i yields (2.4). By the triangle inequality , | x i − y σ ( j ) | ≤ | x i − z i | + | z i − x j | + | x j − y σ ( j ) | ≤ (1 + ε ) | x i − z i | + | x j − y σ ( j ) | , (2.6) | x j − y σ ( i ) | ≤ | x j − z i | + | z i − y σ ( i ) | ≤ (1 + ε ) | x i − z i | . (2.7) Using the inequality ( a + b ) p ≤ (1 + η ) a p + C η ,p b p with η > 0 small, together with (2.3), (2.6) and (2.7), we obtain | x i − y σ ( i ) | p + | x j − y σ ( j ) | p ≤ (2 + η )(1 + ε ) p | x i − z i | p + C | x j − y σ ( j ) | p . Since | x i − z i | = 1 2 | x i − y σ ( i ) | , c ho osing ε = ε ( p ) (and then η = η ( p )) so that 1 − (2 + η )(1 + ε ) p 2 − p > 0, w e can rearrange to get (2.5). □ CONCENTRA TION FOR RANDOM EUCLIDEAN COMBINA TORIAL OPTIMIZA TION 6 x i y σ ( i ) z i ε | x i − y σ ( i ) | x j y σ ( j ) Figure 1. Lo cal geometry used in Lemma 2.3. 2.2. Pro of of Theorem 2.1. As already remarked, the case p < d can b e dealt with a simpler argument and is essentially co vered in [15, Prop osition 5.3]. F or this reason, we fo cus only on the case p ≥ d here. Pr o of. Step 1. W e argue that (2.8) P |C p bM ( X , Y ) − E [ C p bM ( X , Y )] | ≥ λn 1 − p d ≲ d,p λ − 2 n p d − 1 E sup i | X i − Y σ ( i ) | 2( p − 2) 1 2 , where σ is an optimizer. Indeed, for p ≥ 1 the map ( x , y ) 7→ C p bM ( x , y ) is Lipsc hitz and at p oin ts of differentiabilit y (see e.g. the pro of of [15, Prop osition 5.3]), ∇ x i C p bM = p | x i − Y σ ( i ) | p − 2 ( x i − y σ ( i ) ) , ∇ y j C p bM = p | x σ − 1 ( j ) − y j | p − 2 ( x σ − 1 ( j ) − y j ) . Th us, (2.9) |∇C p bM ( x , y ) | 2 ≲ n X i =1 | x i − y σ ( i ) | 2( p − 1) ≤ C p bM ( x , y ) sup i | x i − y σ ( i ) | p − 2 . The Cauc h y-Sc hw arz inequalit y giv es ( C p bM ( x , y )) 2 ≤ n C 2 p bM ( x , y ) so that E C p bM ( X , Y ) sup i | x i − y σ ( i ) | p − 2 ≤ n 1 2 E C 2 p bM ( X , Y )) 2 1 2 E sup i | X i − Y σ ( i ) | 2( p − 2) 1 2 ≲ d,p n 1 2 + ( 1 − 2 p d ) 1 2 E sup i | X i − Y σ ( i ) | 2( p − 2) 1 2 , b y (2.2) with exp onen t 2 p . Com bining Mark o v’s inequalit y and the Poincar ´ e inequalit y yields (2.8). Step 2. W e use Lemma 2.3 to con trol the maximal matc hing edge. Step 2.1. (Go o d even ts) Fix α ∈ (0 , 1) and set A : = n ∀ x ∈ [0 , 1] d , ∀ r > n − α/d : N X B ( x,r ) ≥ nr d 2 o . Then for every β > 0, as n → ∞ , it holds see for instance [16, eq. (2.52)] for the Poisson case, the pro of b eing analogous in the case of i.i.d. distributed p oints) (2.10) P ( A c ) ≲ d,α,β n − β . CONCENTRA TION FOR RANDOM EUCLIDEAN COMBINA TORIAL OPTIMIZA TION 7 Fix α ′ ∈ (0 , 1) and set B : = {C p bM ( X , Y ) ≤ n 1 − α ′ p/d } . Then for every β > 0, as n → ∞ , (2.11) P ( B c ) ≲ d,p,α ′ ,β n − β . Indeed, b y Mark o v and (2.2), for any q > 1, P ( C p bM > n 1 − α ′ p/d ) ≤ E [( C p bM ) q ] n (1 − α ′ p/d ) q ≤ n q − 1 E [ C pq bM ] n (1 − α ′ p/d ) q ≲ d,p,q n ( α ′ − 1) pq d , and c ho osing q large gives (2.11). Step 2.2. ( L ∞ b ound on the matching edges) On A ∩ B , Lemma 2.3 yields a p o w er-la w b ound on the maximal edge. Indeed, fix i and set r : = ε | X i − Y σ ( i ) | . If r ≤ n − α/d w e are done. Otherwise, on A , N X B i ≥ nr d 2 = 1 2 nε d | X i − Y σ ( i ) | d . Applying (2.4) and b ounding the lo cal cost by the global one giv es nε d | X i − Y σ ( i ) | p + d ≲ X X j ∈ B i | X j − Y σ ( j ) | p ≤ C p bM ( X , Y ) ≤ n 1 − α ′ p/d . Cho osing α , α ′ so that (2.12) α ( p + d ) = α ′ p yields, on A ∩ B , (2.13) sup i | X i − Y σ ( i ) | ≲ n − α/d . Since α ′ , α ∈ (0 , 1), condition (2.12) allows an y 0 < α < p/ ( p + d ). Step 3. Using (2.13) in (2.8) and the fact that (2.10) and (2.11) hold with arbitrarily large β (and [0 , 1] d has b ounded diameter), w e obtain E [sup i | X i − Y σ ( i ) | 2( p − 2) ] 1 2 ≲ d,p,α n − α ( p − 2) d . Hence, (2.14) P |C p bM − E [ C p bM ] | ≥ λn 1 − p d ≲ d,p,α λ − 2 n p d − 1 − α ( p − 2) d . Cho osing α arbitrarily close to p/ ( p + d ), w e see that the right hand side is infinitesimal, with a rate n − θ for a suitable θ > 0, provided that p 1 − p − 2 p + d < d, that yields exactly the condition p < d 2 / 2. □ 3. Concentra tion f or the tra veling salesperson pr oblem In this section w e argue that the to ols leading to the concentration result are flexible enough to deal with other com binatorial optimization problems, b y sho wing ho w they apply in the case of the tra v eling salesp erson problem (both for the monopartite and bipartite v ersions). CONCENTRA TION FOR RANDOM EUCLIDEAN COMBINA TORIAL OPTIMIZA TION 8 3.1. Monopartite case. Let x = ( x i ) n i =1 b e p oin ts in [0 , 1] d . W e say that a cycle τ is Hamilonian if it visits eac h v ertex. F or p ≥ 1 and a Hamiltonian cycle τ on { 1 , . . . , n } , set L p ( τ ; x ) : = n X k =1 | x τ ( k ) − x τ ( k +1) | p , τ ( n + 1) : = τ (1) , and define the optimal TSP p -cost (3.1) C p T S ( x ) : = min τ L p ( τ ; x ) . Assuming again that x i = X i and y j = Y j are realizations of i.i.d. random v ariables uniformly distributed on [0 , 1] d , upp er b ounds for T n,p are also standard [5, 20, 22]: as n → ∞ , (3.2) E [ C p T S ( X )] ∼ n 1 − p/d . Upp er b ounds in particular can b e obtained via space-filling curves heuristics. Existence of a limit after rescaling app ears to b e op en for p > d ≥ 2 (although it is claimed in [22] that the argument for p = d extends to larger exp onen ts). Differen tly from the bipartite problem, there are no exceptional scaling in dimensions d = 1 and d = 2. Theorem 3.1 (Concen tration for Euclidean TSP) . L et d ≥ 2 and 1 ≤ p < d 2 / 2 . Then, ther e exist c onstants θ = θ ( p, d ) > 0 and C = C ( p, d ) < ∞ such that for al l n ≥ 1 and λ > 0 , P |C p T S ( X ) − E [ C p T S ( X )] | ≥ λn 1 − p d ≤ C n − θ λ − 2 . The TSP analogue of (2.3) is the standard 2-opt mov e: remo v e tw o non-adjacen t edges and reconnect to obtain another Hamiltonian cycle (equiv alen tly , rev erse a segment of the tour). Global optimality implies that no impro ving 2-opt mo v e exists. Lemma 3.2 (2-opt inequality for an optimal tour) . L et τ b e an optimiser in (3.1) . Consider two e dges of the tour, ( x τ ( a ) , x τ ( a +1) ) and ( x τ ( b ) , x τ ( b +1) ) , a = b. Then the 2-opt r e c onne ction do es not de cr e ase the p –c ost, i.e. (3.3) | x τ ( a ) − x τ ( a +1) | p + | x τ ( b ) − x τ ( b +1) | p ≤ | x τ ( a ) − x τ ( b ) | p + | x τ ( a +1) − x τ ( b +1) | p . Pr o of. Perform the 2-opt mov e replacing the tw o remo v ed edges by one of the tw o admis- sible reconnections. The resulting cycle has cost at least that of τ by optimality , yielding (3.3). □ x τ ( a − 1) x τ ( a ) x τ ( a +1) x τ ( b ) x τ ( b +1) x τ ( b +2) dashed: remov ed tour edges dotted arcs: new connections Figure 2. TSP: a standard 2–opt mo v e cutting ( x τ ( a ) , x τ ( a +1) ) and ( x τ ( b ) , x τ ( b +1) ) and reconnecting ( x τ ( a ) , x τ ( b ) ), ( x τ ( a +1) , x τ ( b +1) ). The geometric ingredien t is completely analogous to the matc hing case. The only additional observ ation is that, giv en a long tour edge e i = ( x τ ( a ) , x τ ( a +1) ) and a vertex CONCENTRA TION FOR RANDOM EUCLIDEAN COMBINA TORIAL OPTIMIZA TION 9 x τ ( b ) in a small ball cen tered in the midp oin t of the edge, one can alw a ys p erform an alternating 2–opt mov e. Lemma 3.3 (Lo cal edge-to-energy control for TSP) . F or any p > 1 , ther e exist ε = ε ( p ) > 0 and C = C ( p ) < ∞ such that the fol lowing holds. L et τ b e an optimiser in (3.1) , and let e = ( x τ ( a ) , x τ ( a +1) ) b e a tour e dge. L et z e = 1 2 ( x τ ( a ) + x τ ( a +1) ) and define B e := B z e , ε | x τ ( a +1) − x τ ( a ) | . Then (3.4) N x B e | x τ ( a +1) − x τ ( a ) | p ≤ C X b : x τ ( b ) ∈ B e | x τ ( b +1) − x τ ( b ) | p . Sketch of pr o of. Fix x τ ( b ) ∈ B e and apply the 2–opt inequality (3.3) to the t w o disjoin t edges e = ( x τ ( a ) , x τ ( a +1) ) and ( x τ ( b ) , x τ ( b +1) ): | x τ ( a +1) − x τ ( a ) | p + | x τ ( b +1) − x τ ( b ) | p ≤ | x τ ( a ) − x τ ( b ) | p + | x τ ( a +1) − x τ ( b +1) | p . Since x τ ( b ) ∈ B e and z e is the midp oint of e , triangle inequalities imply | x τ ( a +1) − x τ ( b +1) | ≤ 1 2 + ε | x τ ( a +1) − x τ ( a ) | + | x τ ( b +1) − x τ ( b ) | . Using the elementary inequalit y ( u + v ) p ≤ (1 + η ) u p + C η ,p v p and c ho osing ε = ε ( p ) small enough, one obtains | x τ ( a +1) − x τ ( a ) | p ≤ C | x τ ( b +1) − x τ ( b ) | p . Summing this estimate ov er all vertices x τ ( b ) ∈ B e yields N x B e | x τ ( a +1) − x τ ( a ) | p ≤ C X b : x τ ( b ) ∈ B e | x τ ( s ( b )+1) − x τ ( s ( b )) | p . Since each tour edge has at most t wo endp oints, the righ t-hand side is b ounded (up to a factor 2) by X b : x τ ( b ) ∈ B e | x τ ( b +1) − x τ ( b ) | p , whic h giv es (3.4). □ Then, the pro of of Theorem 3.1 follo ws along the same lines of the matching problem. 3.2. Bipartite case. Let x = ( x i ) n i =1 and y = ( y j ) n j =1 b e t w o sets of p oints in [0 , 1] d . A bip artite Hamiltonian cycle is a cycle alternating b etw een x - and y -v ertices. Equiv alen tly , it can b e enco ded b y a p ermutation σ of { 1 , . . . , n } and the cycle x 1 → y σ (1) → x 2 → y σ (2) → · · · → x n → y σ ( n ) → x 1 . F or p ≥ 1, define its p –cost by L p ( σ ; x , y ) : = n X i =1 | x i − y σ ( i ) | p + | x i +1 − y σ ( i ) | p , x n +1 : = x 1 , and set (3.5) C p bT S ( x , y ) : = min σ L p ( σ ; x , y ) . CONCENTRA TION FOR RANDOM EUCLIDEAN COMBINA TORIAL OPTIMIZA TION 10 Assuming again that x i = X i and y j = Y j are realizations of i.i.d. random v ariables uniformly distributed on [0 , 1] d , the annealed asymptotics are of the same order as in the bipartite matc hing problem [8, 7, 14]: (3.6) E [ C p bT S ( X , Y )] ∼ n n − p 2 if d = 1 , log n n p 2 if d = 2 , n − p d if d ≥ 3 , and existence of a limit for the rescaled exp ected cost is kno wn in the case d = 1, d = p = 2 or d ≥ 3 and p < d . Theorem 3.4 (Concen tration for bipartite TSP) . L et d ≥ 3 and 1 ≤ p < d 2 / 2 . Then ther e exist c onstants θ = θ ( p, d ) > 0 and C = C ( p, d ) < ∞ such that for al l n ≥ 1 and λ > 0 , (3.7) P |C p bT S ( X , Y ) − E [ C p bT S ( X , Y )] | ≥ λn 1 − p d ≤ C n − θ λ − 2 . As in the monopartite case, the pro of reduces to uniform control of the maximal edge length. Giv en tw o alternating edges, there are exactly t w o wa ys to reconnect their end- p oin ts. One ma y disconnect the cycle in to tw o comp onen ts, but the other necessarily pro duces a single alternating Hamiltonian cycle (after reversing the in termediate seg- men t, as in the standard 2–opt construction). Hence at least one admissible alternating 2–opt mo v e is alw a ys a v ailable. y σ ( i − 1) x i y σ ( i ) · · · y σ ( j − 1) x j y σ ( j ) First alternating reconnection y σ ( i − 1) x i y σ ( i ) · · · y σ ( j − 1) x j y σ ( j ) Second p ossible reconnection Figure 3. Tw o p ossible reconnections. One of the t wo reconnections al- w a ys yields a single alternating cycle. Lemma 3.5 (Alternating swap inequalit y) . L et σ b e an optimizer in (3.5) . Consider two alternating e dges ( x i , y σ ( i ) ) and ( x j , y σ ( j ) ) , i = j. Then the admissible alternating r e c onne ction do es not de cr e ase the c ost. Th us the same triangle-inequality argument yields: Lemma 3.6 (Local edge-to-energy control for bipartite TSP) . F or any p > 1 , ther e exist ε = ε ( p ) > 0 and C = C ( p ) < ∞ such that for every optimizer σ and every e dge e = ( x i , y σ ( i ) ) with midp oint z e and B e = B ( z e , ε | x i − y σ ( i ) | ) , N x B e | x i − y σ ( i ) | p ≤ C X j : x j ∈ B e | x j − y σ ( j ) | p . CONCENTRA TION FOR RANDOM EUCLIDEAN COMBINA TORIAL OPTIMIZA TION 11 The proof is identical to the matc hing case. Once Lemma 3.6 is a v ailable, the argumen t for Theorem 3.4 follows verbatim as in the matching and monopartite TSP cases. Appendix A. Numerical simula tions In this section we provide n umerical evidence supp orting tw o claims: (i) the p → q transfer conjecture appears to hold empirically in both the matc hing and TSP settings; (ii) the threshold p < d 2 / 2 arises from the analytical technique rather than from an in trinsic c hange of b ehavior of the mo dels. All costs are normalized by the exp ected scaling r ( d, q )( n ) = n 1 − q /d (w e w ork in d ≥ 3), so that conv ergence to a p ositiv e constant corresp onds to the conjectured b eha vior. The co de used is freely a v ailable at the rep ository https://github.com/DarioTrevisan/ REMPF . A.1. Numerical evidence for the p → q conjecture. W e test whether, for a fixed optimizer exp onen t p , the q –cost of the p –optimal configuration scales as n 1 − q /d for q > p . Monopartite TSP. Figure 4a sho ws the normalized costs for d = 3, p = 1 and q = 1 , 2 , 3. The curv es are stable and app ear to conv erge to positive constants, supp orting the scaling prediction. 64 128 192 256 n 0.75 0.80 0.85 0.90 0.95 1.00 cost / r(d,q)(n) TSP nor malized costs on tau*_p (dim=3, p_opt=1) q=1 q=2 q=3 (a) d = 3, p = 1, q = 1 , 2 , 3. 64 128 192 256 n 1.0 1.2 1.4 1.6 1.8 cost / r(d,q)(n) TSP nor malized costs on tau*_p (dim=4, p_opt=4) q=4 q=5 q=6 (b) d = 4, p = 4, q = 4 , 5 , 6. Figure 4. Monopartite TSP: normalized q –costs on τ ∗ p . In b oth regimes, the curv es remain approximately flat after normalization b y n 1 − q /d . Bipartite matc hing. W e p erform the same exp erimen t for bipartite matching. Figure 5a corresp onds to d = 3, p = 1, q = 1 , 2 , 3. The normalized costs stabilize as n gro ws. Figure 5b sho ws the case d = 4, p = 4, q = 4 , 5 , 6. The b eha vior is again compatible with the conjectured n 1 − q /d scaling. Ov erall, in all tested regimes the normalized q –costs app ear b ounded and stable, lend- ing strong numerical supp ort to the p → q conjecture. A.2. The threshold p < d 2 / 2 is tec hnical. W e no w examine the critical case d = 4, p = 8, for which p = d 2 / 2. The analytical metho d dev elop ed abov e do es not yield concen tration at this threshold. CONCENTRA TION FOR RANDOM EUCLIDEAN COMBINA TORIAL OPTIMIZA TION 12 128 256 512 1024 4096 n 0.80 0.85 0.90 0.95 1.00 1.05 1.10 1.15 cost / r(d,q)(n) Nor malized costs on sigma*_p (dim=3, p_opt=1) q=1 q=2 q=3 (a) d = 3, p = 1, q = 1 , 2 , 3. 128 256 512 1024 4096 n 0.6 0.7 0.8 0.9 1.0 cost / r(d,q)(n) Nor malized costs on sigma*_p (dim=4, p_opt=4) q=4 q=5 q=6 (b) d = 4, p = 4, q = 4 , 5 , 6. Figure 5. Bipartite matc hing: normalized q –costs on σ ∗ p . The curv es remain stable under normalization by n 1 − q /d . Matc hing and monopartite TSP at the critical exp onen t. Figure 6a shows normalized costs for d = 4, p = 8, q = 8 , 9 , 10. Despite b eing exactly at the theoretical threshold, the normalized curves remain stable and decrease smo othly with n . Figure 6b displa ys the corresp onding matching exp eriment. Again, no qualitative c hange in b eha vior is observed at p = d 2 / 2. 64 128 192 256 n 5 10 15 20 25 30 35 cost / r(d,q)(n) TSP nor malized costs on tau*_p (dim=4, p_opt=8) q=8 q=9 q=10 (a) Monopartite TSP , d = 4, p = 8. 128 256 512 1024 4096 n 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0 2.2 cost / r(d,q)(n) Nor malized costs on sigma*_p (dim=4, p_opt=8) q=8 q=9 q=10 (b) Bipartite matching, d = 4, p = 8. Figure 6. Critical regime p = d 2 / 2 ( d = 4, p = 8). No qualitative change in b eha vior is observed at the theoretical threshold. These exp erimen ts strongly suggest that the restriction p < d 2 / 2 is an artifact of the current analytical tec hnique (specifically , of the edge-uniform b ound combined with P oincar ´ e), rather than a genuine phase transition in the mo dels. References [1] M. Ajtai, J. Koml´ os, and G. T usn´ ady. On optimal matc hings. Combinatoric a , 4:259–264, 1984. [2] L. Ambrosio, F. Glaudo, and D. T revisan. On the optimal map in the 2-dimensional random match- ing problem. Discr ete Contin. Dyn. Syst. , 39(12):7291–7308, 2019. [3] L. Ambrosio, F. Stra, and D. T revisan. A PDE approach to a 2-dimensional matching problem. Pr ob ability The ory and R elate d Fields , 173:433–477, 2019. Published online 19 F eb 2018. CONCENTRA TION FOR RANDOM EUCLIDEAN COMBINA TORIAL OPTIMIZA TION 13 [4] S. Arora. P olynomial time approximation sc hemes for Euclidean tra veling salesman and other geo- metric problems. Journal of the ACM , 45(5):753–782, 1998. [5] J. Beardw o od, J. H. Halton, and J. M. Hammersley . The shortest path through man y p oin ts. Pr o c e e dings of the Cambridge Philosophic al So ciety , 55(4):299–327, 1959. [6] S. Bobko v and M. Ledoux. A simple Fourier analytic pro of of the AKT optimal matching theorem, 2019. [7] R. Capelli, S. Caracciolo, A. Di Gioacc hino, and E. M. Malatesta. Exact v alue for the av erage optimal cost of the bipartite trav eling salesman and tw o-factor problems in tw o dimensions. Physic al R eview E , 98(3):030101, 2018. [8] S. Caracciolo, A. Di Gioacc hino, M. Gherardi, and E. M. Malatesta. Solution for a bipartite euclidean tra veling-salesman problem in one dimension. Physic al R eview E , 97(5):052109, 2018. [9] G. A. Cro es. A metho d for solving tra veling-salesman problems. Op er ations R ese ar ch , 6(6):791–812, 1958. [10] E. del Barrio, E. Gin ´ e, and C. Matr´ an. Central limit theorems for the Wasserstein distance b et w een the empirical and the true distributions. The A nnals of Pr ob ability , 27(2):1009–1071, 1999. [11] L. Devro ye and G. Lugosi. Combinatorial Metho ds in Density Estimation . Springer Series in Statis- tics. Springer, 2001. [12] N. F ournier and A. Guillin. On the rate of conv ergence in Wasserstein distance of the empirical measure. Pr ob ab. The ory R elate d Fields , 162(3-4):707–738, 2015. [13] M. Goldman and F. Otto. A v ariational pro of of partial regularit y for optimal transp ortation maps. A nn. Sci. Ec. Norm. Sup er. (4) , 53(5):1209–1233, 2020. [14] M. Goldman and D. T revisan. Con v ergence of asymptotic costs for random euclidean matc hing problems. Pr ob ability and Mathematic al Physics , 2020. [15] M. Goldman and D. T revisan. Optimal transp ort metho ds for combinatorial optimization o ver tw o random p oin t s ets. Pr ob ability The ory and R elate d Fields , 188(3):1315–1384, Apr. 2024. [16] M. Huesmann, F. Mattesini, and F. Otto. There is no stationary p-cyclically monotone Poisson matc hing in 2d. Ele ctr onic Journal of Pr ob ability , 29:1–20, 2024. [17] S. Lin and B. W. Kernighan. An effective heuristic algorithm for the tra veling-salesman problem. Op er ations R ese ar ch , 21(2):498–516, 1973. [18] J. S. B. Mitc hell. Guillotine sub divisions approximate p olygonal sub divisions: A simple PT AS for geometric TSP, k -MST, and related problems. SIAM Journal on Computing , 28(4):1298–1309, 1999. [19] M. Penrose. R andom Ge ometric Gr aphs . Oxford Studies in Probabilit y . Oxford Universit y Press, 2003. [20] J. M. Steele. Pr ob ability The ory and Combinatorial Optimization . CBMS-NSF Regional Conference Series in Applied Mathematics. SIAM, 1997. [21] M. T alagrand. Matc hing random samples in many dimensions. The Annals of Applie d Pr ob ability , 2(4):846–856, 1992. [22] J. E. Y ukich. Pr ob ability The ory of Classic al Euclide an Optimization Pr oblems , v olume 1675 of L e ctur e Notes in Mathematics . Springer, 1998. (MA TTEO D’ACHILLE) INSTITUT ´ ELIE CAR T AN DE LORRAINE, CNRS, UNIVERSIT ´ E DE LORRAINE, F-57070, METZ, FRANCE Email addr ess : MATTEO.D-ACHILLE@UNIV-LORRAINE.FR (FRANCESCO MA TTESINI) Email addr ess : MATTESINI.FRANCESCO@GMAIL.COM (D ARIO TREVISAN) UNIVERSIT ` A DI PISA, IT AL Y Email addr ess : DARIO.TREVISAN@UNIPI.IT
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment