Neural Implicit Action Fields: From Discrete Waypoints to Continuous Functions for Vision-Language-Action Models
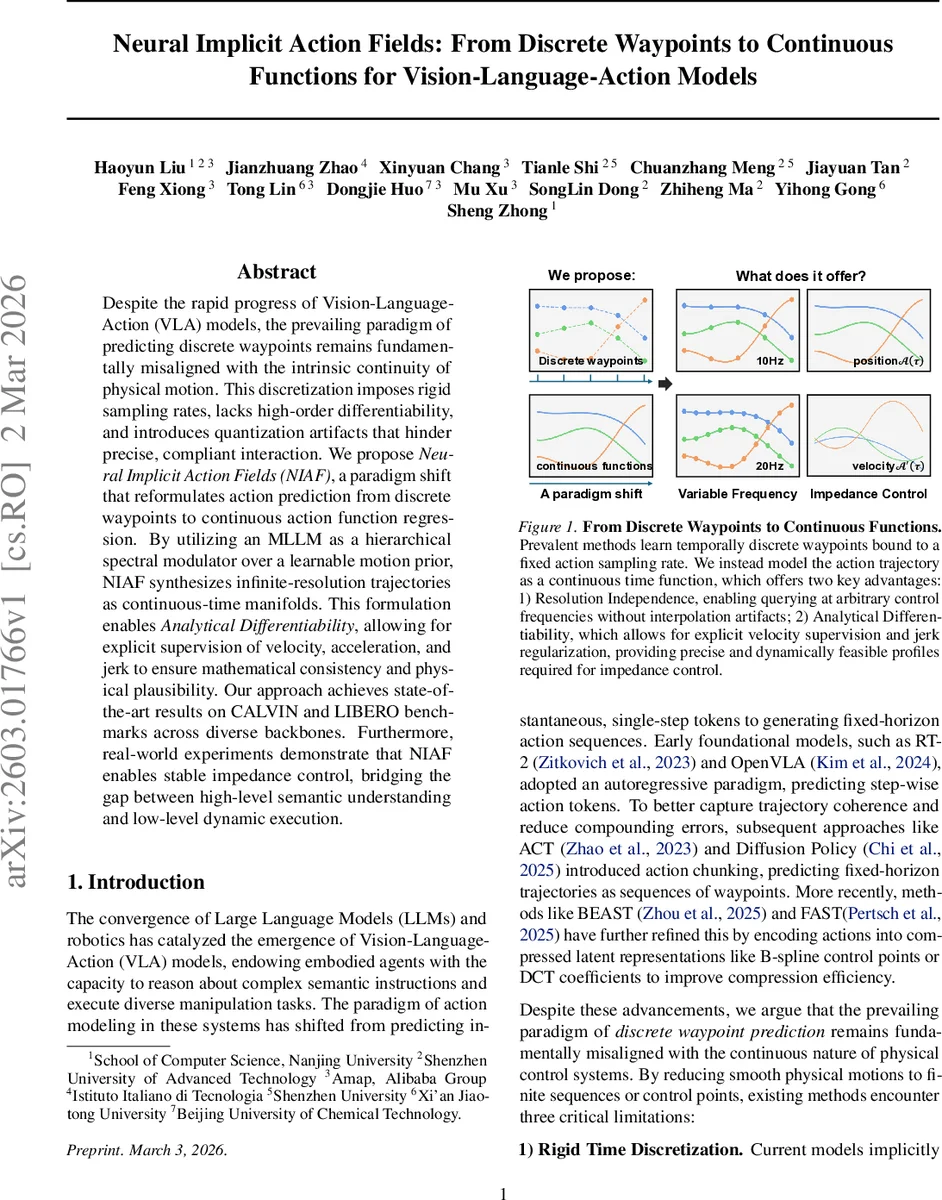
Despite the rapid progress of Vision-Language-Action (VLA) models, the prevailing paradigm of predicting discrete waypoints remains fundamentally misaligned with the intrinsic continuity of physical motion. This discretization imposes rigid sampling rates, lacks high-order differentiability, and introduces quantization artifacts that hinder precise, compliant interaction. We propose Neural Implicit Action Fields (NIAF), a paradigm shift that reformulates action prediction from discrete waypoints to continuous action function regression. By utilizing an MLLM as a hierarchical spectral modulator over a learnable motion prior, NIAF synthesizes infinite-resolution trajectories as continuous-time manifolds. This formulation enables analytical differentiability, allowing for explicit supervision of velocity, acceleration, and jerk to ensure mathematical consistency and physical plausibility. Our approach achieves state-of-the-art results on CALVIN and LIBERO benchmarks across diverse backbones. Furthermore, real-world experiments demonstrate that NIAF enables stable impedance control, bridging the gap between high-level semantic understanding and low-level dynamic execution.
💡 Research Summary
The paper introduces Neural Implicit Action Fields (NIAF), a novel framework that replaces the traditional discrete‑waypoint representation used in Vision‑Language‑Action (VLA) models with a continuous‑time action function. Existing VLA systems predict fixed‑frequency position sequences (e.g., 10 Hz or 20 Hz) and rely on numerical differentiation to obtain velocity, acceleration, or jerk, which introduces quantization noise, limits resolution, and makes it difficult to integrate with impedance or other high‑performance controllers.
NIAF formulates an action chunk as a smooth mapping A(τ)=Φ(τ;θ), where τ∈
Comments & Academic Discussion
Loading comments...
Leave a Comment