Learning Lagrangian Interaction Dynamics with Sampling-Based Model Order Reduction
Simulating physical systems governed by Lagrangian dynamics often entails solving partial differential equations (PDEs) over high-resolution spatial domains, leading to significant computational expense. Reduced-order modeling (ROM) mitigates this cost by evolving low-dimensional latent representations of the underlying system. While neural ROMs enable querying solutions from latent states at arbitrary spatial points, their latent states typically represent the global domain and struggle to capture localized, highly dynamic behaviors such as fluids. We propose a sampling-based reduction framework that evolves Lagrangian systems directly in physical space over the particles themselves, reducing the number of active degrees of freedom via data-driven neural PDE operators. To enable querying at arbitrary spatial locations, we introduce a learnable kernel parameterization that uses local spatial information from time-evolved sample particles to infer the underlying solution manifold. Empirically, our approach achieves a 6.6x to 32x reduction in input dimensionality while maintaining high-fidelity evaluations across diverse Lagrangian regimes, including fluid flows, granular media, and elastoplastic dynamics. We refer to this framework as GIOROM (Geometry-Informed Reduced-Order Modeling). All code and data are available at: https://github.com/HrishikeshVish/GIOROM
💡 Research Summary
The paper introduces GIOROM (Geometry‑Informed Reduced‑Order Modeling), a novel framework for accelerating simulations of Lagrangian particle systems. Traditional reduced‑order models (ROMs) compress high‑dimensional fields into a global latent vector, evolve this low‑dimensional state with a reduced dynamical system, and finally decode the full field. While effective for many problems, such global bases struggle with highly localized, fast‑changing dynamics (e.g., fluids) and often require explicit knowledge of the governing PDE for time‑stepping, limiting their applicability to data‑driven settings.
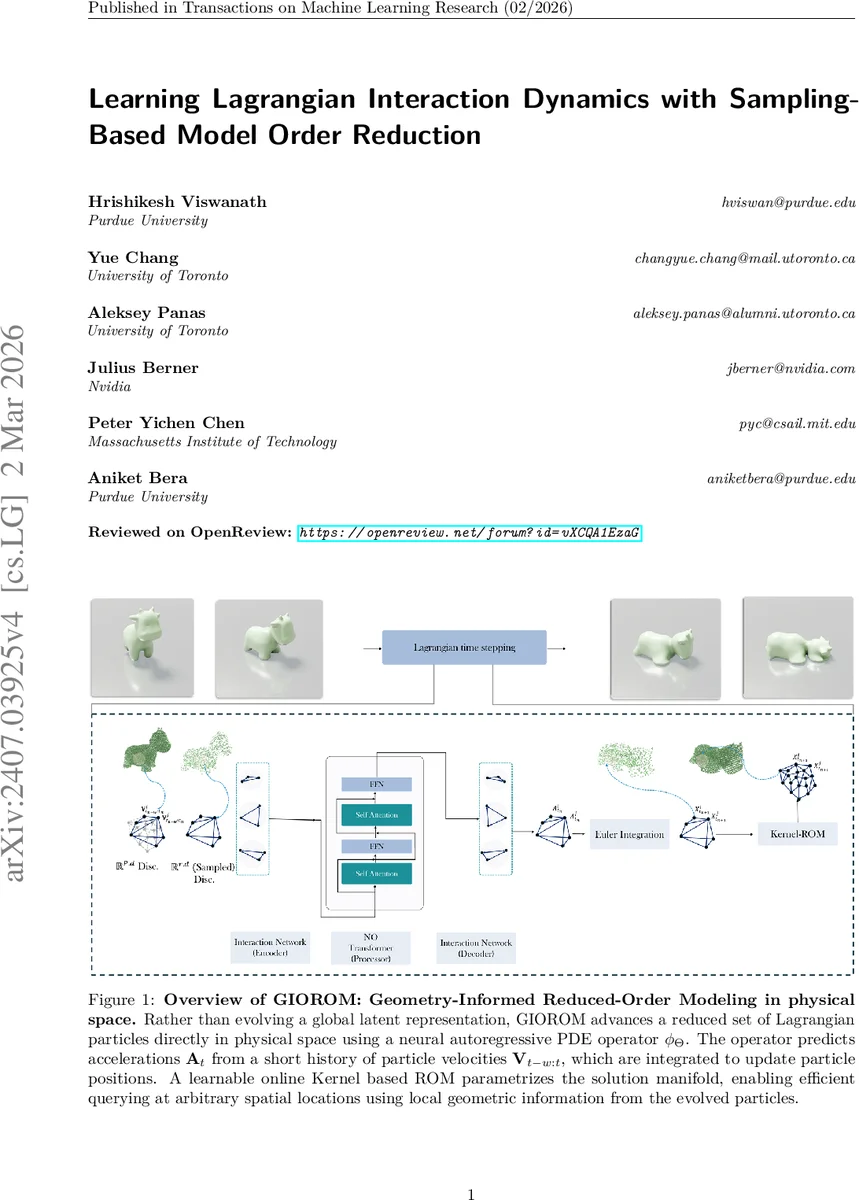
GIOROM departs from this paradigm in two key ways. First, it performs “sampling‑based reduction”: instead of projecting the entire field onto a global basis, a small set of representative particles (r ≪ N, where N is the total number of degrees of freedom) is selected. These particles evolve directly in physical space using a neural autoregressive PDE operator ϕΘ. The operator consumes a short history of particle velocities and predicts accelerations, which are integrated to update positions and velocities. ϕΘ can be instantiated with any modern neural physics architecture—graph neural networks (e.g., GNS, MeshGraphNet), transformer‑based operators, or Fourier Neural Operators—making the approach agnostic to the underlying discretization.
Second, GIOROM introduces a learnable kernel‑integral ROM to reconstruct the continuous solution at arbitrary query points. Given the current particle states v(y, t), a kernel ψ(x, y) produces a normalized weighted average:
u(x, t) = ∫Ω ψ(x, y) v(y, t) dμ(y) / ∫Ω ψ(x, y) dμ(y).
The kernel is trained to satisfy a partition‑of‑unity condition, ensuring consistency under uniform fields and providing spatial adaptivity: only particles in the local support of x contribute, preserving locality and enabling accurate capture of high‑frequency phenomena. To avoid the O(r) cost of naïve kernel evaluation, the authors project particles onto a fixed trilinear grid, forming a density field D_grid and a feature field F_grid. Query reconstruction then uses stochastic interpolation of these grid fields, effectively turning the kernel integral into a cheap expectation over random offsets. This projection‑stochastic strategy scales with grid resolution rather than particle count, allowing real‑time inference even for high‑resolution 3‑D simulations.
The authors evaluate GIOROM on a diverse suite of Lagrangian dynamics: incompressible fluid flows, granular media, and elastoplastic deformation. Across all tasks, GIOROM achieves a 6.6×–32× reduction in input dimensionality while maintaining L2 errors within 1–2 % of full‑order solutions. Compared to POD‑based ROMs, neural‑field ROMs, and operator‑based methods such as DeepONet or FNO, GIOROM excels in (1) preserving local dynamics, (2) being fully data‑driven (no explicit PDE required), and (3) being discretization‑agnostic (works on irregular meshes and point clouds). Ablation studies confirm that both the particle‑space evolution and the kernel‑integral reconstruction are essential for the observed performance gains.
From a theoretical standpoint, the paper formalizes the kernel‑integral ROM as a continuous analogue of kernel regression or Nadaraya–Watson estimation, but with a learned, physics‑aware kernel that adapts to the evolving particle geometry. The partition‑of‑unity normalization guarantees that the operator behaves like a proper integral transform, while the stochastic grid projection provides unbiased, low‑variance estimates of the integral.
In summary, GIOROM bridges neural reduced‑order modeling, neural Lagrangian solvers, and neural operators into a unified, fully data‑driven framework. By evolving a sparse set of particles directly in physical space and reconstructing fields through a learnable, locally adaptive kernel, it delivers substantial computational savings without sacrificing fidelity. The method’s modularity, discretization invariance, and ability to handle arbitrary query points make it a promising tool for real‑time physics, digital twins, and large‑scale engineering simulations. All code and datasets are publicly released at the provided GitHub repository.
Comments & Academic Discussion
Loading comments...
Leave a Comment