Validation of Space Robotics in Underwater Environments via Disturbance Robustness Equivalency
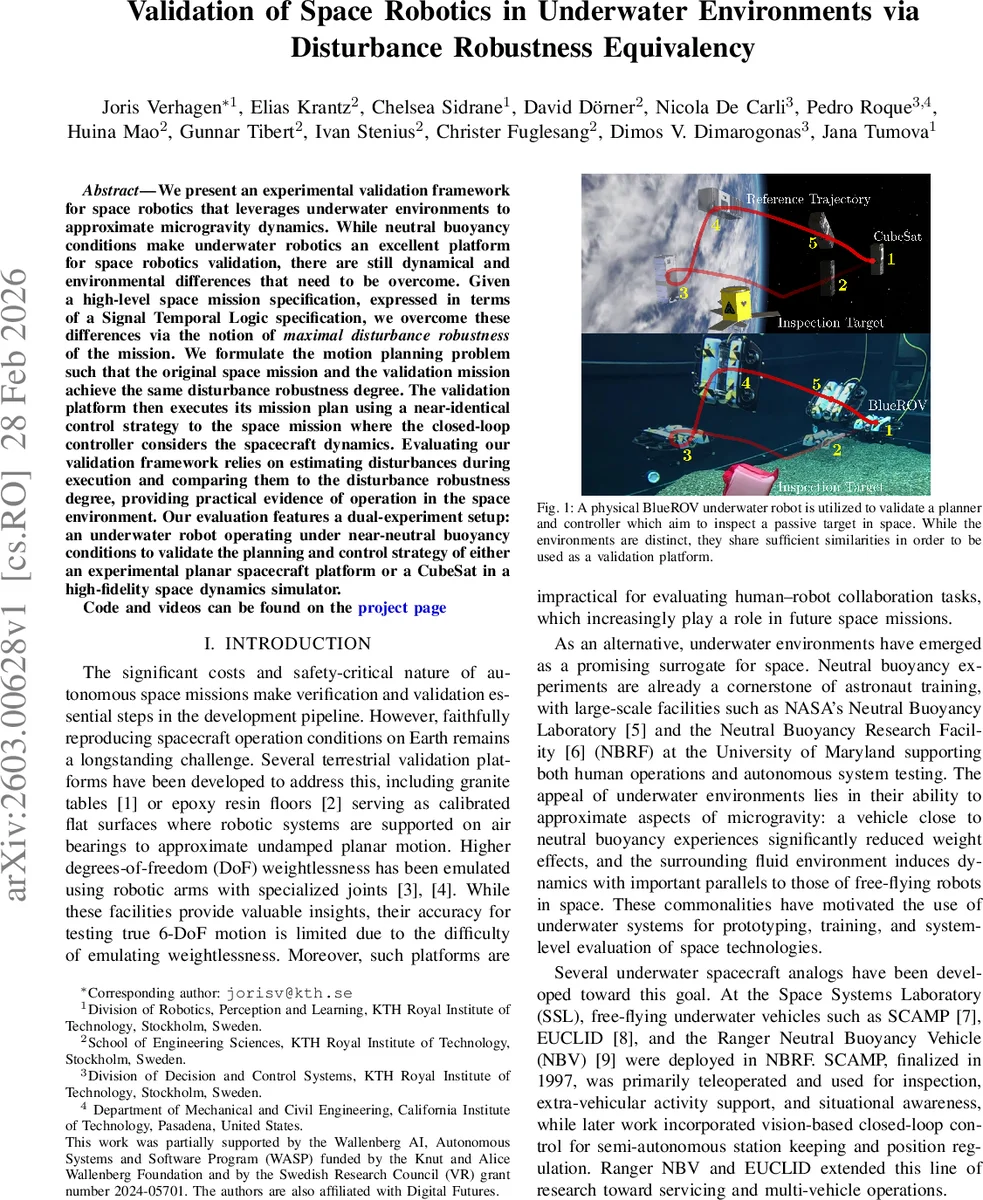
We present an experimental validation framework for space robotics that leverages underwater environments to approximate microgravity dynamics. While neutral buoyancy conditions make underwater robotics an excellent platform for space robotics validation, there are still dynamical and environmental differences that need to be overcome. Given a high-level space mission specification, expressed in terms of a Signal Temporal Logic specification, we overcome these differences via the notion of maximal disturbance robustness of the mission. We formulate the motion planning problem such that the original space mission and the validation mission achieve the same disturbance robustness degree. The validation platform then executes its mission plan using a near-identical control strategy to the space mission where the closed-loop controller considers the spacecraft dynamics. Evaluating our validation framework relies on estimating disturbances during execution and comparing them to the disturbance robustness degree, providing practical evidence of operation in the space environment. Our evaluation features a dual-experiment setup: an underwater robot operating under near-neutral buoyancy conditions to validate the planning and control strategy of either an experimental planar spacecraft platform or a CubeSat in a high-fidelity space dynamics simulator.
💡 Research Summary
**
This paper proposes a systematic framework for validating space‑robot missions by exploiting underwater environments that provide near‑neutral buoyancy, thereby approximating micro‑gravity dynamics. The authors start by expressing a high‑level mission specification in Signal Temporal Logic (STL), which offers both Boolean satisfaction and a quantitative “spatial robustness” measure that indicates how far a trajectory lies from violating the specification. To bridge the dynamical gap between space and water, they introduce the concept of disturbance‑robustness degree – the largest scaling factor α* such that, after reserving part of the control authority to counteract worst‑case disturbances, the STL specification can still be satisfied.
The planning stage uses a linearized model of the space robot (M_spL) to formulate a Mixed‑Integer Linear Program that simultaneously maximizes α* and satisfies the STL constraints. Control limits are conservatively approximated by inscribing a polytope within the rotated wrench set of the thrusters, yielding an “effective control set” U = U_nom ⊖ α K D that accounts for matched disturbances (assumed to act through the same channels as the control inputs). The optimizer returns a trajectory for the space platform together with its maximal disturbance‑robustness α*_sp.
To obtain an equivalent underwater validation mission, the STL specification is transformed (while preserving the same geometric predicates) and the planner is re‑run for the underwater robot, enforcing the same α* value. This ensures that the underwater robot must tolerate a disturbance set of identical size relative to its own dynamics, making the two missions comparable in difficulty.
On the control side, both platforms employ Model Predictive Control (MPC) with identical structure. An online disturbance estimator uses force/torque sensor data to reconstruct the external disturbance d̂. If the estimated disturbance remains within the pre‑computed admissible set D* = α*·D, the underwater execution is deemed a faithful validation of the space mission.
Experiments are conducted on two scenarios. (1) A 2‑D inspection task where a BlueROV underwater vehicle and a physical planar spacecraft analog execute the same STL‑driven trajectory. Both achieve an α* of roughly 0.45, and measured disturbances stay inside D*. (2) A 3‑D inspection task where the BlueROV is compared against a high‑fidelity CubeSat simulator. Again, α* values match (≈0.38) and the underwater robot’s hydrodynamic disturbances are successfully estimated and compensated. The results demonstrate that (i) matching disturbance‑robustness provides a quantitative bridge between the two environments, and (ii) a near‑identical control stack can be transferred from water to space without loss of performance.
The paper’s contributions are threefold: (1) a robustness‑matched planning formulation that quantifies and equalizes mission difficulty across platforms, (2) a feedback‑equivalent MPC architecture with disturbance estimation that guarantees comparable closed‑loop behavior, and (3) extensive experimental validation showing that underwater testing can reliably certify space‑robot planners and controllers. Limitations include the reliance on the “matched disturbance” assumption (which may not hold for turbulent flows), the use of a linearized planner that may introduce minor trajectory deviations when applied to the full nonlinear dynamics, and dependence on precise neutral buoyancy. Future work is suggested on handling unmatched disturbances, integrating nonlinear or learning‑based planners, and extending the methodology to multi‑robot cooperative missions.
Comments & Academic Discussion
Loading comments...
Leave a Comment