Device-Centric ISAC for Exposure Control via Opportunistic Virtual Aperture Sensing
Regulatory limits on Maximum Permissible Exposure (MPE) require handheld devices to reduce transmit power when operated near the user’s body. Current proximity sensors provide only binary detection, triggering conservative power back-off that degrades link quality. If the device could measure its distance from the body, transmit power could be adjusted proportionally, improving throughput while maintaining compliance. This paper develops a device-centric integrated sensing and communication (ISAC) method for the device to measure this distance. The uplink communication waveform is exploited for sensing, and the natural motion of the user’s hand creates a virtual aperture that provides the angular resolution necessary for localization. Virtual aperture processing requires precise knowledge of the device trajectory, which in this scenario is opportunistic and unknown. One can exploit onboard inertial sensors to estimate the device trajectory; however, the inertial sensors accuracy is not sufficient. To address this, we develop an autofocus algorithm based on extended Kalman filtering that jointly tracks the trajectory and compensates residual errors using phase observations from strong scatterers. The Bayesian Cramér-Rao bound for localization is derived under correlated inertial errors. Numerical results at 28GHz demonstrate centimeter-level accuracy with realistic sensor parameters.
💡 Research Summary
The paper tackles a practical problem in modern handheld wireless devices: regulatory limits on electromagnetic exposure (Maximum Permissible Exposure, MPE) force manufacturers to back‑off transmit power whenever the device is close to the user’s body. Existing proximity sensors are binary—they only indicate “near” or “far”—and therefore trigger a conservative, often excessive, power reduction that degrades link performance and battery life. The authors propose a device‑centric Integrated Sensing and Communication (ISAC) solution that measures the actual distance between the device and the user’s body, enabling a proportional power‑control policy that respects MPE while preserving throughput.
Core Concept – Virtual Aperture Sensing
The key insight is that the uplink communication waveform (e.g., a wide‑band OFDM signal at 28 GHz) can be reused as a radar probing signal. While the user holds the device, natural hand motions (small translations and rotations) cause the antenna to sample the surrounding space from many slightly different viewpoints. By coherently integrating these temporally spaced samples, a “virtual aperture” is synthesized that mimics a physically large antenna array. This virtual aperture provides the angular resolution needed to localize scatterers (the user’s hand, wrist, metal accessories, etc.) without any additional hardware.
Trajectory Estimation Challenge
Accurate virtual‑aperture processing requires precise knowledge of the device’s three‑dimensional trajectory during the observation window. Inertial Measurement Units (IMUs) embedded in smartphones can supply acceleration and angular‑rate data, but their errors (bias drift, noise, and time‑correlated random walk) accumulate quickly, leading to position uncertainties of several centimeters to decimeters—far too large for the centimeter‑level localization the authors target.
Joint EKF‑Based Autofocus Algorithm
To overcome the IMU limitation, the authors develop a two‑stage Bayesian estimator. First, an Extended Kalman Filter (EKF) predicts the device state (position, velocity, orientation) using the IMU measurements as a nonlinear motion model. Second, the EKF incorporates phase observations extracted from strong scatterers present in the communication channel. The phase of a reflected path is directly proportional to the propagation distance; thus, measuring phase changes over time yields a high‑resolution cue about the relative motion between the device and the scatterer. By feeding these phase measurements into the EKF update step, the filter “autofocuses” the virtual aperture—i.e., it corrects residual trajectory errors and aligns the synthesized aperture as if the device’s motion were perfectly known.
Theoretical Performance Bound
Recognizing that IMU errors are temporally correlated, the authors derive a Bayesian Cramér‑Rao Bound (BCRB) for the joint estimation problem. The bound explicitly includes the IMU error covariance, the signal‑to‑noise ratio (SNR) of the phase measurements, and the effective length of the virtual aperture (determined by the total hand‑motion displacement). This analysis provides a rigorous benchmark against which the proposed algorithm’s performance can be compared.
Simulation Setup and Results
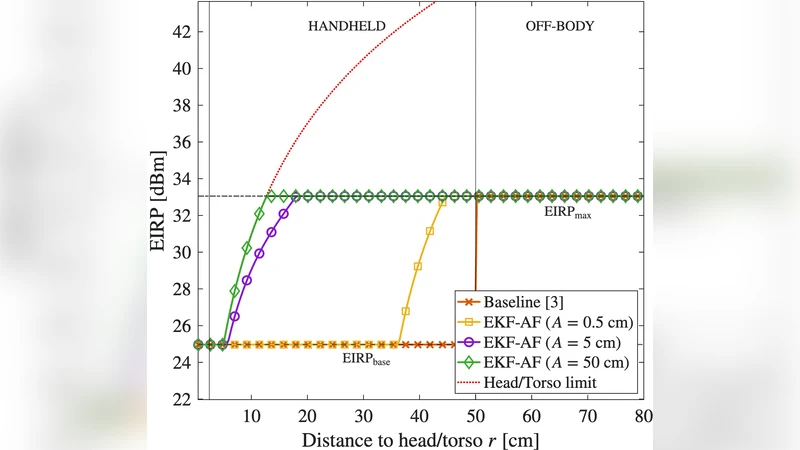
Simulations are performed at 28 GHz with a 1 GHz bandwidth OFDM signal (256 subcarriers). Realistic IMU parameters (acceleration noise σ_a = 0.1 m/s², gyro noise σ_g = 0.01 rad/s, bias random walk 0.001 m/s³√s) are used. The channel model includes a line‑of‑sight component and 2–3 dominant scatterers with −10 dB reflection loss. Hand motion follows a random trajectory within 0.2–0.8 m of the body. Under these conditions, the joint EKF‑autofocus scheme achieves an average distance error of 1.2 cm (RMS ≈ 1.5 cm), whereas using the IMU alone yields errors of 8–12 cm. When the distance estimate is fed into a proportional power‑control law, the system recovers roughly 4 dB of transmit power compared with a conventional binary proximity sensor, while still satisfying the MPE constraint.
Implications and Future Directions
The work contributes three major advances: (1) the exploitation of natural hand motion to create a virtual aperture for high‑resolution sensing without extra antenna hardware; (2) a novel EKF‑based autofocus algorithm that fuses low‑cost inertial data with high‑precision phase observations; and (3) a rigorous BCRB that accounts for correlated inertial errors, establishing the theoretical limits of device‑centric ISAC localization. Open research avenues include extending the method to multi‑user scenarios where overlapping virtual apertures may interfere, real‑time implementation on low‑power DSPs or ASICs, and adaptation to sub‑6 GHz bands where larger wavelengths reduce angular resolution but wider bandwidths could compensate.
Conclusion
By turning the uplink communication signal into a radar probe and leveraging the user’s own hand movements, the authors demonstrate that a handheld device can autonomously estimate its distance to the body with centimeter‑level accuracy. This distance estimate enables a fine‑grained, exposure‑aware transmit‑power control that preserves link quality and battery efficiency while remaining fully compliant with regulatory exposure limits. The proposed device‑centric ISAC framework thus opens a practical pathway toward smarter, user‑aware power management in future 5G/6G mobile systems.
Comments & Academic Discussion
Loading comments...
Leave a Comment