Partial Optimality in the Preordering Problem
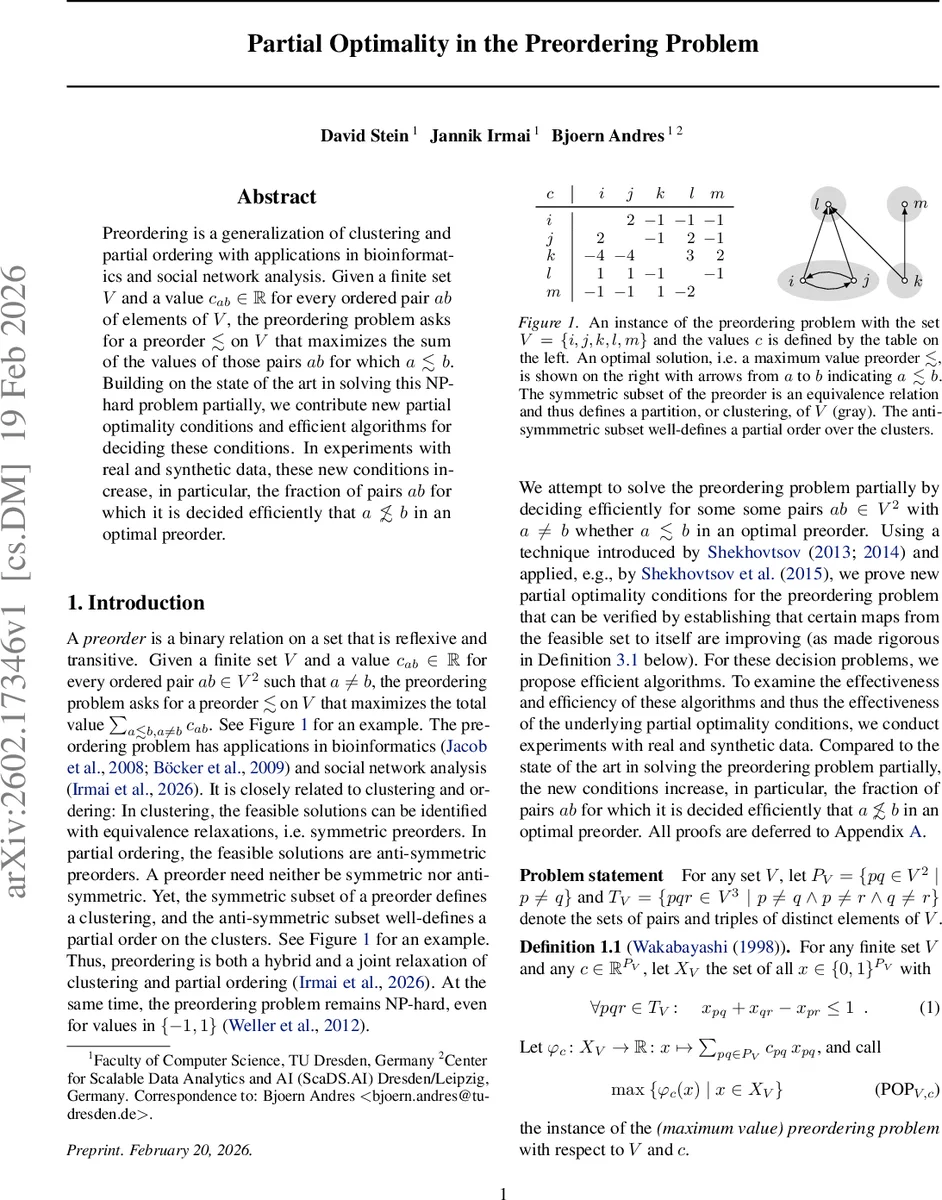
Preordering is a generalization of clustering and partial ordering with applications in bioinformatics and social network analysis. Given a finite set $V$ and a value $c_{ab} \in \mathbb{R}$ for every ordered pair $ab$ of elements of $V$, the preordering problem asks for a preorder $\lesssim$ on $V$ that maximizes the sum of the values of those pairs $ab$ for which $a \lesssim b$. Building on the state of the art in solving this NP-hard problem partially, we contribute new partial optimality conditions and efficient algorithms for deciding these conditions. In experiments with real and synthetic data, these new conditions increase, in particular, the fraction of pairs $ab$ for which it is decided efficiently that $a \not\lesssim b$ in an optimal preorder.
💡 Research Summary
The paper addresses the “preordering problem”, a combinatorial optimization task that generalizes clustering and partial ordering. Given a finite set V and a real weight c₍ab₎ for every ordered pair ab (a≠b), the goal is to find a preorder ≲ (i.e., a reflexive and transitive binary relation) that maximizes the total weight of all pairs that satisfy a ≲ b. By encoding a preorder as a 0‑1 matrix x₍pq₎ with the transitivity constraints x₍pq₎ + x₍qr₎ − x₍pr₎ ≤ 1 for all distinct p,q,r, the problem becomes the maximization of φ_c(x)=∑_{pq}c₍pq₎x₍pq₎ over the feasible set X_V. This formulation is known to be NP‑hard even when the weights are restricted to {−1, 1}.
The authors focus on partial optimality: determining, without solving the whole problem, which variables are forced to be 0 or 1 in some optimal solution. Their approach builds on the “improving map” framework introduced by Shekhovtsov. A map σ: X→X is improving if φ(σ(x)) ≥ φ(x) for all x; such a map guarantees the existence of an optimal solution that lies in the image of σ. By exploiting this principle, the authors derive sufficient conditions under which a specific variable can be fixed.
Two elementary maps are defined:
- Dicut map σ_δ(U, V\U) – sets all directed edges crossing from U to V\U to 0.
- Join map σ_{ij} – forces the edge i→j to 1 while preserving transitivity.
Both maps are shown to be well‑defined (they map feasible solutions to feasible solutions). The paper then introduces the notion of a partial characteristic function ˜x ∈ {0,1,}^{P_V}, where “” denotes an undecided pair. The closure cl_V ˜x produces the maximally specific partial assignment that is consistent with all completions of ˜x. Deciding whether a given ˜x has any completion, and computing its closure, can be done in polynomial time.
To maintain consistency with an already established partial assignment ˆx, the authors define truth of a map σ with respect to ˆx: σ must map every completion of ˆx to another completion of ˆx. They characterize the set of edges whose values may change under σ (P_{01}
Comments & Academic Discussion
Loading comments...
Leave a Comment