Stability Analysis of Geometric Control for a Canonical Class of Underactuated Aerial Vehicles with Spurious Forces
Standard geometric control relies on force-moment decoupling, an assumption that breaks down in many aerial platforms due to spurious forces naturally induced by control moments. While strategies for such coupled systems have been validated experimentally, a rigorous theoretical certification of their stability is currently missing. This work fills this gap by providing the first formal stability analysis for a generic class of floating rigid bodies subject to spurious forces. We introduce a canonical model and construct a Lyapunov-based proof establishing local exponential stability of the hovering equilibrium. Crucially, the analysis explicitly addresses the structural challenges - specifically the induced non-minimum-phase behavior - that prevent the application of standard cascade arguments.
💡 Research Summary
This paper addresses a long‑standing gap in the theory of geometric control for underactuated aerial vehicles whose translational and rotational dynamics are intrinsically coupled through so‑called spurious forces. Classical geometric controllers rely on a clean separation between thrust (force) and torque (moment) generation; however, many modern multirotor configurations—tilted propellers, fault‑induced re‑allocation, or unconventional actuator layouts—break this assumption, causing control moments to generate unavoidable translational force components. While several experimental works (e.g., Michieletto et al.) have demonstrated that a hierarchical geometric controller can still achieve stable hovering under such conditions, a rigorous stability proof has been missing.
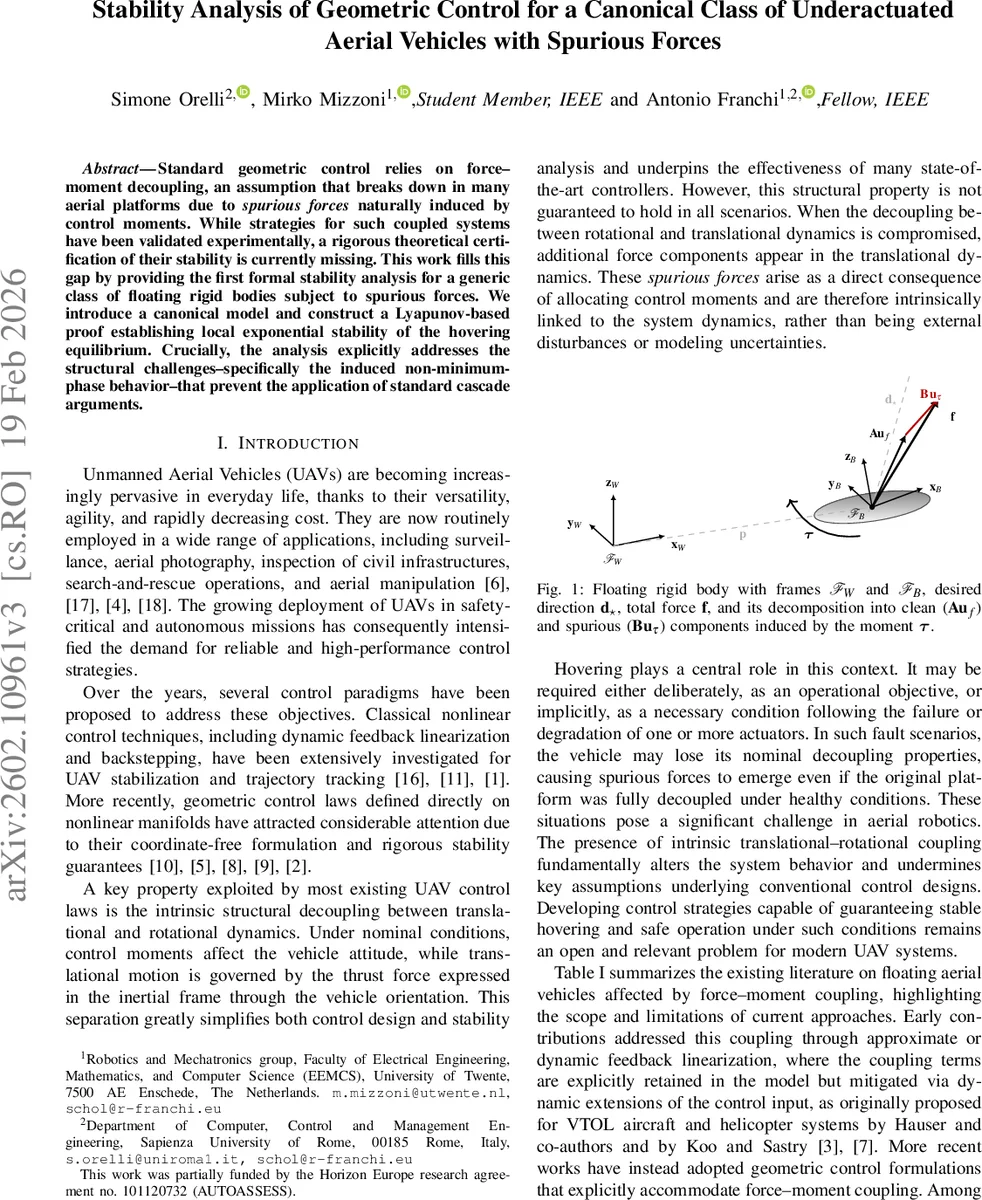
The authors first formalize a canonical model of a free‑floating rigid body acted upon by n independent inputs. The dynamics are expressed in Newton–Euler form with three allocation matrices: A (pure force), B (spurious force generated by moment inputs), and C (pure moment). Two structural assumptions are imposed: (i) full moment authority (rank C = 3) and (ii) at least one force direction that can be generated independently of the moments (rank A ≥ 1). The paper focuses on the minimally actuated case n_f = 1, n_τ = 3, which corresponds to a “partially coupled – single free direction” (PC‑D1) class. This class includes any platform with four or more total inputs that can produce thrust along a preferred direction d⋆ while the three moment inputs inevitably create a spurious force component B u_τ.
The control law reproduces the three‑layer hierarchy introduced in
Comments & Academic Discussion
Loading comments...
Leave a Comment