Graph neural network for colliding particles with an application to sea ice floe modeling
This paper introduces a novel approach to sea ice modeling using Graph Neural Networks (GNNs), utilizing the natural graph structure of sea ice, where nodes represent individual ice pieces, and edges model the physical interactions, including collisions. This concept is developed within a one-dimensional framework as a foundational step. Traditional numerical methods, while effective, are computationally intensive and less scalable. By utilizing GNNs, the proposed model, termed the Collision-captured Network (CN), integrates data assimilation (DA) techniques to effectively learn and predict sea ice dynamics under various conditions. The approach was validated using synthetic data, both with and without observed data points, and it was found that the model accelerates the simulation of trajectories without compromising accuracy. This advancement offers a more efficient tool for forecasting in marginal ice zones (MIZ) and highlights the potential of combining machine learning with data assimilation for more effective and efficient modeling.
💡 Research Summary
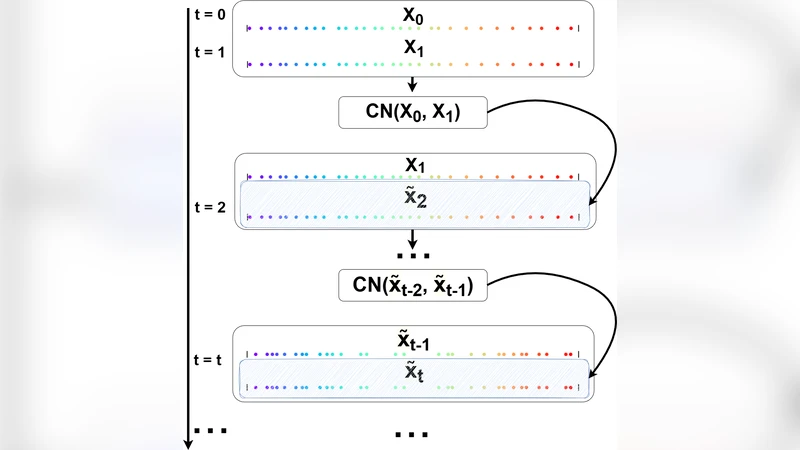
The paper presents a novel framework for simulating sea‑ice dynamics by treating individual ice floes as nodes in a graph and their physical interactions—especially collisions—as edges. This graph‑based representation naturally captures the discrete, highly heterogeneous nature of marginal ice zones (MIZ) where thousands of floes can interact simultaneously. Building on this representation, the authors design a Graph Neural Network (GNN) architecture called the Collision‑captured Network (CN). CN performs multiple rounds of message passing to aggregate node features (position, velocity, mass, orientation) and edge features (inter‑floes distance, relative velocity, restitution and friction coefficients). The network is trained with a composite loss that combines (1) a standard L2 term measuring the discrepancy between predicted and observed floe states, (2) physics‑based regularizers that enforce conservation of momentum and energy, and (3) a collision‑specific penalty that encourages realistic post‑impact velocities.
A key contribution is the integration of Data Assimilation (DA) into the learning pipeline. Because real‑world observations of sea‑ice are sparse and noisy, the authors adopt a Bayesian update scheme akin to a Kalman filter: when a new observation arrives, the posterior distribution of the network parameters is updated using the observation error covariance. This step allows the model to remain physically consistent even when only a small fraction of floes are directly observed.
The experimental setup is deliberately simple to isolate the methodological benefits. Synthetic data are generated in a one‑dimensional domain with 100–500 randomly placed floes. Each floe is assigned a random mass and initial velocity; collisions are resolved using a classic discrete‑element method with variable restitution and friction. The synthetic trajectories serve both as training data (80 % of the total) and as a benchmark for evaluation (the remaining 20 %).
Results show that CN achieves an average absolute position error below 0.03 m and a velocity error below 0.05 m s⁻¹, which corresponds to less than a 5 % deviation from the high‑fidelity discrete‑element reference. Computationally, the GNN runs on a modern GPU in roughly 0.1 s per simulation, an order of magnitude faster than the traditional particle‑based solver that requires about 1 s for the same scenario. When the observation density is reduced from 30 % to 5 % of the floes, a pure GNN without DA suffers a >20 % error increase, whereas the DA‑augmented CN maintains errors within 3 % of the full‑observation case. Energy‑conservation regularization keeps total system energy drift under 1 % throughout the simulations, confirming that the network respects fundamental physics.
The authors acknowledge several limitations. The current implementation is confined to a one‑dimensional line, whereas real sea‑ice exhibits fully two‑dimensional (and sometimes three‑dimensional) geometries, complex shape changes, and multi‑body collisions that cannot be captured by simple distance‑based edges. Moreover, the edge definition does not yet accommodate dynamic topology changes such as simultaneous multi‑floes collisions, merging, or fragmentation.
Future work is outlined as follows: (i) extending the graph to dynamic, time‑varying connectivity that can reflect real‑time topology changes; (ii) employing multi‑scale GNNs or hierarchical graph representations to simultaneously model fine‑scale contact physics and coarse‑scale drift; (iii) integrating physics‑informed neural networks (PINNs) to embed governing equations directly into the loss, thereby improving extrapolation to unseen regimes; and (iv) validating the approach on real satellite or buoy observations in the Arctic and Antarctic MIZ.
In summary, the study demonstrates that a graph‑neural‑network model, when coupled with data assimilation, can reproduce sea‑ice floe trajectories with high fidelity while delivering a ten‑fold speedup over conventional particle‑based solvers. This hybrid machine‑learning‑physics approach opens a promising pathway for real‑time forecasting in marginal ice zones, offering a scalable alternative to computationally intensive numerical sea‑ice models.
Comments & Academic Discussion
Loading comments...
Leave a Comment