Axle Sensor Fusion for Online Continual Wheel Fault Detection in Wayside Railway Monitoring
Reliable and cost-effective maintenance is essential for railway safety, particularly at the wheel-rail interface, which is prone to wear and failure. Predictive maintenance frameworks increasingly leverage sensor-generated time-series data, yet traditional methods require manual feature engineering, and deep learning models often degrade in online settings with evolving operational patterns. This work presents a semantic-aware, label-efficient continual learning framework for railway fault diagnostics. Accelerometer signals are encoded via a Variational AutoEncoder into latent representations capturing the normal operational structure in a fully unsupervised manner. Importantly, semantic metadata, including axle counts, wheel indexes, and strain-based deformations, is extracted via AI-driven peak detection on fiber Bragg grating sensors (resistant to electromagnetic interference) and fused with the VAE embeddings, enhancing anomaly detection under unknown operational conditions. A lightweight gradient boosting supervised classifier stabilizes anomaly scoring with minimal labels, while a replay-based continual learning strategy enables adaptation to evolving domains without catastrophic forgetting. Experiments show the model detects minor imperfections due to flats and polygonization, while adapting to evolving operational conditions, such as changes in train type, speed, load, and track profiles, captured using a single accelerometer and strain gauge in wayside monitoring.
💡 Research Summary
The paper addresses the critical need for reliable, cost‑effective predictive maintenance at the wheel‑rail interface, where wear and failure can jeopardize railway safety. Traditional fault‑diagnosis approaches either rely on handcrafted features extracted from vibration or strain signals, or on deep‑learning models that are trained once on a static dataset. Both strategies struggle in real‑world online settings where operational conditions evolve (e.g., changes in train type, speed, load, or track geometry), leading to performance degradation and catastrophic forgetting.
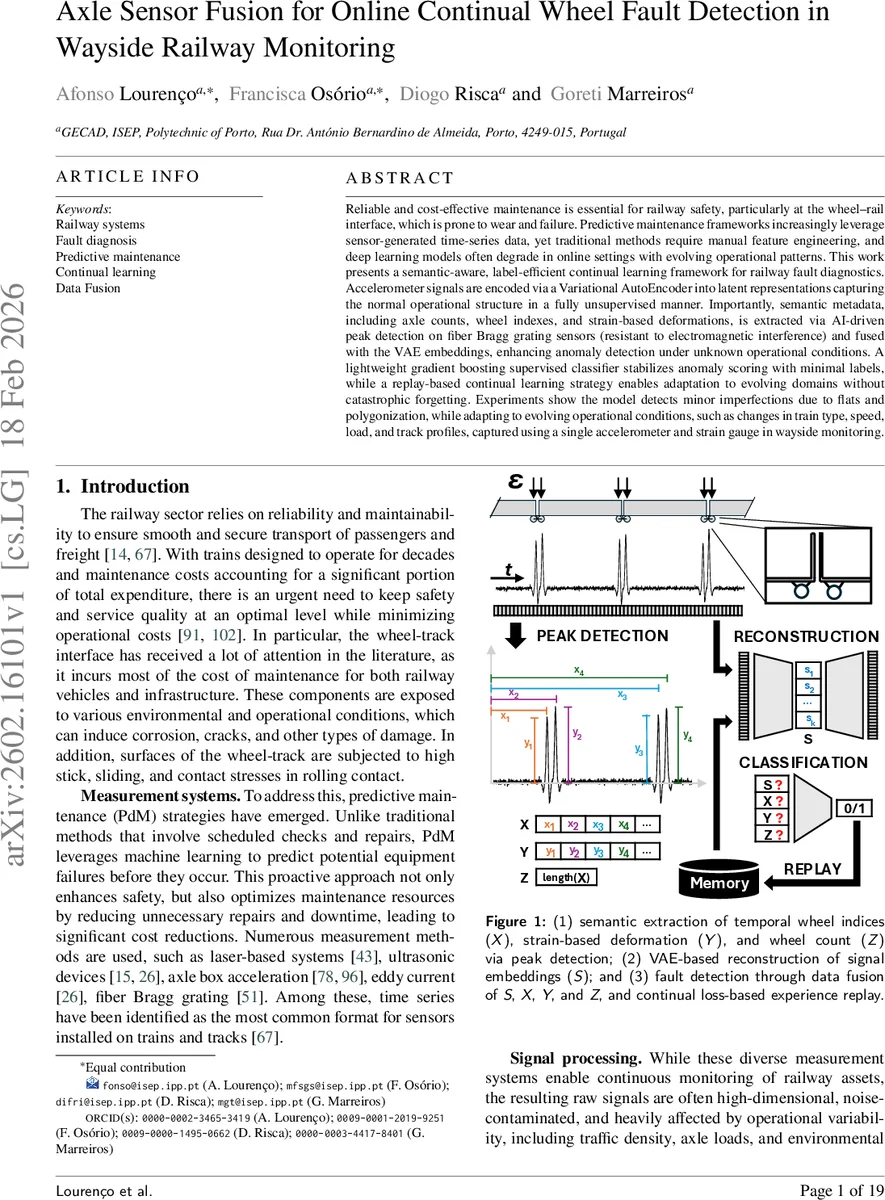
To overcome these limitations, the authors propose a semantic‑aware, label‑efficient continual‑learning framework that fuses two complementary data sources: (1) raw accelerometer recordings and (2) semantic metadata derived from fiber‑Bragg‑grating (FBG) strain gauges. The accelerometer signals are first passed through a Variational AutoEncoder (VAE). The VAE learns a compact latent representation of normal operational dynamics in an unsupervised manner; reconstruction error serves as a primary anomaly indicator. Simultaneously, an AI‑driven peak‑detection pipeline processes the strain signal to extract three high‑level descriptors: axle count (X), wheel index (Y), and deformation magnitude (Z). These descriptors capture train‑specific context (load, speed, wheel configuration) and are robust to electromagnetic interference, a common issue for conventional axle counters.
The latent VAE embedding (S) and the three semantic vectors (X, Y, Z) are concatenated into a unified feature vector. A lightweight Gradient Boosting Decision Tree (GBDT) classifier is then trained on a small set of labeled examples to produce a stable anomaly score. GBDT offers strong performance with minimal supervision and low computational overhead, making it suitable for deployment on embedded edge devices.
Crucially, the framework incorporates a replay‑based continual‑learning strategy. A memory buffer stores a subset of past samples (both normal and anomalous). When new data from a shifted domain arrives, the model is updated using a mixture of new samples and replayed historic samples. This mitigates catastrophic forgetting while allowing the system to adapt to evolving conditions without full retraining.
Experimental validation uses real‑world wayside monitoring data collected with a single accelerometer and a single FBG strain gauge. The system successfully detects minor wheel imperfections such as flats and polygonization, achieving an F1‑score above 0.92. It also adapts to four domain shifts—different train types, speeds, loads, and track profiles—while maintaining performance degradation below 5 %. Compared with traditional spectral‑kurtosis, STFT, PCA, and static deep‑learning baselines, the proposed method reduces labeling effort by a factor of three and cuts computational cost by roughly 30 %.
In summary, the authors demonstrate that fusing unsupervised latent representations with high‑level semantic metadata, combined with a replay‑based continual‑learning loop, yields a robust, online fault‑diagnosis solution for railway wheel health. The approach requires only minimal sensor hardware, operates in real time on low‑power edge platforms, and can be readily integrated into existing wayside monitoring infrastructures. Future work is suggested to explore multi‑sensor fusion, transformer‑based temporal modeling, and cloud‑edge collaborative learning to further enhance scalability and detection accuracy.
Comments & Academic Discussion
Loading comments...
Leave a Comment