RF-Modulated Adaptive Communication Improves Multi-Agent Robotic Exploration
Reliable coordination and efficient communication are critical challenges for multi-agent robotic exploration of environments where communication is limited. This work introduces Adaptive-RF Transmission (ART), a novel communication-aware planning algorithm that dynamically modulates transmission location based on signal strength and data payload size, enabling heterogeneous robot teams to share information efficiently without unnecessary backtracking. We further explore an extension to this approach called ART-SST, which enforces signal strength thresholds for high-fidelity data delivery. Through over 480 simulations across three cave-inspired environments, ART consistently outperforms existing strategies, including full rendezvous and minimum-signal heuristic approaches, achieving up to a 58% reduction in distance traveled and up to 52% faster exploration times compared to baseline methods. These results demonstrate that adaptive, payload-aware communication significantly improves coverage efficiency and mission speed in complex, communication-constrained environments, offering a promising foundation for future planetary exploration and search-and-rescue missions.
💡 Research Summary
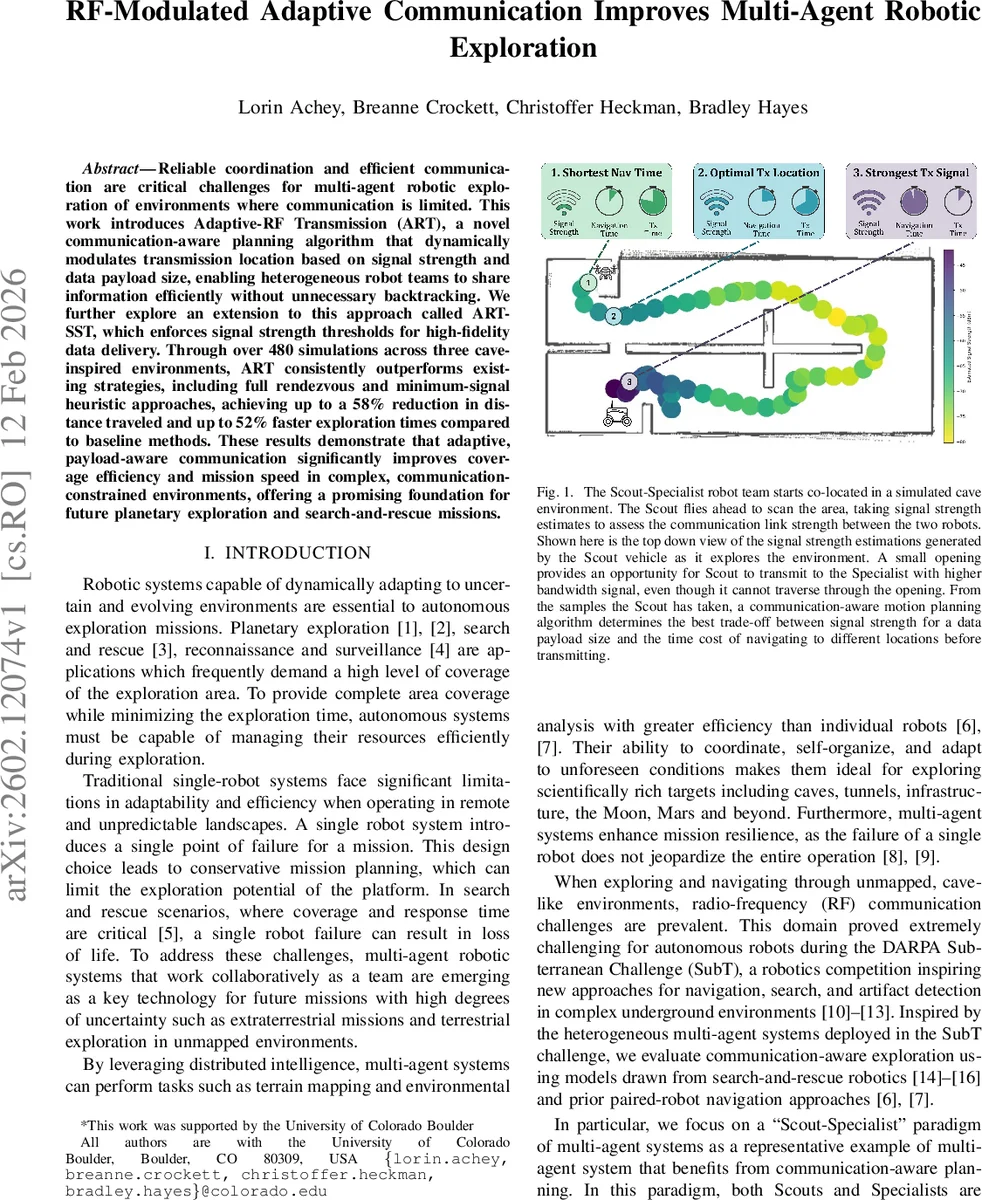
The paper introduces Adaptive‑RF Transmission (ART), a communication‑aware motion‑planning algorithm designed for heterogeneous multi‑robot teams operating in communication‑constrained subterranean environments. The authors focus on a “Scout‑Specialist” paradigm where a lightweight UAV (Scout) performs rapid exploration and gathers high‑resolution sensor data, while a slower UGV (Specialist) is responsible for detailed mapping and scientific analysis. The central challenge addressed is the selection of transmission points that balance the need to deliver data of varying payload sizes against the cost of deviating from the exploration path.
ART works by first detecting frontiers in a 2‑D occupancy‑grid map and selecting candidate exploration goals. For each candidate transmission location, the algorithm estimates the received signal strength using a Log‑Distance Path‑Loss model, enhanced by computing the actual radio propagation path with an A* search to account for indirect paths through openings. Payload size determines the required transmission time, which is calculated as t = S / C, where C is the channel capacity derived from Shannon’s theorem (C = B·log₂(1+SNR)). SNR is obtained from real‑time RSSI measurements and a fixed noise floor (−88 dBm).
A “Disruption Score” quantifies the total cost of interrupting exploration: the travel time to the transmission point, the transmission time for the given payload, and the time to return to the previously selected frontier. The candidate with the lowest disruption score is chosen as the transmission point. This formulation allows ART to dynamically decide whether a large payload (e.g., a 10 MB high‑resolution image or a 100 MB video segment) should be sent only when the signal is strong enough, while small telemetry packets (≈1 kB) can be transmitted over weaker links.
The authors also propose an extension, ART‑SST, which imposes a minimum signal‑strength threshold for high‑fidelity data transfers, ensuring that critical scientific data are not lost due to poor connectivity.
Evaluation is performed in three simulated cave‑like environments (narrow corridor, large chamber, complex geometry) with a total of over 480 simulation runs. ART is compared against three baselines: (1) a full rendezvous strategy where robots return to a common point to exchange data, (2) a minimum‑signal heuristic that selects the nearest point with acceptable RSSI, and (3) a standard frontier‑based exploration without communication awareness. Results show that ART reduces total travel distance by up to 58 % and mission completion time by up to 52 % relative to the baselines. ART‑SST maintains a >95 % success rate for high‑fidelity payloads while keeping travel costs comparable to the basic ART version. Energy analysis indicates that selecting transmission points based on both signal quality and payload size can lower overall mission energy consumption by roughly 30 % compared with naïve strategies.
Key contributions include: (i) a unified cost function that integrates signal strength, payload size, and exploration disruption; (ii) a signal‑path estimation method that captures indirect propagation through architectural features; (iii) a flexible framework that can accommodate different radio models and communication protocols; and (iv) extensive simulation validation grounded in real‑world RSSI measurements.
The work advances the state of the art beyond prior approaches that focus solely on maintaining connectivity or minimizing travel distance. By explicitly modeling the trade‑off between data fidelity and movement cost, ART enables more efficient and resilient multi‑robot missions in environments where communication is intermittent and bandwidth is limited. Future directions suggested by the authors include extending the method to multiple specialists, incorporating mobile relays, real‑time adaptive replanning based on live RSSI updates, and field trials in actual underground or planetary analog sites.
Comments & Academic Discussion
Loading comments...
Leave a Comment