Efficient Multi-Robot Motion Planning for Manifold-Constrained Manipulators by Randomized Scheduling and Informed Path Generation
Multi-robot motion planning for high degree-of-freedom manipulators in shared, constrained, and narrow spaces is a complex problem and essential for many scenarios such as construction, surgery, and more. Traditional coupled methods plan directly in the composite configuration space, which scales poorly; decoupled methods, on the other hand, plan separately for each robot but lack completeness. Hybrid methods that obtain paths from individual robots together require the enumeration of many paths before they can find valid composite solutions. This paper introduces Scheduling to Avoid Collisions (StAC), a hybrid approach that more effectively composes paths from individual robots by scheduling (adding stops and coordination motion along all paths) and generates paths that are likely to be feasible by using bidirectional feedback between the scheduler and motion planner for informed sampling. StAC uses 10 to 100 times fewer paths from the low-level planner than state-of-the-art hybrid baselines on challenging problems in manipulator cases.
💡 Research Summary
The paper tackles the challenging problem of multi‑robot motion planning (MRMP) for high‑degree‑of‑freedom manipulators that must operate simultaneously in shared, constrained, and narrow workspaces—a scenario common in construction, surgery, and other domains. Classical coupled planners search directly in the composite configuration space, but the exponential growth of dimensionality makes them impractical for such systems. Decoupled planners avoid this curse by planning each robot independently, yet they cannot guarantee collision‑free execution because inter‑robot interactions are ignored. Hybrid approaches attempt to combine the strengths of both, typically using a low‑level planner to generate individual robot paths and a high‑level scheduler to coordinate them. However, state‑of‑the‑art hybrid methods (e.g., CBSMP) explore only a single scheduling candidate at a time, which limits their ability to find feasible composites when many valid schedules exist.
The authors propose Scheduling to Avoid Collisions (StAC), a new hybrid framework that tightly couples a low‑level motion planner with a high‑level scheduler through bidirectional feedback. The key innovations are:
-
Randomized Scheduling – Instead of fixing a single order, StAC repeatedly generates random timing functions σ_i(t) that map a robot’s nominal path parameter to real time. These functions can insert stops, adjust velocities, or reorder execution segments, thereby creating a diverse set of possible temporal alignments. By exploring many schedules, the method dramatically increases the probability of finding a collision‑free coordination without exhaustive enumeration.
-
Informed Sampling via Collision Feedback – When a candidate schedule yields collisions, the collision record (the specific time intervals and robot pairs involved) is fed back to the low‑level planner. The planner then augments its sampling process with additional constraints or bias toward regions that avoid the reported conflicts. This creates a closed loop where the scheduler informs the planner what “bad” regions to avoid, and the planner supplies new candidate paths that are more likely to be compatible with future schedules.
The algorithm proceeds as follows:
- Step 1 (Low‑level path generation): Each robot a_i queries a manifold‑aware PRM (QUERYPRM) that respects its task‑space constraints f_i(q)=0, producing an initial path p_i in its individual configuration manifold M_i.
- Step 2 (Scheduling): The high‑level scheduler draws a random schedule σ_i for each robot, forming a composite execution S*.
- Step 3 (Collision checking): A fast continuous‑time collision checker evaluates S*. If no collisions are detected, S* is returned as the solution.
- Step 4 (Feedback & replanning): If collisions exist, the collision set is recorded and supplied to the low‑level planners, which then regenerate or locally modify the offending path segments. The process repeats up to a bounded number of schedule attempts (N_RA) and overall replanning attempts (N_B), guaranteeing a real‑time bound.
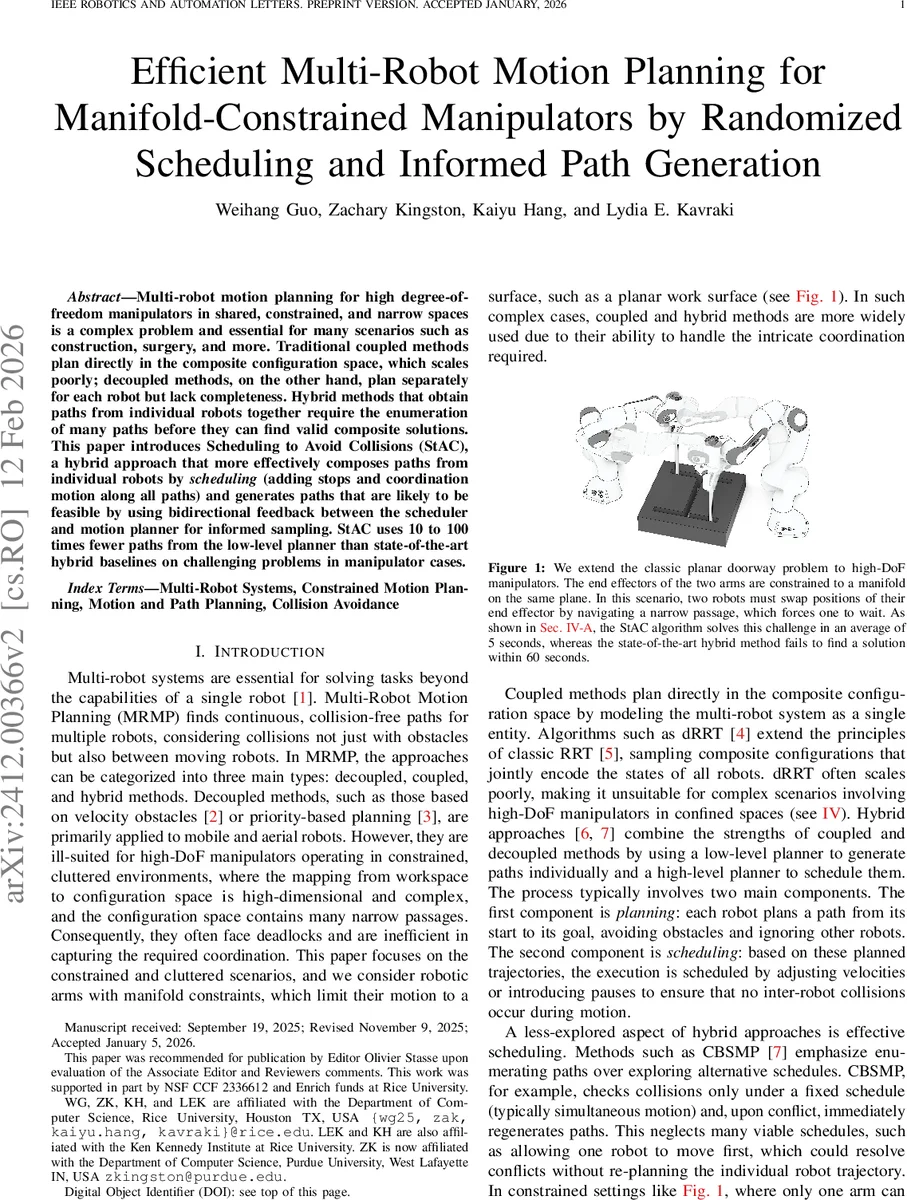
The authors evaluate StAC on four benchmark scenarios that stress different aspects of the problem: (a) two arms swapping positions through a narrow doorway, (b) multiple arms crossing in a clustered workspace, (c) a mixed 6‑DOF and 7‑DOF manipulator assembly task, and (d) a dynamic environment with moving obstacles. For each benchmark, they compare against the current best hybrid method (CBSMP) and several coupled planners. Results show that StAC finds feasible solutions in an average of 5 seconds, whereas CBSMP either fails within a 60‑second timeout or requires orders of magnitude more low‑level paths. Quantitatively, StAC consumes 10–100× fewer individual paths from the low‑level planner, leading to substantial reductions in memory usage and CPU time.
Technical contributions of the paper include:
- Demonstrating that temporal diversity (through randomized schedules) is as crucial as spatial diversity for MRMP in constrained manifolds.
- Introducing a collision‑feedback loop that transforms collision information into a constructive bias for sampling, rather than merely triggering a restart.
- Extending manifold‑constrained PRM techniques to high‑DOF manipulators and integrating them seamlessly with a continuous‑time scheduler.
- Providing a real‑time guarantee by limiting both the number of schedule generations and replanning cycles, making the approach suitable for on‑line applications.
In conclusion, StAC offers a practical, scalable solution for coordinating multiple high‑DOF manipulators in tight, shared workspaces. The paper’s experimental evidence suggests that the combination of random schedule exploration and informed low‑level sampling can overcome the curse of dimensionality that hampers traditional coupled planners. Future work is outlined to incorporate learning‑based schedule generation, extend the framework to human‑robot collaborative settings, and explore multi‑objective optimization (e.g., energy, makespan) within the same feedback architecture.
Comments & Academic Discussion
Loading comments...
Leave a Comment