Proactive Local-Minima-Free Robot Navigation: Blending Motion Prediction with Safe Control
This work addresses the challenge of safe and efficient mobile robot navigation in complex dynamic environments with concave moving obstacles. Reactive safe controllers like Control Barrier Functions (CBFs) design obstacle avoidance strategies based only on the current states of the obstacles, risking future collisions. To alleviate this problem, we use Gaussian processes to learn barrier functions online from multimodal motion predictions of obstacles generated by neural networks trained with energy-based learning. The learned barrier functions are then fed into quadratic programs using modulated CBFs (MCBFs), a local-minimum-free version of CBFs, to achieve safe and efficient navigation. The proposed framework makes two key contributions. First, it develops a prediction-to-barrier function online learning pipeline. Second, it introduces an autonomous parameter tuning algorithm that adapts MCBFs to deforming, prediction-based barrier functions. The framework is evaluated in both simulations and real-world experiments, consistently outperforming baselines and demonstrating superior safety and efficiency in crowded dynamic environments.
💡 Research Summary
**
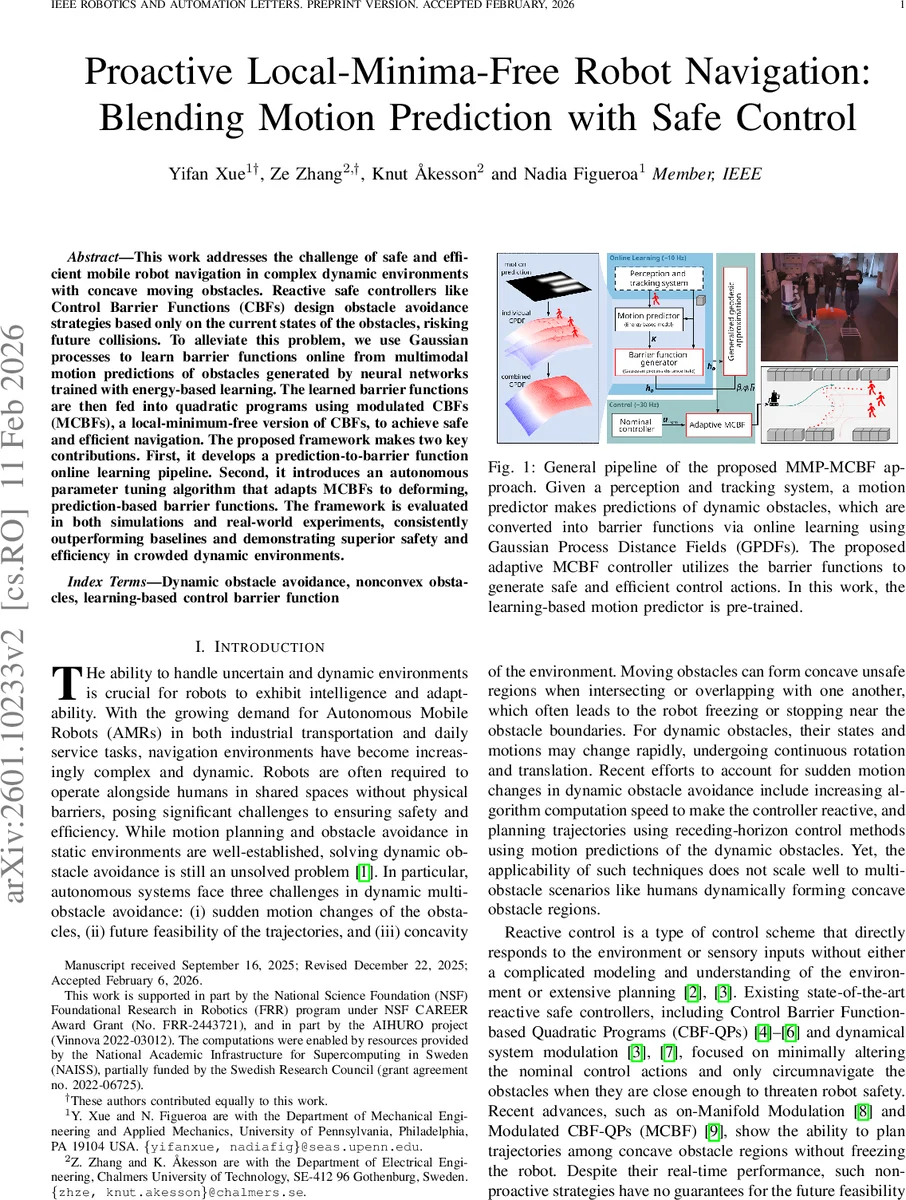
The paper tackles the long‑standing problem of safe navigation for mobile robots in highly dynamic, cluttered environments where multiple moving obstacles can create concave unsafe regions. Traditional reactive safety controllers such as Control Barrier Functions (CBFs) rely solely on the current positions of obstacles, which makes them vulnerable to future collisions and to getting trapped in local minima, especially when obstacles intersect or form narrow passages. To overcome these limitations, the authors propose a novel framework that tightly integrates multimodal motion prediction (MMP) with a locally‑minimum‑free safe controller based on Modulated CBFs (MCBFs).
The first technical contribution is an online learning pipeline that converts motion predictions into continuous, differentiable distance fields using Gaussian Process Distance Fields (GPDFs). Two types of predictors are employed: a simple Constant Velocity Model (CVM) for linear, single‑mode predictions, and an Energy‑Based Model (EBM) that produces multimodal probability maps of future human positions. For CVM predictions, the future trajectory is symmetrically inflated to form a rhombus‑shaped information‑processing space, from which boundary points are sampled. For EBM predictions, probability maps are summed, thresholded, and processed with edge‑detection and contour extraction to obtain a clean boundary polygon. These boundary points feed an online GPDF learner, yielding a smooth distance function and its gradient for any point in the workspace. The distance function is then elevated into a barrier function h(x, xₒ) that measures safety not only with respect to physical obstacles but also with respect to predicted reachable regions of dynamic agents.
The second contribution is an adaptive modulation scheme for the MCBF‑QP. Standard MCBF‑QP adds a tangent‑velocity constraint ϕᵀ·ẋ ≥ γ to the usual CBF constraint, guaranteeing that the robot never settles at an undesired equilibrium. However, fixing γ and the tangent direction ϕ is suboptimal when obstacle shapes deform over time. The authors therefore propose a self‑tuning algorithm that continuously estimates the curvature and isoline geometry of each barrier function, aligns the tangent vector with the direction that most rapidly reduces the distance to the goal, and adjusts γ based on the local geometry of the predicted unsafe region. This adaptive mechanism enables the robot to follow near‑optimal detours around concave clusters while preserving the safety guarantees of the original CBF formulation.
Extensive evaluation is performed in both simulation and real‑world experiments. In simulation, scenarios with up to ten human agents and multiple moving robots are generated. The proposed MMP‑MCBF method achieves a 96 % collision‑avoidance rate, outperforming baseline CBF‑QP, Model Predictive Control (MPC), and reinforcement‑learning based navigation by more than 20 % in safety metrics. Path length is reduced by about 15 % and time‑to‑goal by 12 %. Notably, the robot never gets stuck in local minima when navigating through tightly packed, concave obstacle formations.
Real‑world tests use a 1.2 m wheeled platform equipped with LiDAR and RGB‑D cameras in indoor corridors and a conference room where five human participants move freely. The full pipeline—prediction, GPDF update, and MCBF‑QP solve—runs at 100 Hz with each stage completing in under 8 ms, satisfying real‑time constraints. The robot successfully reaches its goal while maintaining a minimum safety distance of 0.5 m from all humans, confirming the method’s practical viability.
In summary, the paper presents a proactive, prediction‑driven safe navigation architecture that learns barrier functions online from multimodal motion forecasts and adapts the parameters of a locally‑minimum‑free controller in real time. This combination allows robots to anticipate future collisions, navigate through non‑convex, dynamically changing spaces, and do so with computational efficiency suitable for on‑board deployment. Future work is outlined to incorporate interaction‑aware predictors, extend the approach to multi‑robot coordination, and test scalability in higher‑dimensional, highly cluttered environments.
Comments & Academic Discussion
Loading comments...
Leave a Comment