Geometric Analysis of Blind User Identification for Massive MIMO Networks
Applying Nearest Convex Hull Classification (NCHC) to blind user identification in a massive Multiple Input Multiple Output (MIMO) communications system is proposed. The method is blind in the way that the Base Station (BS) only requires a training sequence containing unknown data symbols obtained from the user without further knowledge on the channel, modulation, coding or even noise power. We evaluate the algorithm under the assumption of gaussian transmit signals using the non-rigorous replica method. To facilitate the computations the existence of an Operator Valued Free Fourier Transform is postulated, which is verified by Monte Carlo simulation. The replica computations are conducted in the large but finite system by applying saddle-point integration with inverse temperature $β$ as the large parameter. The classifier accuracy is estimated by gaussian approximation through moment-matching.
💡 Research Summary
The paper proposes a novel blind user identification scheme for massive Multiple‑Input Multiple‑Output (MIMO) systems, where the base station (BS) has no prior knowledge of the channel, modulation, coding, or even the noise power. The core idea is to treat the training sequences transmitted by each user as noisy samples drawn from a high‑dimensional convex hull. By constructing the convex hull of each user’s training data and measuring the Euclidean distance of a newly received signal to each hull, the BS can decide which user (or application) the signal belongs to. This approach is called Nearest Convex Hull Classification (NCHC).
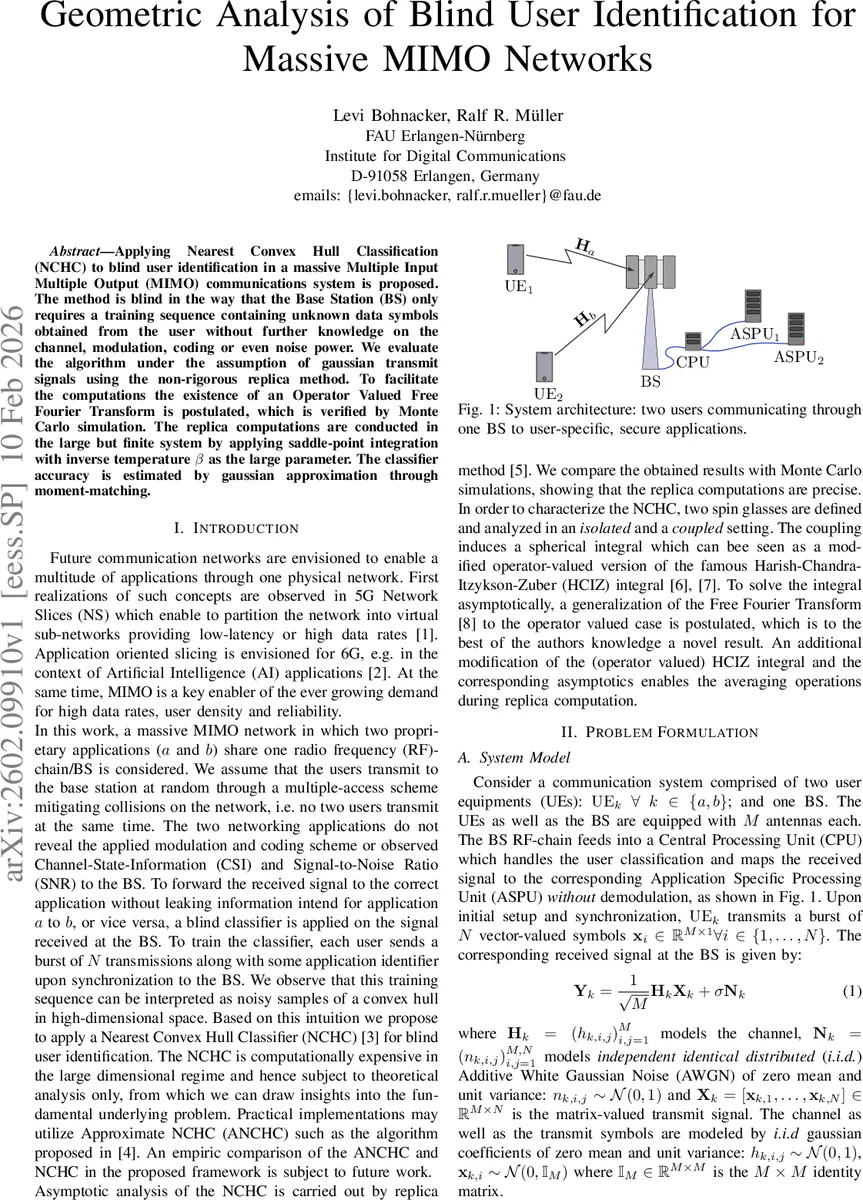
The system model consists of two single‑user equipments (UE a and UE b) each equipped with M antennas, transmitting N i.i.d. Gaussian vectors. The received training matrices are Y_k = (1/√M) H_k X_k + σ N_k, where H_k, X_k, and the noise N_k are all i.i.d. Gaussian with zero mean and unit variance. The BS only observes Y_a and Y_b and later a test vector y₀ = (1/√N) H_l x₀ + σ n₀. The convex hull of Y_k is defined as Conv(Y_k) = {∑i v_i y{k,i} | v_i∈
Comments & Academic Discussion
Loading comments...
Leave a Comment