Grouped Stirling complexes
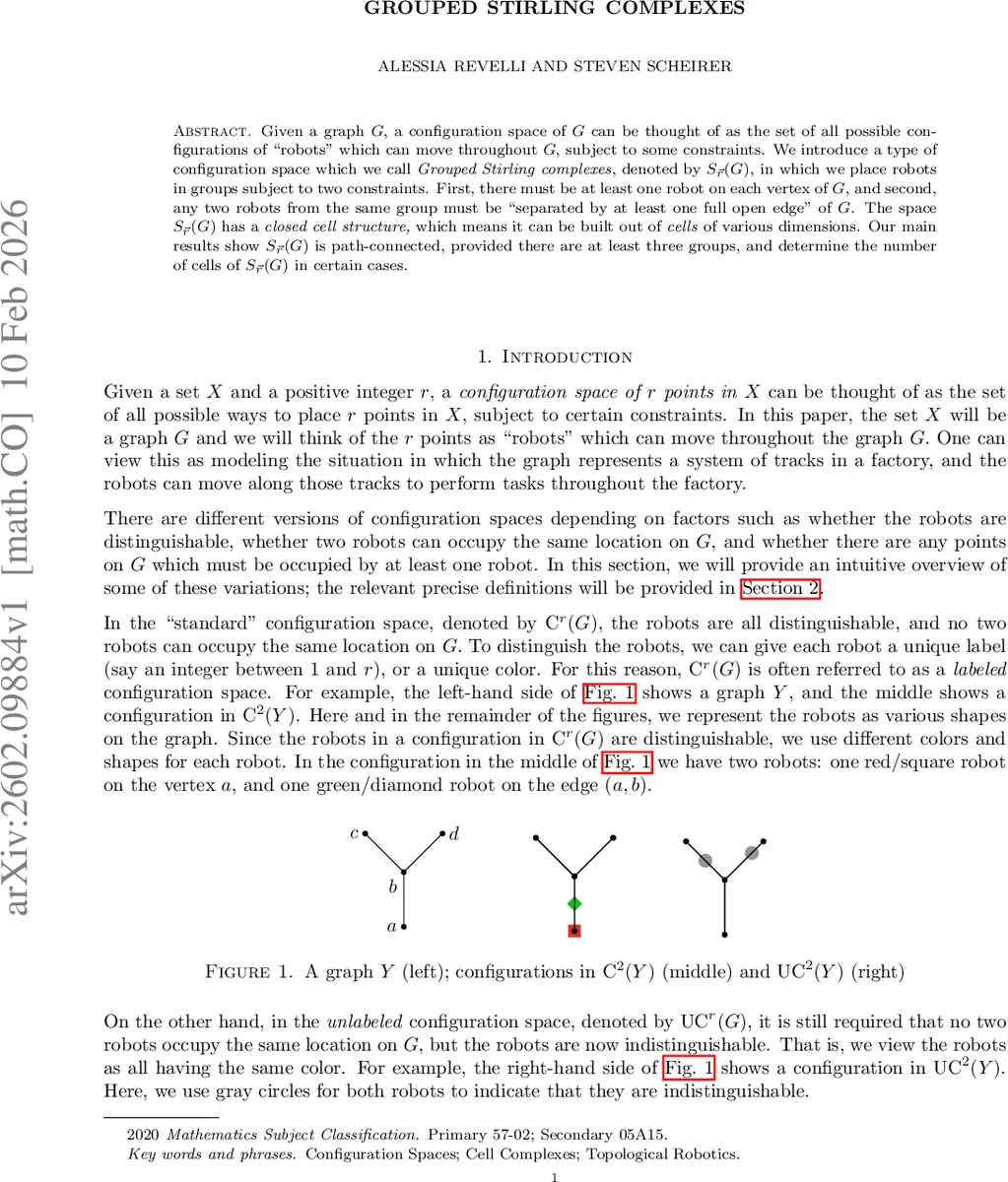
Given a graph $G$, a configuration space of $G$ can be thought of as the set of all possible configurations of “robots” which can move throughout $G$, subject to some constraints. We introduce a type of configuration space which we call Grouped Stirling complexes, denoted by $S_{\vec r}(G)$, in which we place robots in groups subject to two constraints. First, there must be at least one robot on each vertex of $G$, and second, any two robots from the same group must be “separated by at least one full open edge” of $G$. The space $S_{\vec r}(G)$ has a closed cell structure, which means it can be built out of cells of various dimensions. Our main results show $S_{\vec r}(G)$ is path-connected, provided there are at least three groups, and determine the number of cells of $S_{\vec r}(G)$ in certain cases.
💡 Research Summary
The paper introduces a new family of configuration spaces on a graph (G) called grouped Stirling complexes, denoted (S_{\vec r}(G)). A color vector (\vec r=(\ell_1,\dots,\ell_r)) specifies how many robots belong to each of (r) colors. A configuration is an (r)-tuple ((A_1,\dots,A_r)) where each (A_i) is a set of (\ell_i) points on the graph satisfying three conditions: (a) each color uses exactly (\ell_i) points, (b) every vertex of (G) is occupied by at least one robot of some color, and (c) within each color, any two robots must be separated by at least one full open edge – i.e., they cannot lie on the same vertex or on interiors of adjacent edges. This extends the previously studied Stirling complexes (S_r(G)) (where all robots are distinguishable by color but may share locations) by imposing the separation rule per color.
The authors first review standard configuration spaces (C_r(G)) (distinguishable robots, no sharing), (UC_r(G)) (indistinguishable, no sharing), and the discrete variants (D_r(G), UD_r(G)) that enforce the open‑edge separation rule. They then define a cubical cell structure for (S_{\vec r}(G)): a cell is an (r)-tuple ((c_1,\dots,c_r)) where each (c_i) is a set of (\ell_i) vertices or closed edges, covering all vertices, and with the property that within each color the chosen vertices/edges are pairwise disjoint. The dimension of a cell equals the total number of edges among all (c_i); a 0‑cell corresponds to all robots sitting on vertices, a 1‑cell to exactly one robot (of some color) moving along an edge interior, etc. This makes (S_{\vec r}(G)) a finite cubical complex.
The main topological result (Theorem 3.10) states that if the underlying graph (G) is connected and the color vector is “non‑trivial” (i.e., (\sum_i \ell_i > n) and each (\ell_i < n), where (n=|V(G)|)) and contains at least three colors, then (S_{\vec r}(G)) is path‑connected. The proof proceeds by showing that any two configurations can be linked by a sequence of elementary moves that slide a robot along an edge while respecting the separation rule, using the extra colors to “clear” space when necessary. The authors also note that with only one or two colors the space can be disconnected (e.g., on a star graph), which justifies the three‑color threshold.
In the combinatorial part, the paper computes the exact number of cells of each dimension for two families of color vectors. For (\vec r = (2,1,\dots,1)) (one color with two robots, the rest with a single robot) they obtain:
- 0‑cells: (\displaystyle \frac{n!,(n^2+n-2)}{4}),
- 1‑cells: (\displaystyle m,(n-1)!,\frac{n^2+n-4}{2}),
- no cells of dimension (\ge 2). Here (m=|E(G)|). This result (Theorem 4.1) follows from counting ways to choose a distinguished edge for the double‑robot color and distributing the remaining single‑robot colors over the remaining vertices.
For the uniform vector (\vec r = (n-1,\dots,n-1)) with (r\ge 2) colors (each color has (n-1) robots) they derive a more intricate formula (Theorem 4.4): \
Comments & Academic Discussion
Loading comments...
Leave a Comment