Mitigating Dynamic Tip-Over during Mobile Crane Slewing using Input Shaping
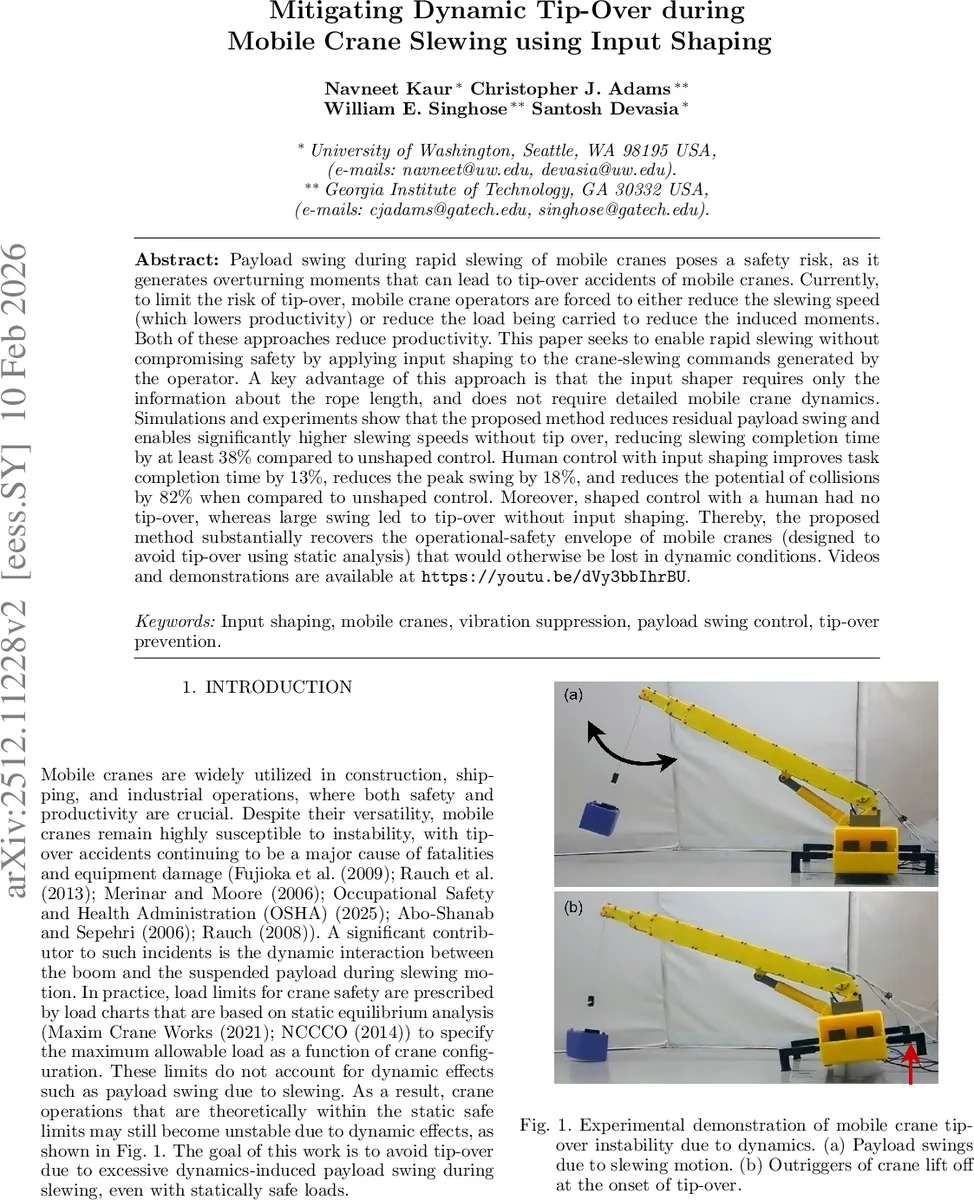
Payload swing during rapid slewing of mobile cranes poses a safety risk, as it generates overturning moments that can lead to tip-over accidents of mobile cranes. Currently, to limit the risk of tip-over, mobile crane operators are forced to either reduce the slewing speed (which lowers productivity) or reduce the load being carried to reduce the induced moments. Both of these approaches reduce productivity. This paper seeks to enable rapid slewing without compromising safety by applying input shaping to the crane-slewing commands generated by the operator. A key advantage of this approach is that the input shaper requires only the information about the rope length, and does not require detailed mobile crane dynamics. Simulations and experiments show that the proposed method reduces residual payload swing and enables significantly higher slewing speeds without tip over, reducing slewing completion time by at least 38% compared to unshaped control. Human control with input shaping improves task completion time by 13%, reduces the peak swing by 18%, and reduces the potential of collisions by 82% when compared to unshaped control. Moreover, shaped control with a human had no tip-over, whereas large swing led to tip-over without input shaping. Thereby, the proposed method substantially recovers the operational-safety envelope of mobile cranes (designed to avoid tip-over using static analysis) that would otherwise be lost in dynamic conditions. Videos and demonstrations are available at https://youtu.be/dVy3bbIhrBU.
💡 Research Summary
The paper addresses a critical safety issue in mobile crane operations: payload swing induced during rapid slewing can generate overturning moments that lead to tip‑over accidents, even when the load is within static safety limits. Conventional practice relies on static load charts that ignore dynamic effects, forcing operators to reduce slew speed or payload, thereby sacrificing productivity. To overcome this limitation, the authors propose augmenting human‑in‑the‑loop control with an input‑shaping filter applied to the operator’s slewing command.
The core of the approach is a Modified Unity‑Magnitude Zero‑Vibration (MUMZV) shaper, designed solely from the rope length (l). The natural swing frequency of the payload‑pendulum system is ωₙ = √(g/l). The shaper consists of three impulses at times t₁, t₂, t₃ with amplitudes A₁, A₂, A₃ that satisfy the zero‑residual condition ΣAᵢ e^{jωₙtᵢ}=0. A deflection‑ratio D_L (0<D_L≤0.5) determines the allowable peak swing; the authors use D_L=0.3, yielding A₃=0.6. The operator’s desired acceleration r(t) is convolved with the impulse sequence s(t)=∑Aᵢδ(t‑tᵢ) to produce a shaped acceleration u(t). This is scaled by η = τ_max / J_eq to respect torque limits, integrated, and saturated to generate a reference slew velocity ˙α_ref(t) that is sent to the motor controller. By shaping the acceleration rather than the velocity, the method directly suppresses excitation at ωₙ, ensuring zero residual swing at the end of the maneuver while preserving the commanded speed envelope.
Simulation studies were performed in PyBullet with a full 3‑D crane model matching the laboratory prototype (boom mass 2.93 kg, lower‑structure mass 7.24 kg, rope length 11.89 m for the full‑scale case). Various boom radii (R) and payload masses (m) were tested for a 90° rotation at increasing slew speeds. Results showed that the MUMZV‑shaped command allowed at least a 38 % increase in the maximum safe slew speed compared with the unshaped case, reducing task completion time accordingly. Peak swing angles decreased by roughly 18 % and the probability of collision with surrounding obstacles dropped by 82 %. Human‑in‑the‑loop experiments confirmed that operators using the shaped command never experienced tip‑over, whereas the same task without shaping produced a tip‑over in the high‑speed scenario.
Physical experiments with a scaled crane (boom length 0.9144 m, radius 0.7 m, payload 0.5 kg, rope length 0.5715 m) validated the simulation findings. Measured velocity and swing trajectories closely matched the simulated predictions, demonstrating that the shaper can be implemented in real time without requiring a detailed crane model.
The contributions of the work are threefold: (1) a model‑free input‑shaping design that only needs rope length, making it readily deployable on existing cranes; (2) a demonstrable improvement in both safety and productivity when the operator retains command authority; and (3) a quantitative recovery of the “dynamic safety envelope” that static analysis alone cannot provide. Limitations include sensitivity to changes in rope length and external disturbances such as wind, which would necessitate re‑tuning of the shaper parameters. Future research directions suggested are adaptive or online‑tuned shapers, extension to multi‑degree‑of‑freedom motions (e.g., boom pitch and yaw), and integration with higher‑level trajectory planners for fully autonomous crane operations while preserving the safety benefits demonstrated here.
Comments & Academic Discussion
Loading comments...
Leave a Comment