Optimally Controlling a Random Population
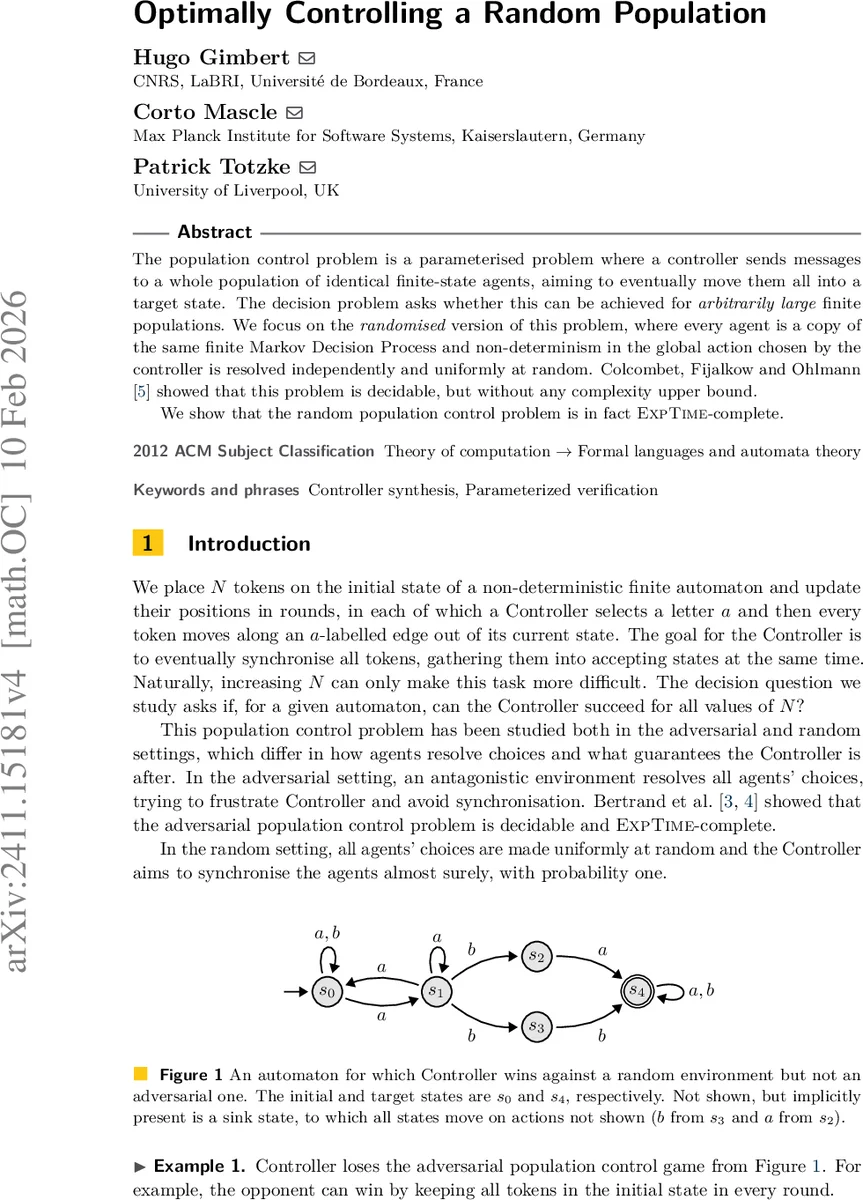
The population control problem is a parameterised problem where a controller sends messages to a whole population of identical finite-state agents, aiming to eventually move them all into a target state. The decision problem asks whether this can be achieved for arbitrarily large finite populations. We focus on the randomised version of this problem, where every agent is a copy of the same finite Markov Decision Process and non-determinism in the {global} action chosen by the controller is resolved independently and uniformly at random. Colcombet, Fijalkow and Ohlmann showed that this problem is decidable, but without any complexity upper bound. We show that the random population control problem is in fact EXPTIME-complete.
💡 Research Summary
The paper studies the random population control problem, a parameterised verification problem where a controller repeatedly selects a global action for a population of identical agents, each modeled by the same finite Markov Decision Process (MDP). After the controller’s choice, every agent independently resolves the nondeterminism of the chosen action uniformly at random. The objective is to guarantee that, for all finite population sizes, the controller can drive every token to a designated target set F with probability 1 (almost‑sure reachability).
Previously, Colcombet, Fijalkow and Ohlmann proved decidability of this problem but gave no complexity bound. This work closes the gap by showing that the problem is EXPTIME‑complete. The authors achieve this by combining two technical contributions: (1) a symbolic representation of the winning arena using ideals of vectors that count how many tokens occupy each state, and (2) a dynamic flow decision procedure that checks, within polynomial space, whether every configuration inside a candidate arena can reach the target while staying inside the arena.
Symbolic arenas.
A configuration of a population is abstracted by a vector v ∈ ℕ^S, where each component records the number of tokens in a particular MDP state. A commit is a pair (v, a) consisting of such a vector and an action a∈Σ. The set of all reachable configurations from a commit forms an ideal (v, a)↓. Because the underlying order (component‑wise ≤) is a well‑quasi‑order, any downward‑closed set of commits can be expressed as a finite union of incomparable ideals. The authors introduce the notion of K‑definability: an ideal is K‑definable if every component of its bound vector belongs to {0,…,K,ω}. They prove (Theorem 6) that if the controller can win for arbitrarily many tokens, then there exists a winning arena that is |S|‑definable. This dramatically limits the size of the symbolic representation needed for a witness.
Dynamic flow problem.
Given a finite set V of symbolic commits, an initial vector v₀∈V and a target set F, the dynamic flow problem asks whether every concrete configuration γ∈v₀↓ can reach some configuration in F↓ by a path that stays entirely inside V↓. This problem captures the need to move tokens through the arena without leaving it. The authors reduce it to a flow‑network feasibility question with capacity constraints and show (Theorem 7) that it can be solved in polynomial space, using only log K and |S| as parameters.
Algorithm.
Algorithm 1 starts from the maximal |S|‑definable arena (the union of all possible commits with components up to |S| or ω) and iteratively prunes it. Two checks are performed repeatedly: (i) arena closure: if a commit (v, a) leads to a configuration outside the current arena, the commit is removed; (ii) winningness: using the dynamic flow solver, if some configuration in the arena cannot reach the target while staying inside, the offending commit is removed. The process stabilises at a fixed point V; the resulting V↓ is a winning arena if and only if the initial vector i↓ (all tokens in the initial state) belongs to V.
Because the pruning never introduces new commits, the number of iterations is bounded by the size of the initial symbolic set, which is exponential in |S|. Each iteration performs only polynomial‑space checks, so the overall runtime is exponential in the size of the input MDP. Together with the known EXPTIME‑hardness reduction (Theorem 17), this yields EXPTIME‑completeness (Theorem 8).
Significance.
The paper provides the first tight complexity classification for random population control, matching the known bound for the adversarial version. The use of K‑definable symbolic arenas shows that, despite the underlying infinite state space (unbounded number of tokens), a finite and relatively small symbolic witness suffices. The dynamic flow technique offers a reusable tool for reasoning about token movement under capacity constraints, potentially applicable to other parameterised verification problems such as population protocols, chemical reaction networks, or distributed consensus under stochastic dynamics.
In summary, the authors combine well‑quasi‑order theory, symbolic ideal representations, and a novel flow‑based decision procedure to prove that deciding almost‑sure synchronisation of an arbitrarily large random population is EXPTIME‑complete, thereby settling an open question in the theory of parameterised stochastic systems.
Comments & Academic Discussion
Loading comments...
Leave a Comment