Daring few, patient many: division of labor in decentralized foraging collectives
How do social animals make effective decisions in the absence of a leader? While coordination can improve accuracy, it also introduces delays as information propagates through the group. In changing environments, these delays can outweigh the benefits of globally coordinated decisions, even when local interactions remain tightly organized. This raises a key question: how can groups implement efficient collective decision-making without central coordination? We address this question using a collective foraging model in which individuals share information and rewards, but each must choose whether to bear the cost of exploring or to remain idle. We show that decentralized collectives can match the performance of centrally controlled groups through a division of labor: a small, heterogeneous subset explores even when expected rewards are negative, acquiring information to enable future foraging, while a coordinated majority forages only when expected rewards are positive. Information redundancy causes the optimal number of explorers to grow sublinearly with group size, so that larger groups need proportionally fewer explorers. The heterogeneity of the group is maximized at intermediate ecological pressures, but optimal groups are homogeneous when costs or fluctuations are extreme. Crucially, these group-level policies do not require central coordination, emerging instead from agents following simple threshold-based decision rules. We thus demonstrate a mechanism through which leaderless collectives can make effective decisions under uncertainty and show how ecological pressures can drive changes in the distribution of strategies employed by the group.
💡 Research Summary
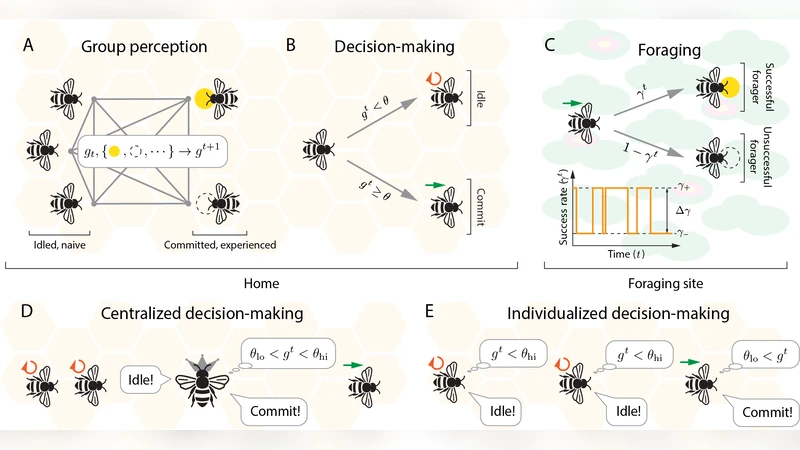
The paper tackles the fundamental problem of how leaderless social groups can make effective collective decisions, especially in environments that change faster than information can be propagated through the group. To address this, the authors construct a stylized foraging model in which each of N agents must decide at every time step whether to explore (incurring a cost c but gaining fresh information about the environment) or to remain idle and only exploit when the shared information predicts a positive expected reward μ. Rewards are pooled and redistributed equally among all agents, and any information obtained by an explorer is instantly broadcast to the whole group.
The analysis reveals a robust division of labor that emerges without any central coordination. A small, heterogeneous minority of “explorers” continues to sample the environment even when the immediate expected payoff is negative. Their role is to generate up-to‑date information that will later enable the majority of agents—the “foragers”—to harvest only when the expected payoff is positive, thereby avoiding unnecessary costs. Because information is redundant, the optimal number of explorers grows sub‑linearly with group size (E(N) ≈ k·N^α with 0 < α < 1). Consequently, larger groups need proportionally fewer explorers; the marginal benefit of adding another explorer quickly diminishes as the same environmental state is repeatedly sampled.
Ecological pressures—specifically the exploration cost c and the variance σ of the reward distribution—shape the heterogeneity of the population. When costs and fluctuations are moderate, the distribution of individual decision thresholds is widest, producing maximal heterogeneity: some agents are highly risk‑averse, others are bold. In contrast, extreme costs or extreme variability drive the population toward homogeneity, as all agents converge on the same threshold rule (either always explore, never explore, or always wait). The authors show that these population‑level policies can be implemented by a simple threshold rule at the individual level: each agent compares the current expected reward μ to a personal threshold θ and explores if μ − θ > 0. No global signal or leader is required; only local sharing of information is needed.
The paper’s findings have several implications. Biologically, they provide a theoretical foundation for the observed pattern of a few “daring scouts” and many “cautious foragers” in insect colonies, bird flocks, and fish schools. From an engineering perspective, the results suggest design principles for swarm robotics, distributed sensor networks, and decentralized AI systems: by endowing each unit with a simple, locally computed threshold, the collective can automatically allocate a sub‑linear number of explorers and achieve near‑optimal performance under uncertainty. The authors also discuss limitations, such as the assumption of instantaneous, perfect information sharing, and propose extensions that incorporate communication delays, dynamic role switching, and applications to human decentralized systems (e.g., crowdsourced decision making or blockchain governance).
In summary, the study demonstrates that leaderless collectives can match the performance of centrally controlled groups through an emergent division of labor. A small, heterogeneous set of explorers supplies fresh information even at short‑term loss, while the majority exploits only when it is profitable. The optimal explorer proportion shrinks with group size, and the degree of heterogeneity is tuned by ecological pressures. Crucially, these sophisticated group‑level strategies arise from agents following simple, threshold‑based decision rules, offering a parsimonious mechanism for effective collective decision‑making under uncertainty.
Comments & Academic Discussion
Loading comments...
Leave a Comment