A Precise Real-Time Force-Aware Grasping System for Robust Aerial Manipulation
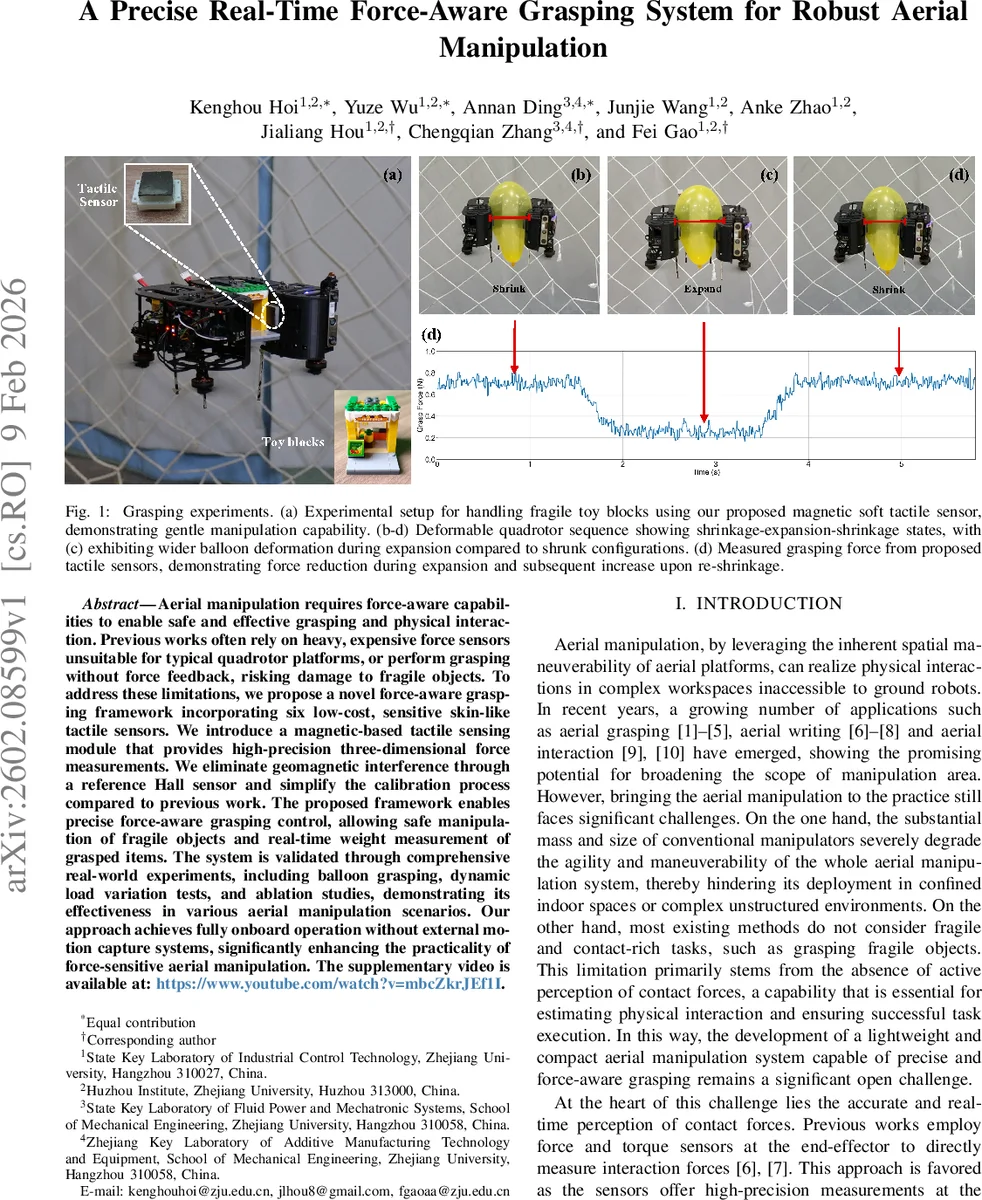
Aerial manipulation requires force-aware capabilities to enable safe and effective grasping and physical interaction. Previous works often rely on heavy, expensive force sensors unsuitable for typical quadrotor platforms, or perform grasping without force feedback, risking damage to fragile objects. To address these limitations, we propose a novel force-aware grasping framework incorporating six low-cost, sensitive skin-like tactile sensors. We introduce a magnetic-based tactile sensing module that provides high-precision three-dimensional force measurements. We eliminate geomagnetic interference through a reference Hall sensor and simplify the calibration process compared to previous work. The proposed framework enables precise force-aware grasping control, allowing safe manipulation of fragile objects and real-time weight measurement of grasped items. The system is validated through comprehensive real-world experiments, including balloon grasping, dynamic load variation tests, and ablation studies, demonstrating its effectiveness in various aerial manipulation scenarios. Our approach achieves fully onboard operation without external motion capture systems, significantly enhancing the practicality of force-sensitive aerial manipulation. The supplementary video is available at: https://www.youtube.com/watch?v=mbcZkrJEf1I.
💡 Research Summary
The paper presents a comprehensive force‑aware aerial manipulation system that integrates six low‑cost magnetic soft tactile sensors into a lightweight quadrotor platform, enabling precise real‑time three‑dimensional force measurement and safe handling of fragile objects. Traditional aerial manipulators rely on heavy, expensive force/torque (F/T) sensors or vision‑based tactile methods, both of which are unsuitable for small quadrotors due to weight, cost, and computational constraints. The authors address these limitations by designing a coin‑sized magnetic tactile sensor (25 × 32 × 16 mm, 8 g) that consists of a silicone matrix embedded with neodymium‑iron‑boron particles forming a flexible magnetic film, and a Hall‑effect sensor (MLX90393SL) that detects magnetic field variations caused by deformation under external loads.
A key challenge for magnetic sensing on a moving aerial platform is interference from the Earth’s geomagnetic field, which varies with the vehicle’s attitude. To compensate, the system incorporates a reference Hall sensor rigidly mounted on the quadrotor body. The raw magnetic flux density vector measured by each tactile sensor (B_i) is corrected by subtracting the rotated reference field (R_i·B_ref), yielding a compensated vector (B̂_i). A nonlinear mapping function S(·) together with calibrated coefficients (a_i, b_i) converts B̂_i into a three‑dimensional force estimate (f̂_i). This compensation pipeline involves only matrix multiplications and elementary nonlinear operations, allowing execution at 400 Hz on an STM32F042 microcontroller, well above the 200 Hz control loop frequency.
The control architecture combines three modules: (1) a position controller based on admittance control that treats the measured contact force as an external disturbance and adjusts a virtual mass‑damper system; (2) a conventional attitude controller for stable flight; and (3) a grasping force controller that sets a desired contact force (F_d) and uses the error between F_d and f̂_i to command the single servo actuator that changes the quadrotor’s frame size (shrink‑expand‑shrink). This integrated scheme enables the robot to gently grasp deformable or fragile items (e.g., balloons, toy blocks) while maintaining precise trajectory tracking.
Experimental validation includes:
- Balloon grasping: The robot repeatedly shrinks, expands, and re‑shrinks while measuring contact forces below 0.05 N, demonstrating that the balloon is not punctured.
- Dynamic load variation: Objects ranging from 10 g to 200 g are lifted and transported; position error remains under 2 cm, and the system accurately estimates the changing weight in real time.
- Ablation studies: Removing the geomagnetic compensation dramatically increases force measurement variance with attitude changes, confirming the necessity of the reference sensor. Calibration time is reduced by a factor of five compared with data‑driven approaches, and measurement error stays below 0.05 N.
Communication between sensors and the flight computer uses a hybrid CAN/UART protocol; daisy‑chaining over CAN reduces wiring complexity for the six‑sensor array. The total sensor cost is roughly $10 per unit, yielding a complete tactile suite for under $60, a stark contrast to commercial F/T sensors that cost several thousand dollars and add hundreds of grams.
In summary, the authors deliver a fully onboard, low‑cost, high‑precision force‑aware grasping solution for aerial robots. By integrating lightweight magnetic tactile sensors, an effective geomagnetic compensation algorithm, and an admittance‑based force control loop, the system achieves safe manipulation of delicate objects, real‑time weight estimation, and robust performance under dynamic disturbances—all without external motion‑capture infrastructure. This work opens pathways for applications such as disaster‑site rescue, high‑rise inspection, and precision agriculture where handling fragile items with aerial platforms is essential.
Comments & Academic Discussion
Loading comments...
Leave a Comment