Finger Tendon Vibration: Finger Movement Illusions for Immersive Virtual Object Interaction
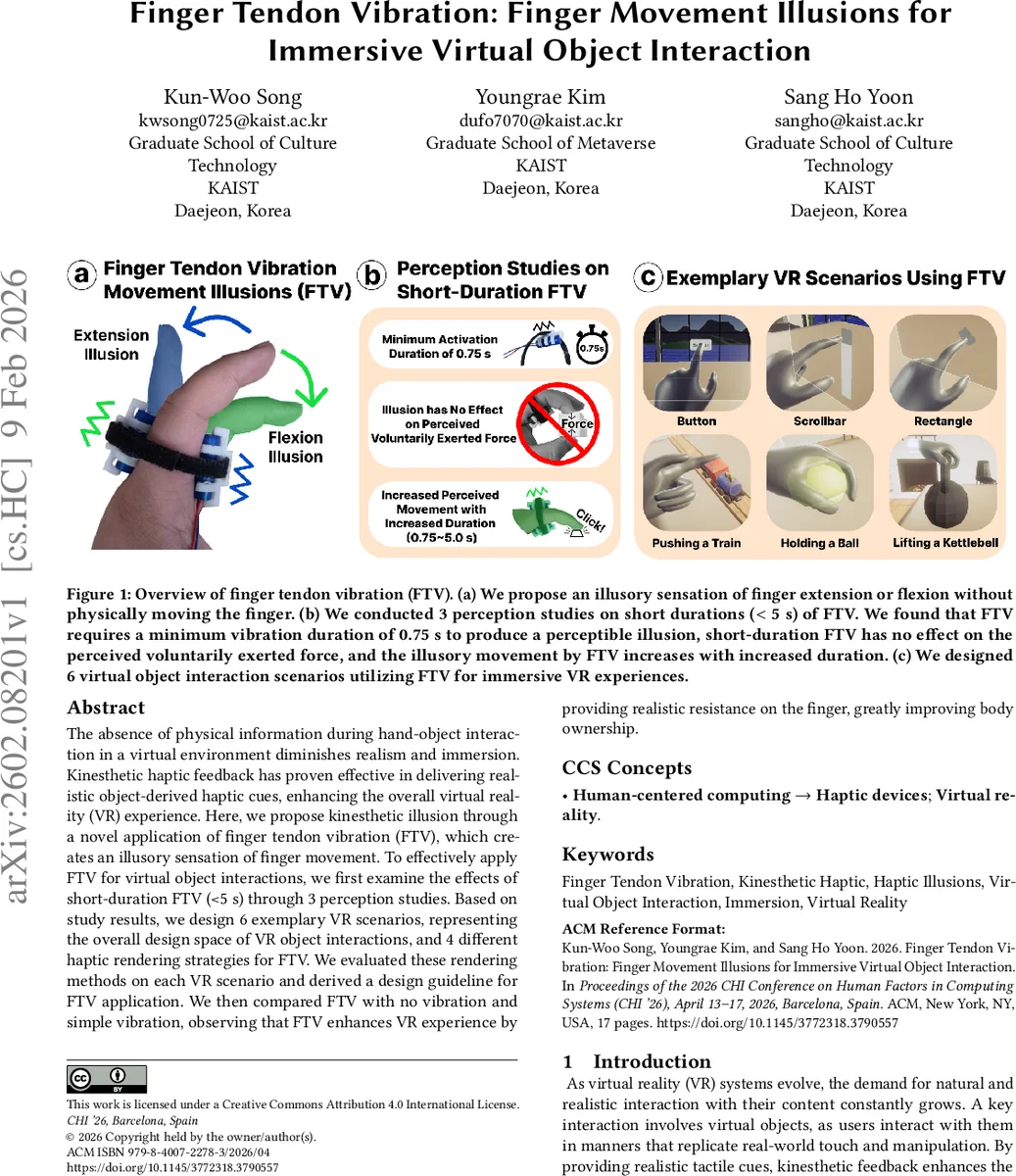
The absence of physical information during hand-object interaction in a virtual environment diminishes realism and immersion. Kinesthetic haptic feedback has proven effective in delivering realistic object-derived haptic cues, enhancing the overall virtual reality (VR) experience. Here, we propose kinesthetic illusion through a novel application of finger tendon vibration (FTV), which creates an illusory sensation of finger movement. To effectively apply FTV for virtual object interactions, we first examine the effects of short-duration FTV (<5 s) through 3 perception studies. Based on study results, we design 6 exemplary VR scenarios, representing the overall design space of VR object interactions, and 4 different haptic rendering strategies for FTV. We evaluated these rendering methods on each VR scenario and derived a design guideline for FTV application. We then compared FTV with no vibration and simple vibration, observing that FTV enhances VR experience by providing realistic resistance on the finger, greatly improving body ownership.
💡 Research Summary
The paper addresses the lack of realistic haptic cues in virtual reality (VR) object manipulation by introducing Finger Tendon Vibration (FTV), a technique that creates an illusory sensation of finger flexion or extension without actual finger movement. Unlike traditional kinesthetic haptic devices, which are often bulky, cable‑laden, or require complex actuation (e.g., pneumatic pistons, EMS), FTV relies on two miniature eccentric rotating mass (ERM) motors attached to the proximal phalanx of the index finger. The motors operate at a fixed 80 Hz frequency with a ±1 mm displacement amplitude, delivering the necessary perpendicular force to stimulate muscle spindles in the tendon.
To determine whether short‑duration vibrations (under 5 seconds) can reliably generate the desired illusion, the authors conducted three perception studies with right‑handed participants using the left index finger. Study 1 varied vibration duration (0.5, 0.75, 1.5, 3, 5 s) and identified a minimum perceptible threshold of 0.75 s; durations shorter than this failed to produce a consistent illusion. Study 2 examined whether the vibration interferes with voluntarily exerted force (e.g., pressing a button) and found no statistically significant effect, indicating that short‑duration FTV does not alter the user’s sense of applied force. Study 3 investigated the relationship between vibration duration and the magnitude of perceived involuntary finger movement, revealing a roughly linear increase in perceived joint angle with longer vibrations; a 0.75 s pulse produced a movement comparable to the sensation of pressing a keyboard key.
Armed with these findings, the researchers designed six representative VR interaction scenarios that span common UI and 3D manipulation tasks: (1) button press, (2) scrollbar slide, (3) 2‑D rectangle drag, (4) train push, (5) ball hold, and (6) kettlebell lift. For each scenario they evaluated four haptic rendering strategies derived from two trigger modalities—Collision (vibration starts at actual contact) and Predict (vibration starts based on a predicted contact point)—combined with two duration policies—Full (vibration persists for the entire interaction) and Fixed (a brief, predetermined vibration).
User testing showed that for prolonged interactions (e.g., holding or lifting objects) the Full‑Collision method delivered the most natural resistance and directionality, while for brief UI actions the Fixed‑Predict method minimized latency and still produced a convincing illusion. A subsequent comparative study pitted FTV against simple vibration (no illusion) and no vibration at all. Across subjective metrics of realism, immersion, presence, and especially body ownership, FTV outperformed both baselines, with participants reporting a stronger sense that the virtual object was physically resisting their finger in a specific direction.
The authors synthesize these results into a practical design guideline for applying FTV in VR: (1) ensure vibration duration ≥ 0.75 s for perceptibility, (2) use Collision triggering for interactions where contact timing is reliable, (3) employ Predict triggering for UI elements requiring immediate feedback, (4) adopt Full duration when a continuous force cue is beneficial, and (5) use Fixed short pulses for brief, discrete actions.
In summary, the study demonstrates that short‑duration tendon vibration can serve as an effective, low‑cost kinesthetic haptic illusion for real‑time VR object interaction. By leveraging the body’s innate proprioceptive pathways, FTV provides directional resistance without the mechanical complexity of conventional force‑feedback devices, thereby enhancing realism and body ownership while preserving user comfort and system simplicity. Future work is suggested on multi‑finger implementations, adaptive amplitude modulation, and tighter visual‑haptic integration to further boost immersion.
Comments & Academic Discussion
Loading comments...
Leave a Comment