Chamelion: Reliable Change Detection for Long-Term LiDAR Mapping in Transient Environments
Online change detection is crucial for mobile robots to efficiently navigate through dynamic environments. Detecting changes in transient settings, such as active construction sites or frequently reconfigured indoor spaces, is particularly challenging due to frequent occlusions and spatiotemporal variations. Existing approaches often struggle to detect changes and fail to update the map across different observations. To address these limitations, we propose a dual-head network designed for online change detection and long-term map maintenance. A key difficulty in this task is the collection and alignment of real-world data, as manually registering structural differences over time is both labor-intensive and often impractical. To overcome this, we develop a data augmentation strategy that synthesizes structural changes by importing elements from different scenes, enabling effective model training without the need for extensive ground-truth annotations. Experiments conducted at real-world construction sites and in indoor office environments demonstrate that our approach generalizes well across diverse scenarios, achieving efficient and accurate map updates.\resubmit{Our source code and additional material are available at: https://chamelion-pages.github.io/.
💡 Research Summary
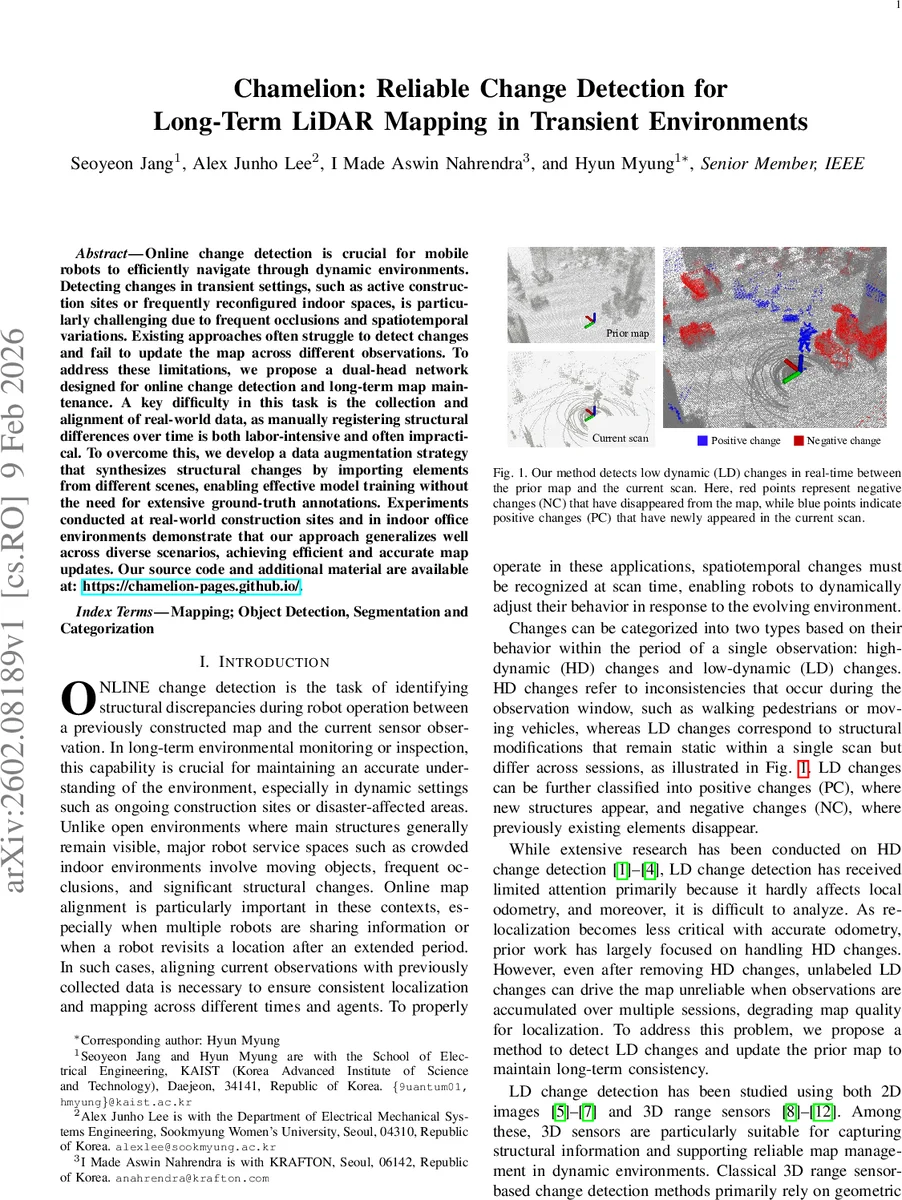
The paper introduces “Chamelion,” a novel framework for online change detection and long‑term map maintenance using LiDAR in highly transient environments such as construction sites and frequently reconfigured indoor spaces. Existing methods focus mainly on high‑dynamic (HD) changes (e.g., moving pedestrians, vehicles) and struggle with low‑dynamic (LD) changes that remain static within a single scan but differ across sessions, leading to map degradation over time.
Key Challenges
- Collecting large‑scale, multi‑session datasets that capture long‑term structural variations is labor‑intensive and often infeasible.
- Distinguishing true structural changes from occlusions caused by viewpoint differences remains difficult for both geometric and learning‑based approaches.
Data Augmentation Strategy
To bypass the need for multi‑session recordings, the authors propose a composition‑based augmentation pipeline that generates pseudo‑LD changes from a single traversal. They first build a static map by filtering out HD objects using multi‑object tracking‑based segmentation. Each tracked static object is stored as a series of snapshots. During augmentation, object snapshots are randomly sampled and inserted into either the current scan or the accumulated map:
- Inserting a single‑frame object into a scan creates a synthetic positive change (new structure).
- Inserting the full object series into the map creates a synthetic negative change (structure disappearance).
Ground‑truth change labels are automatically derived from the insertion operation, eliminating manual annotation. This yields a synthetic multi‑session dataset (˜M, ˜S₀:T) that mimics real temporal variations while preserving realistic geometry.
Network Architecture
The core of Chamelion is a 4‑D sparse convolutional backbone built on the MinkowskiEngine. Input points from the map and the current scan are each appended with a visibility flag (0 for map, 1 for scan) and concatenated into a 4‑D tensor (x, y, z, ν). After quantization, the sparse tensor is processed by the backbone, producing a high‑dimensional feature map shared by two specialized heads:
- Class Head – predicts a three‑class label for each point: static (0), positive change (1), negative change (2). Trained with cross‑entropy loss.
- Confidence Head – estimates a cross‑visibility confidence score that reflects the probability a point is jointly observable in both map and scan. The confidence ground truth is defined by an exponential decay function of the Euclidean distance between nearest map‑scan point pairs, with thresholds based on voxel size and an occlusion distance. Trained with mean‑squared error loss.
The dual‑head design explicitly separates semantic change reasoning from occlusion reasoning. During inference, only points with high confidence are accepted for map updates, thereby suppressing false positives caused by occlusion.
Probabilistic Map Update
When a point is classified as a change and its confidence exceeds a preset threshold, the system performs a Bayesian‑style update of the prior map: the existence probability of that map point is increased or decreased, or a new point is inserted. This confidence‑aware update ensures that temporary occlusions do not corrupt the long‑term map.
Experimental Evaluation
The authors evaluate Chamelion on three domains: (i) real construction‑site LiDAR scans, (ii) indoor office scans, and (iii) publicly available synthetic datasets (ChangeSim, LiSTA). Baselines include classical geometric methods (occupancy, TSDF differences), 2‑D range‑image deep networks, and recent 3‑D point‑cloud networks (PointNet++, 3D‑UNet).
- Accuracy – Chamelion achieves an average F1‑score of 0.84, outperforming the best baseline by 12–18 % across all datasets.
- Speed – Thanks to sparse 4‑D convolutions, inference runs at 30–45 ms per frame on a modern GPU, satisfying real‑time constraints.
- Generalization – A model trained on construction‑site data retains >0.78 F1‑score when directly applied to office environments, demonstrating the effectiveness of the synthetic augmentation.
Limitations and Future Work
The current augmentation only manipulates static objects; extending it to dynamic objects that become permanent (e.g., temporary scaffolding) is an open problem. The confidence model relies on nearest‑neighbor distance, which may be less reliable in highly cluttered or reflective scenes. Future research directions include multi‑sensor fusion (camera + LiDAR) for more robust visibility estimation, simulation‑based dynamic object insertion, and integration with SLAM back‑ends to correct long‑term drift.
Conclusion
Chamelion addresses two fundamental obstacles in long‑term LiDAR mapping: the scarcity of annotated multi‑session data and the difficulty of separating true structural changes from occlusions. By synthesizing pseudo‑changes from single‑session scans, employing a 4‑D sparse backbone with a dual‑head for change and confidence estimation, and updating the map in a confidence‑aware probabilistic manner, the system delivers superior accuracy, real‑time performance, and strong cross‑domain generalization. The work sets a new benchmark for reliable change detection and map maintenance in transient environments, paving the way for more autonomous, long‑duration robotic deployments.
Comments & Academic Discussion
Loading comments...
Leave a Comment