Energy-Controllable Time Integration for Elastodynamic Contact
Dynamic simulation of elastic bodies is a longstanding task in engineering and computer graphics. In graphics, numerical integrators like implicit Euler and BDF2 are preferred due to their stability at large time steps, but they tend to dissipate energy uncontrollably. In contrast, symplectic methods like implicit midpoint can conserve energy but are not unconditionally stable and fail on moderately stiff problems. To address these limitations, we propose a general class of numerical integrators for Hamiltonian problems which are symplectic on linear problems, yet have superior stability on nonlinear problems. With this, we derive a novel energy-controllable time integrator, A-search, a simple modification of implicit Euler that can follow user-specified energy targets, enabling flexible control over energy dissipation or conservation while maintaining stability and physical fidelity. Our method integrates seamlessly with barrier-type energies and allows for inversion-free and penetration-free guarantees, making it well-suited for handling large deformations and complex collisions. Extensive evaluations over a wide range of material parameters and scenes demonstrate that A-search has biases to keep energy in low frequency motion rather than dissipation, and A-search outperforms traditional methods such as BDF2 at similar total running times by maintaining energy and leading to more visually desirable simulations.
💡 Research Summary
The paper addresses a long‑standing challenge in physics‑based animation: how to integrate the dynamics of highly deformable elastic bodies with contact while using large time steps that are required for interactive or offline graphics applications. Implicit Euler and the two‑step backward differentiation formula (BDF2) are popular because they are unconditionally stable, but they dissipate energy in an uncontrolled manner, often causing motion to die out too quickly. Symplectic integrators such as implicit midpoint or Newmark‑β conserve energy much better, yet they are only conditionally stable for nonlinear or stiff problems and can produce high‑frequency artifacts that are visually undesirable.
To bridge this gap, the authors introduce a new family of time integrators called “decoupled symplectic methods.” The key idea is to keep the position update identical to the classic implicit Euler step (which guarantees robust handling of constraints and barrier potentials) and to modify only the velocity update through a scalar parameter α. When α = 0 the method reduces to implicit Euler; when α = 1 it becomes a linearly symplectic scheme they denote A‑1. The authors prove that A‑1 is linearly symplectic and unconditionally stable for linear systems, and they demonstrate experimentally that it is significantly more stable than other symplectic schemes (implicit midpoint, trapezoidal) in the presence of strong nonlinearity.
Building on A‑1, they derive “A‑search,” an adaptive integrator that interpolates between A‑1 and implicit Euler on the velocity level. The interpolation weight is chosen dynamically based on the difference between the current total energy and a user‑specified target energy. If the system has lost too much energy, the weight shifts toward A‑1, reducing dissipation; if the system has excess energy, the weight moves toward implicit Euler, increasing damping. This adaptive quadrature approach allows the user to prescribe any energy profile—from perfect conservation to the strong damping of implicit Euler—without changing the time step size. Because only velocities are blended, the positional solution (and thus all positional constraints such as non‑penetration and non‑inversion) remains exactly as in the implicit Euler solve, preserving inversion‑free and penetration‑free guarantees.
The method integrates seamlessly with barrier‑type potentials and contact models, including static and dynamic friction. The authors show that A‑search can be implemented as a minor modification of existing implicit Euler solvers: after solving the implicit position step, one evaluates the forces at a quadrature point determined by the current energy error and computes a blended velocity update.
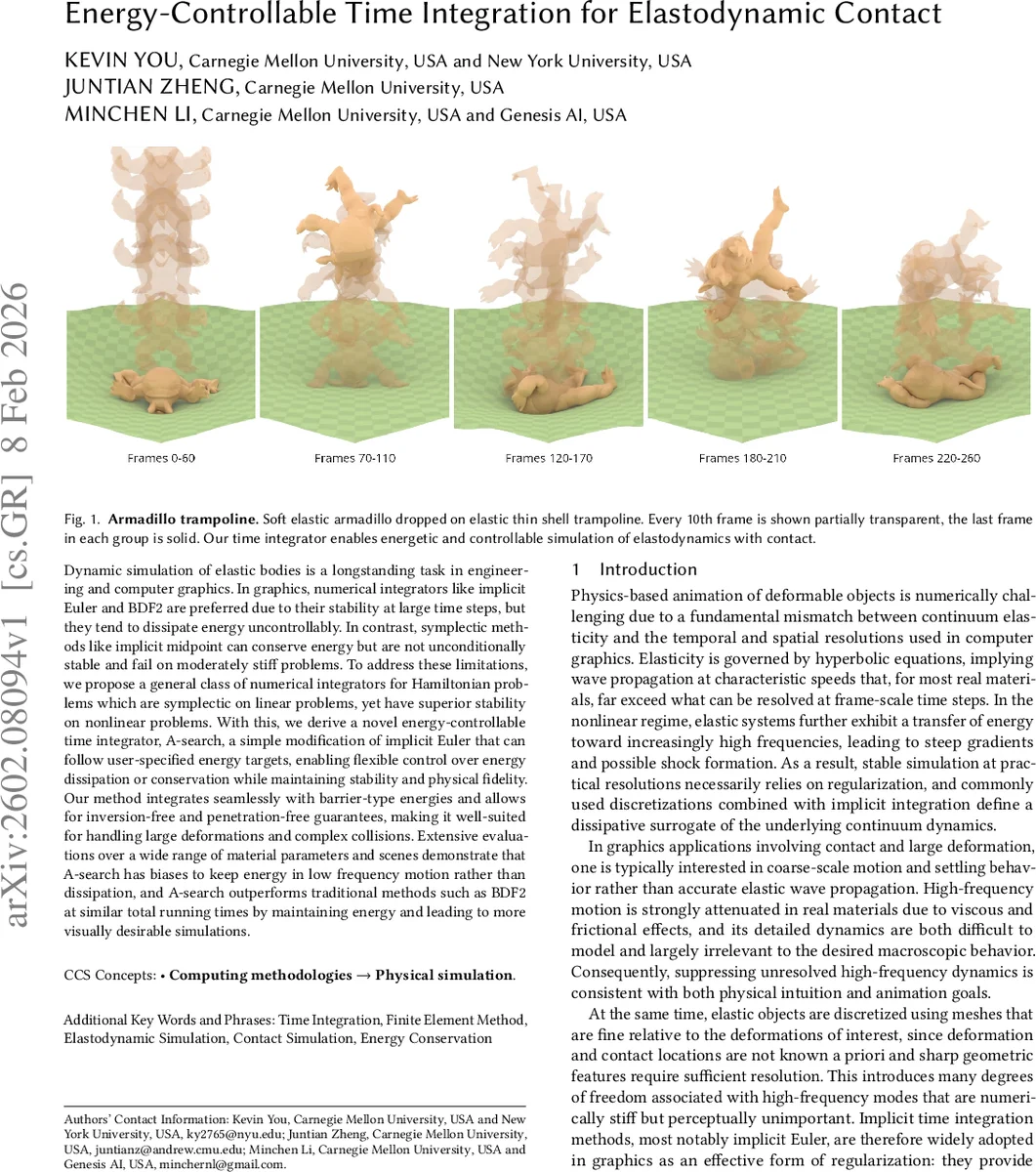
Extensive experiments cover a wide range of material stiffnesses (soft rubber to near‑rigid) and challenging collision scenarios (an elastic armadillo dropping onto a thin elastic trampoline, a soft bunny colliding with frictional cubes, etc.). Quantitative results demonstrate that, for the same fixed time step, A‑search retains significantly more kinetic energy than BDF2—often reducing energy loss by 30‑50 %—and channels the remaining energy into low‑frequency deformation modes, producing smoother and more visually appealing motions. High‑frequency oscillations that normally cause numerical stiffness are effectively damped, while low‑frequency dynamics remain lively. Runtime comparisons show that A‑search achieves comparable or better visual quality at similar total computational cost because it eliminates the need for manual time‑step tuning to achieve a desired dissipation level.
In summary, the contributions of the paper are: (1) a novel “decoupled symplectic” framework that is symplectic for linear problems yet more stable for nonlinear elasticity; (2) the A‑1 integrator, a simple linearly symplectic scheme with unconditional linear stability; (3) the A‑search algorithm, which adaptively interpolates velocities to give user‑controlled energy dissipation without altering the time step; (4) seamless integration with barrier potentials and contact constraints, preserving inversion‑free and penetration‑free guarantees; and (5) thorough experimental validation showing superior energy behavior and visual quality compared to standard implicit Euler and BDF2. This work offers a practical tool for artists and engineers who need stable large‑step simulations while retaining control over the energetic character of the animation.
Comments & Academic Discussion
Loading comments...
Leave a Comment