Gust Estimation and Rejection with a Disturbance Observer for Proprioceptive Underwater Soft Morphing Wings
Unmanned underwater vehicles are increasingly employed for maintenance and surveying tasks at sea, but their operation in shallow waters is often hindered by hydrodynamic disturbances such as waves, currents, and turbulence. These unsteady flows can induce rapid changes in direction and speed, compromising vehicle stability and manoeuvrability. Marine organisms contend with such conditions by combining proprioceptive feedback with flexible fins and tails to reject disturbances. Inspired by this strategy, we propose soft morphing wings endowed with proprioceptive sensing to mitigate environmental perturbations. The wing’s continuous deformation provides a natural means to infer dynamic disturbances: sudden changes in camber directly reflect variations in the oncoming flow. By interpreting this proprioceptive signal, a disturbance observer can reconstruct flow parameters in real time. To enable this, we develop and experimentally validate a dynamic model of a hydraulically actuated soft wing with controllable camber. We then show that curvature-based sensing allows accurate estimation of disturbances in the angle of attack. Finally, we demonstrate that a controller leveraging these proprioceptive estimates can reject disturbances in the lift response of the soft wing. By combining proprioceptive sensing with a disturbance observer, this technique mirrors biological strategies and provides a pathway for soft underwater vehicles to maintain stability in hazardous environments.
💡 Research Summary
This paper addresses the challenge of sudden hydrodynamic disturbances—such as waves, currents, and turbulence—that jeopardize the stability and maneuverability of unmanned underwater vehicles (UUVs) operating in shallow water. Inspired by marine organisms that combine proprioceptive feedback with flexible fins and tails, the authors propose a soft morphing wing equipped with proprioceptive sensing to both detect and reject gust-like disturbances in real time.
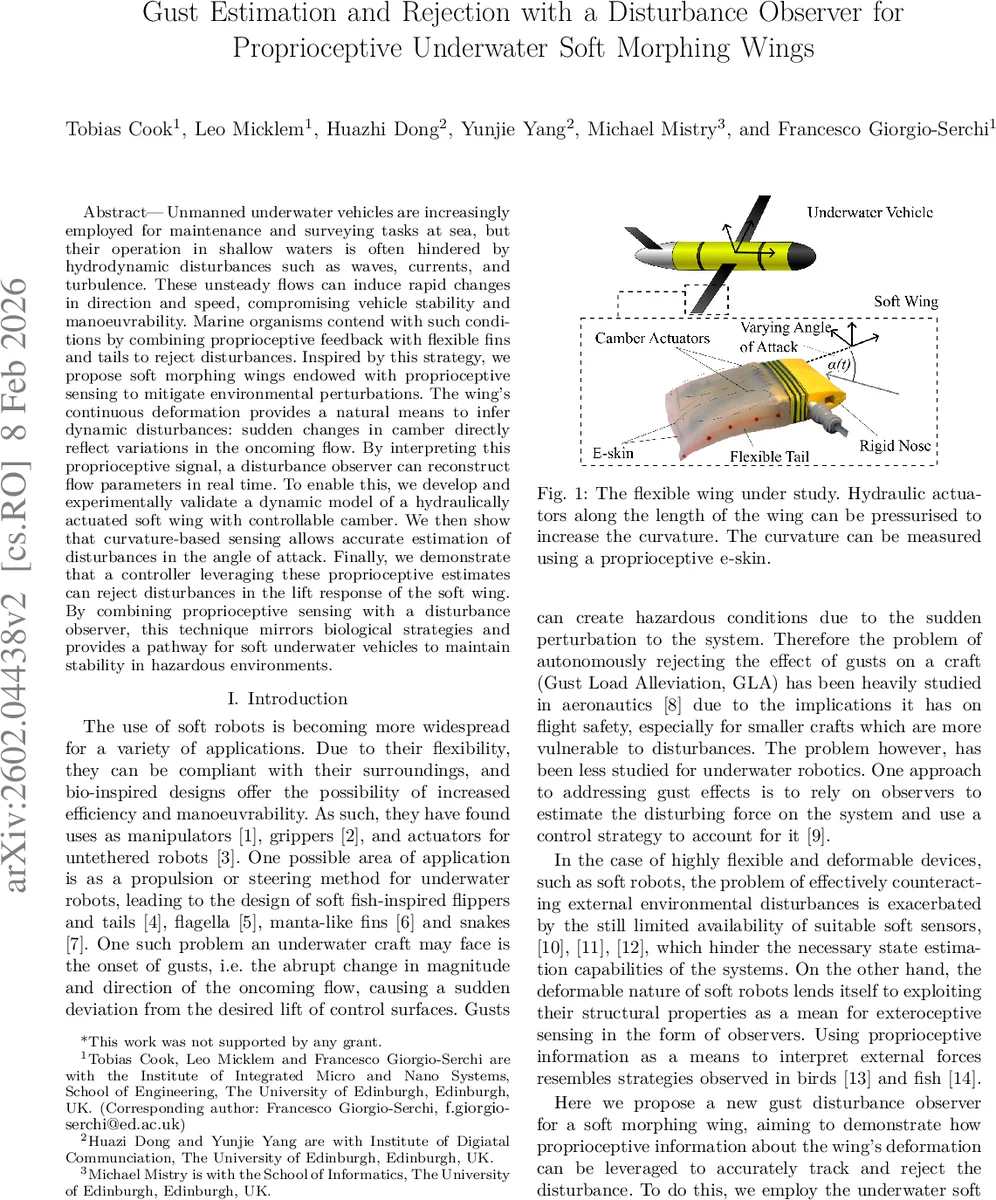
The hardware consists of a rigid plastic nose attached to a silicone (Ecoflex 00‑30) flexible tail. Two internal water‑filled hydraulic tubes run through the silicone; by varying the internal pressure P, the tubes stiffen and bend, thereby controlling the wing’s camber (curvature) θ. A capacitive e‑skin embedded along the tail measures the instantaneous curvature, providing a direct proprioceptive signal without any external flow sensor.
To exploit this signal, the authors develop a dynamic model of the wing using the Piecewise Constant Curvature (PCC) framework. The wing’s centre‑line is described by Cartesian coordinates x(s,θ) and y(s,θ) as functions of the normalized span coordinate s∈
Comments & Academic Discussion
Loading comments...
Leave a Comment