SPOT: Spatio-Temporal Obstacle-free Trajectory Planning for UAVs in an Unknown Dynamic Environment
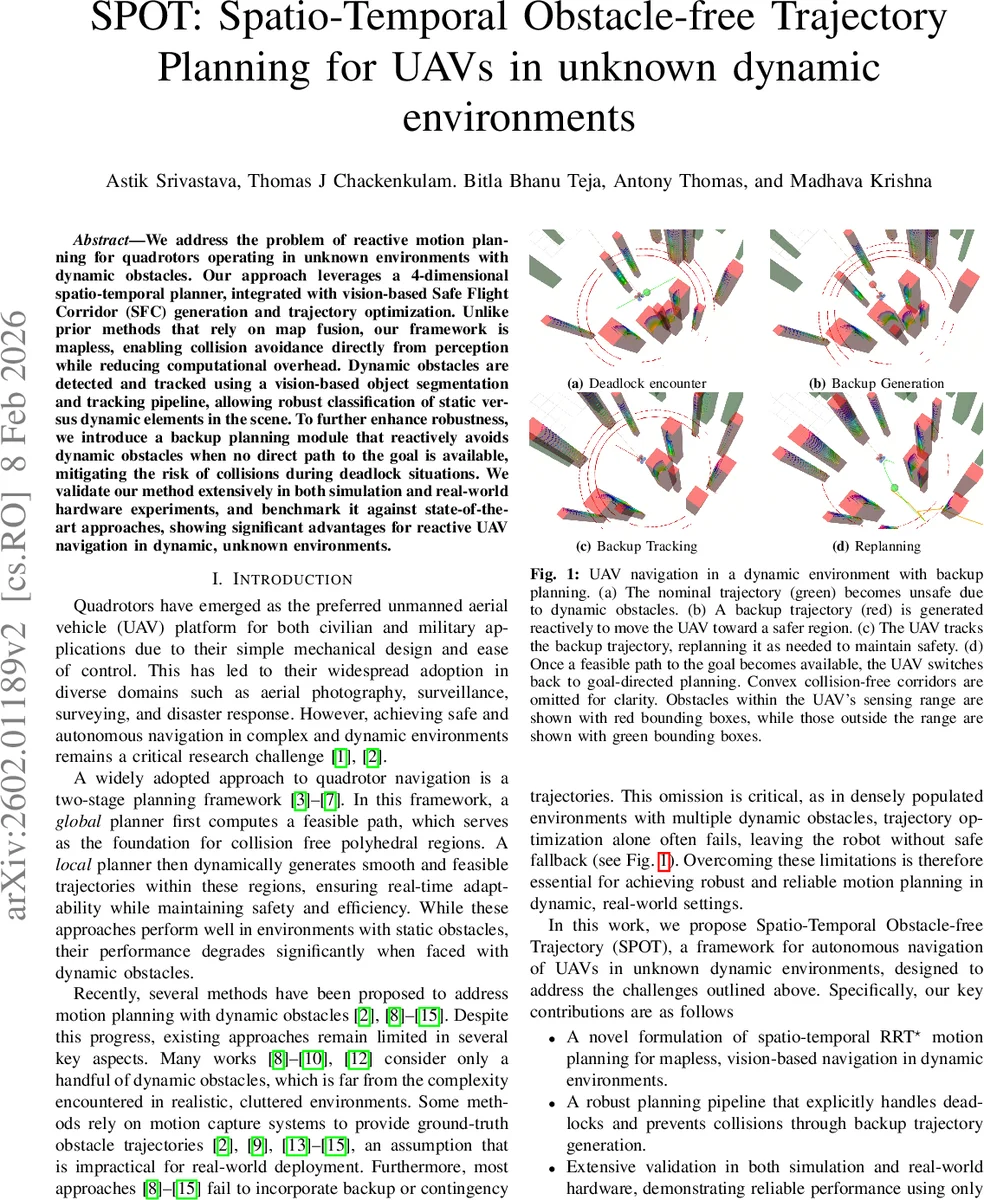
We address the problem of reactive motion planning for quadrotors operating in unknown environments with dynamic obstacles. Our approach leverages a 4-dimensional spatio-temporal planner, integrated with vision-based Safe Flight Corridor (SFC) generation and trajectory optimization. Unlike prior methods that rely on map fusion, our framework is mapless, enabling collision avoidance directly from perception while reducing computational overhead. Dynamic obstacles are detected and tracked using a vision-based object segmentation and tracking pipeline, allowing robust classification of static versus dynamic elements in the scene. To further enhance robustness, we introduce a backup planning module that reactively avoids dynamic obstacles when no direct path to the goal is available, mitigating the risk of collisions during deadlock situations. We validate our method extensively in both simulation and real-world hardware experiments, and benchmark it against state-of-the-art approaches, showing significant advantages for reactive UAV navigation in dynamic, unknown environments.
💡 Research Summary
The paper introduces SPOT (Spatio‑Temporal Obstacle‑free Trajectory), a map‑less reactive motion‑planning framework for quadrotors operating in unknown environments populated with dynamic obstacles. Instead of building a global occupancy map, SPOT relies solely on an onboard depth camera and a vision‑based object segmentation‑tracking pipeline to obtain a point cloud where each point is labeled as static or dynamic and, for dynamic points, an estimated velocity vector is attached. This spatio‑temporal representation is the foundation for all subsequent planning stages.
The core planning algorithm is a 4‑dimensional RRT* (ST‑RRT*). Each node stores a spatial position (x, y, z) and an accumulated travel time t from the start. Two feasibility constraints are enforced during tree expansion: (i) causality (child.t > parent.t) and (ii) velocity feasibility (‖Δp‖ ≤ v_max·Δt). Consequently, every edge respects the UAV’s kinematic limits and the time‑dependent nature of obstacle occupancy. The edge cost is defined as C = ‖Δp‖ + w·Δt, where the weight w trades spatial distance against temporal progress, allowing the planner to prioritize fast escape or distance minimization as required.
To accelerate convergence, SPOT extends the informed‑sampling strategy of Informed RRT*. After a first solution is found, sampling is confined to the prolate hyperspheroid that contains all potentially better paths (defined by the current best cost c_best). Spatial samples are drawn inside this ellipsoid, and a time coordinate is assigned by t_rand = t_start + k·c_best·w with k uniformly distributed in
Comments & Academic Discussion
Loading comments...
Leave a Comment