Low-Rank Koopman Deformables with Log-Linear Time Integration
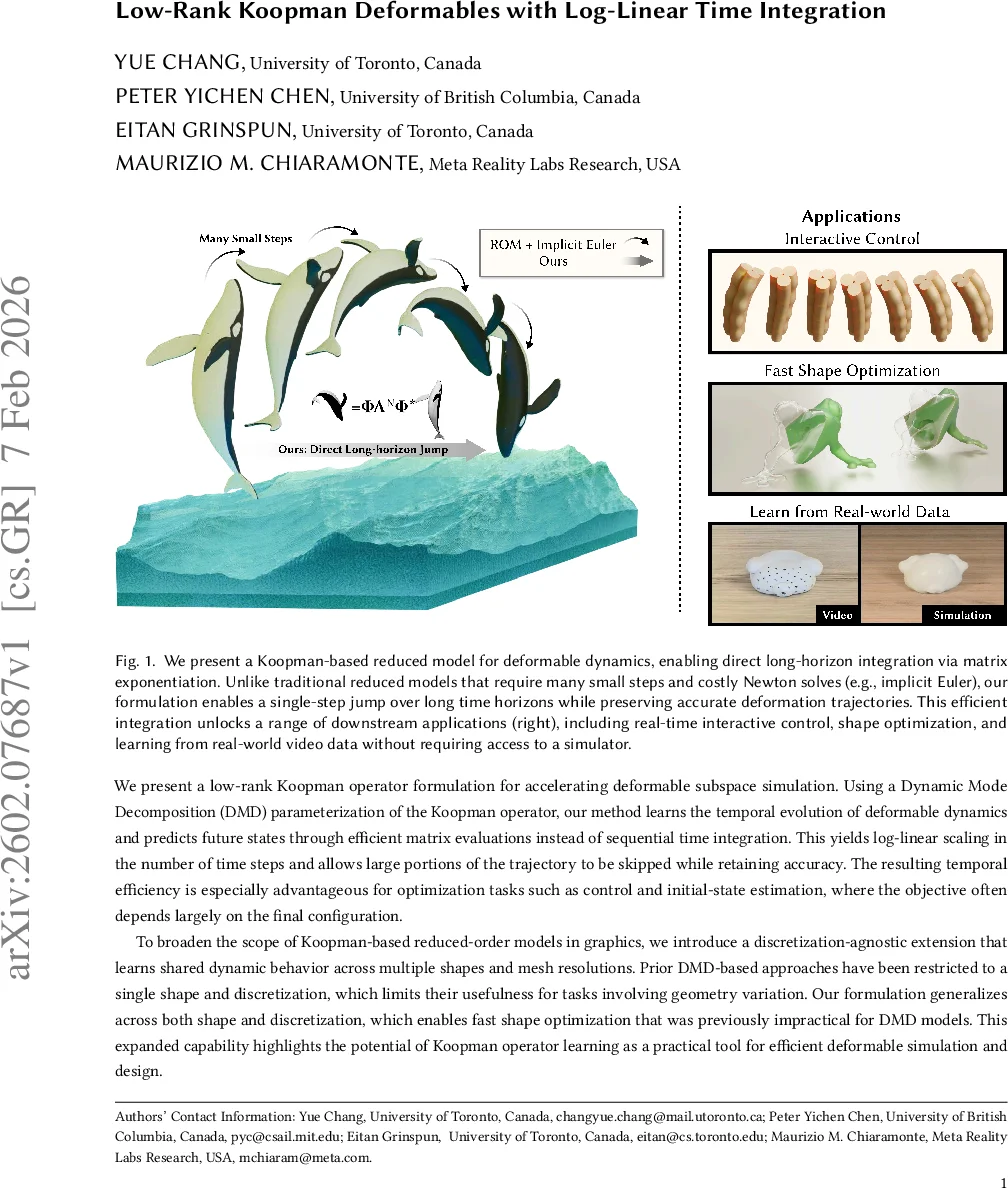
We present a low-rank Koopman operator formulation for accelerating deformable subspace simulation. Using a Dynamic Mode Decomposition (DMD) parameterization of the Koopman operator, our method learns the temporal evolution of deformable dynamics and predicts future states through efficient matrix evaluations instead of sequential time integration. This yields log-linear scaling in the number of time steps and allows large portions of the trajectory to be skipped while retaining accuracy. The resulting temporal efficiency is especially advantageous for optimization tasks such as control and initial-state estimation, where the objective often depends largely on the final configuration. To broaden the scope of Koopman-based reduced-order models in graphics, we introduce a discretization-agnostic extension that learns shared dynamic behavior across multiple shapes and mesh resolutions. Prior DMD-based approaches have been restricted to a single shape and discretization, which limits their usefulness for tasks involving geometry variation. Our formulation generalizes across both shape and discretization, which enables fast shape optimization that was previously impractical for DMD models. This expanded capability highlights the potential of Koopman operator learning as a practical tool for efficient deformable simulation and design.
💡 Research Summary
The paper introduces a novel reduced‑order framework for deformable simulation that simultaneously reduces spatial and temporal complexity. Traditional reduced‑order models (ROMs) compress the high‑dimensional displacement and velocity fields into a low‑dimensional subspace but still rely on step‑by‑step numerical integration, leading to a computational cost that scales linearly with the number of time steps. To overcome this bottleneck, the authors adopt a Koopman operator perspective and approximate it using Dynamic Mode Decomposition (DMD).
Key technical contributions are:
- Joint State Representation – The state vector combines both positions (q) and momenta (\dot q), forming (x =
Comments & Academic Discussion
Loading comments...
Leave a Comment