Affine Transformable Unmanned Ground Vehicle
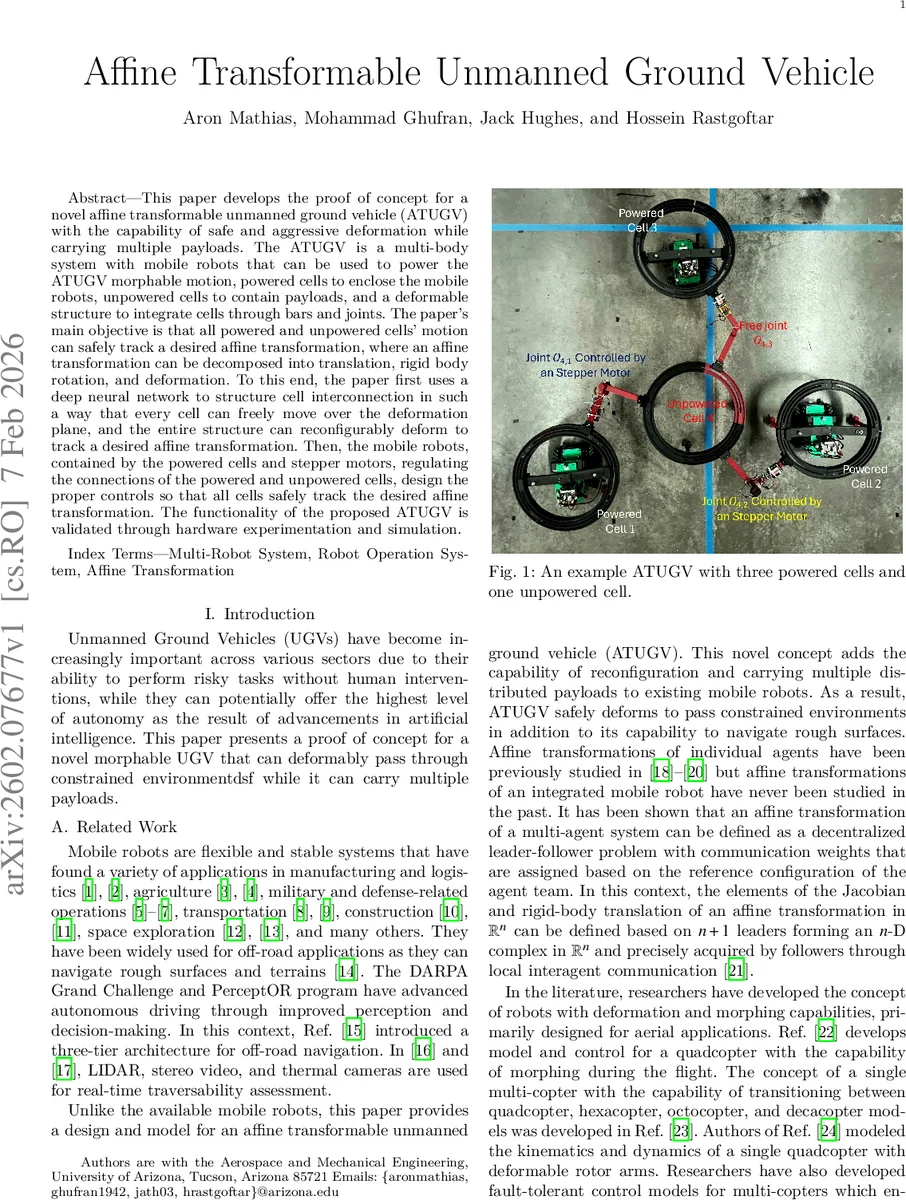
This paper develops the proof of concept for a novel affine transformable unmanned ground vehicle (ATUGV) with the capability of safe and aggressive deformation while carrying multiple payloads. The ATUGV is a multi-body system with mobile robots that can be used to power the ATUGV morphable motion, powered cells to enclose the mobile robots, unpowered cells to contain payloads, and a deformable structure to integrate cells through bars and joints. The objective is that all powered and unpowered cells motion can safely track a desired affine transformation, where an affine transformation can be decomposed into translation, rigid body rotation, and deformation. To this end, the paper first uses a deep neural network to structure cell interconnection in such a way that every cell can freely move over the deformation plane, and the entire structure can reconfigurably deform to track a desired affine transformation. Then, the mobile robots, contained by the powered cells and stepper motors, regulating the connections of the powered and unpowered cells, design the proper controls so that all cells safely track the desired affine transformation. The functionality of the proposed ATUGV is validated through hardware experimentation and simulation.
💡 Research Summary
The paper introduces a novel concept called the Affine Transformable Unmanned Ground Vehicle (ATUGV), which extends conventional unmanned ground vehicles (UGVs) by adding the ability to undergo aggressive, safe deformation while transporting multiple payloads. The ATUGV is built from a collection of identical circular “cells” that are either powered (containing a mobile robot that provides actuation) or unpowered (serving as passive payload carriers). All cells share the same radius r and are interconnected through a graph G(V,E). The inter‑cell connections are designed automatically using a three‑layer deep neural network: each layer corresponds to a group of cells, and the network’s weights define which cells belong to each group, thereby guaranteeing that every cell can move freely on the deformation plane without kinematic locking.
The desired motion of the whole structure is expressed as an affine transformation of the reference positions a_i:
p_i(t) = Q(t) a_i + d(t) for every cell i.
Here, Q(t) ∈ ℝ²ˣ² is decomposed into a rigid‑body rotation matrix R(σ_r) and a strain matrix U(σ_d, λ₁, λ₂). σ_r(t) denotes the rotation angle, σ_d(t) the shear angle, and λ₁(t), λ₂(t) the principal stretches (0 < λ ≤ 1). By analyzing the geometry of the reference configuration, the authors derive a lower bound on the principal stretches:
λ_min = 2 r / d_min,
where d_min is the smallest distance between any two cell centers in the reference layout. This bound guarantees that cells never intersect during deformation.
Control is split between powered and unpowered cells. Powered cells receive a velocity command proportional to the position error:
v_i = α_i (p_i – r_i),
where r_i(t) is the measured actual position (obtained via a high‑resolution motion‑capture system) and α_i is a gain tuned experimentally. Unpowered cells are steered by two stepper motors that adjust the elbow angles θ_ij of the bar‑joint mechanisms linking a cell to its three neighbors. Desired elbow angles are computed from the target positions using an inverse‑kinematic relation:
θ_dij(t) = 2 arcsin(‖p_i – p_j‖ / (2 L_ij + 2 r)).
The hardware prototype consists of four cells (three powered, one unpowered) built with 3‑D‑printed bars and joints, ROS‑controlled mobile robots, and servo‑driven joints. Experiments were conducted in a 5 m × 5 m × 2 m indoor lab equipped with a Vicon motion‑capture system. The ATUGV was commanded to follow a time‑varying affine transformation whose final parameters were λ_f1 = 0.9, λ_f2 = 0.8, translation of 1 m in both axes, σ_f_r = 0.2 rad, and σ_f_d = 0.15 rad, over a 20‑second horizon. A parallel simulation used the same parameters but completed the transformation in 10 seconds. In both cases, the measured cell trajectories stayed within the prescribed safety margins, the principal stretches never fell below λ_min, and the rotation/shear angles tracked the reference values with small error, confirming the effectiveness of the proposed planning and control framework.
The paper’s contributions are fourfold: (1) a deep‑neural‑network‑based method for automatically structuring inter‑cell connections that enable unrestricted planar deformation, (2) a theoretical lower bound on principal stretches ensuring collision‑free deformation, (3) distinct yet coordinated control laws for powered and unpowered cells, and (4) comprehensive validation through both hardware experiments and high‑fidelity simulations. Limitations include scalability concerns as the number of cells grows (increasing network training and control complexity), confinement to two‑dimensional deformation, and the absence of obstacle avoidance or three‑dimensional morphing capabilities. Future work is suggested to extend the framework to 3‑D deformable structures, adaptive communication topologies, and distributed obstacle‑avoidance strategies, thereby broadening the applicability of ATUGV to more complex, real‑world environments.
Comments & Academic Discussion
Loading comments...
Leave a Comment