An Integer Linear Programming Approach to Geometrically Consistent Partial-Partial Shape Matching
The task of establishing correspondences between two 3D shapes is a long-standing challenge in computer vision. While numerous studies address full-full and partial-full 3D shape matching, only a limited number of works have explored the partial-partial setting, very likely due to its unique challenges: we must compute accurate correspondences while at the same time find the unknown overlapping region. Nevertheless, partial-partial 3D shape matching reflects the most realistic setting, as in many real-world cases, such as 3D scanning, shapes are only partially observable. In this work, we introduce the first integer linear programming approach specifically designed to address the distinctive challenges of partial-partial shape matching. Our method leverages geometric consistency as a strong prior, enabling both robust estimation of the overlapping region and computation of neighbourhood-preserving correspondences. We empirically demonstrate that our approach achieves high-quality matching results both in terms of matching error and smoothness. Moreover, we show that our method is more scalable than previous formalisms.
💡 Research Summary
The paper tackles the realistic scenario of partial‑partial 3D shape matching, where both source and target meshes are incomplete and the overlapping region is unknown. Existing works either focus on full‑full or partial‑full matching, or use non‑linear integer programming for the partial‑partial case, which limits scalability. The authors propose the first integer linear programming (ILP) formulation that explicitly incorporates geometric consistency for partial‑partial matching.
Key components of the method are:
-
Surface‑cycle representation – Each triangle of the source mesh X is represented as a directed 3‑node cycle C_i. This follows the GeCo framework and enables a uniform treatment of all mesh elements.
-
Product graphs – For every surface cycle C_i a product graph P_i is built with the whole target mesh Y. Vertices of P_i are pairs (v∈C_i, y∈Y) and edges encode all admissible correspondences between edges of C_i and edges (or self‑loops) of Y.
-
ILP encoding of shortest cyclic paths – A binary variable x_k indicates whether a product edge e_k belongs to the matching. Continuity constraints (∑ incoming x = ∑ outgoing x for each product vertex) guarantee that selected edges form a closed cyclic path in each P_i, i.e., a valid triangle‑to‑mesh mapping.
-
Geometric‑consistency coupling – Adjacent triangles share an edge; the ILP contains coupling constraints that force the two corresponding product edges to agree (or be inactive). This enforces the definition of partial‑partial geometric consistency: interior edges in X must map to interior edges (or identical vertices) in Y.
-
Overlap modelling – The unknown overlapping region is handled by injectivity and surjectivity constraints, allowing vertices of either shape to remain unmatched. Overlap probabilities o_X and o_Y, obtained from a pre‑processor or a learning module, are incorporated as linear costs, biasing the optimizer toward high‑probability regions.
-
Coarse‑to‑fine strategy – To scale to meshes with tens of thousands of triangles, the authors solve the ILP first on a down‑sampled version of the shapes, then use the resulting correspondences as warm‑starts for finer resolutions. This dramatically reduces the number of variables and constraints at each level.
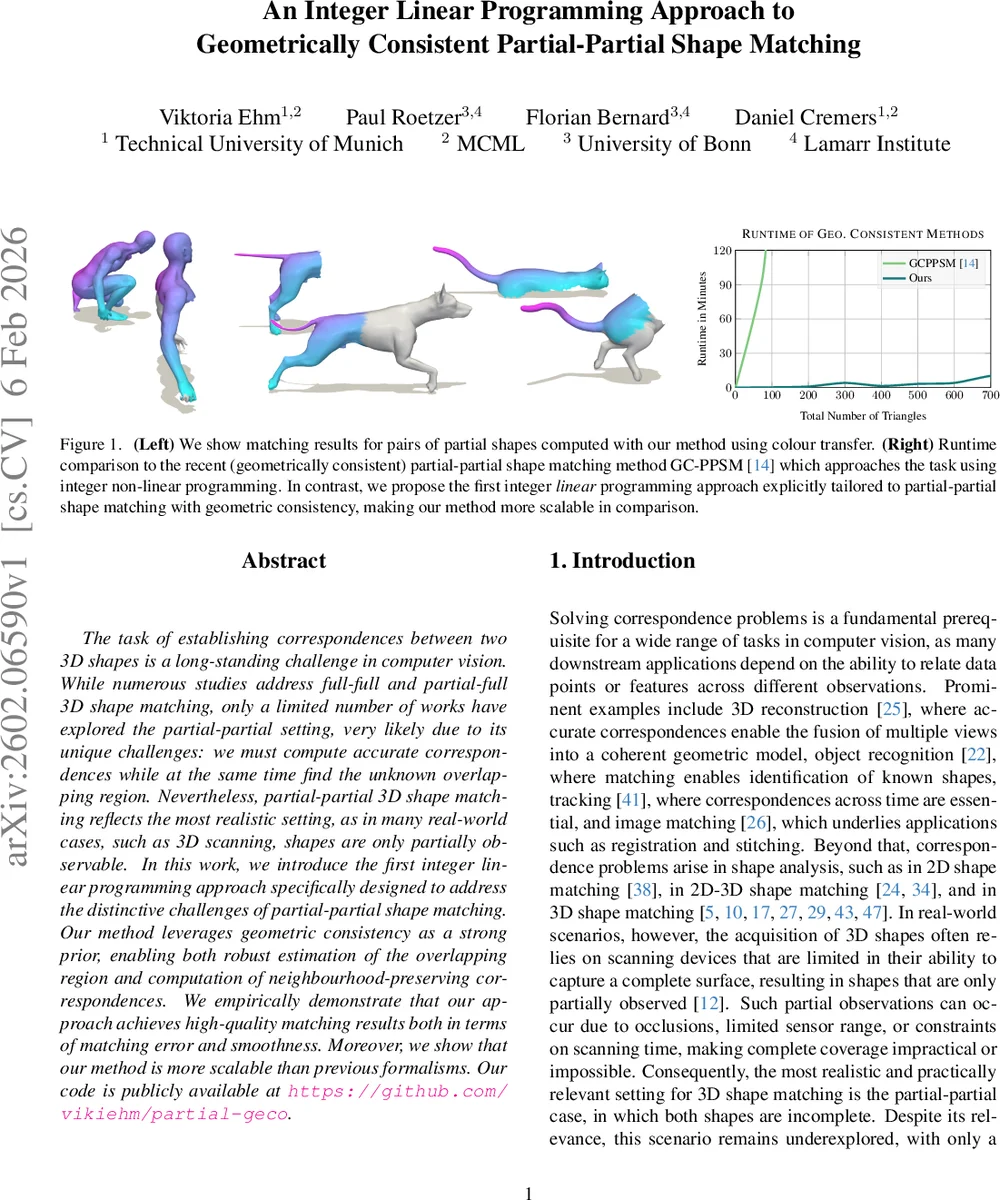
Experimental evaluation compares the proposed ILP method (referred to as GCP‑PPSM) with the state‑of‑the‑art non‑linear integer programming approach GC‑PPSM
Comments & Academic Discussion
Loading comments...
Leave a Comment