REACT: Real-time Entanglement-Aware Coverage Path Planning for Tethered Underwater Vehicles
Inspection of underwater structures with tethered underwater vehicles is often hindered by the risk of tether entanglement. We propose REACT (real-time entanglement-aware coverage path planning for tethered underwater vehicles), a framework designed to overcome this limitation. REACT comprises a computationally efficient geometry-based tether model using the signed distance field (SDF) map for accurate, real-time simulation of taut tether configurations around arbitrary structures in 3D. This model enables an efficient online replanning strategy by enforcing a maximum tether length constraint, thereby actively preventing entanglement. By integrating REACT into a coverage path planning framework, we achieve safe and entanglement-free inspection paths, previously challenging due to tether constraints. The complete REACT framework’s efficacy is validated in a pipe inspection scenario, demonstrating safe navigation and full coverage inspection. Simulation results show that REACT achieves complete coverage while maintaining tether constraints and completing the total mission 20% faster than conventional planners, despite a longer inspection time due to proactive avoidance of entanglement that eliminates extensive post-mission disentanglement. Real-world experiments confirm these benefits, where REACT completes the full mission, while the baseline planner fails due to physical tether entanglement.
💡 Research Summary
The paper introduces REACT, a real‑time entanglement‑aware coverage path planning framework for tethered underwater vehicles (ROVs). The authors address the critical problem of tether entanglement, which can halt missions, by combining a fast geometry‑based tether model with an online replanning strategy that respects a maximum tether length constraint.
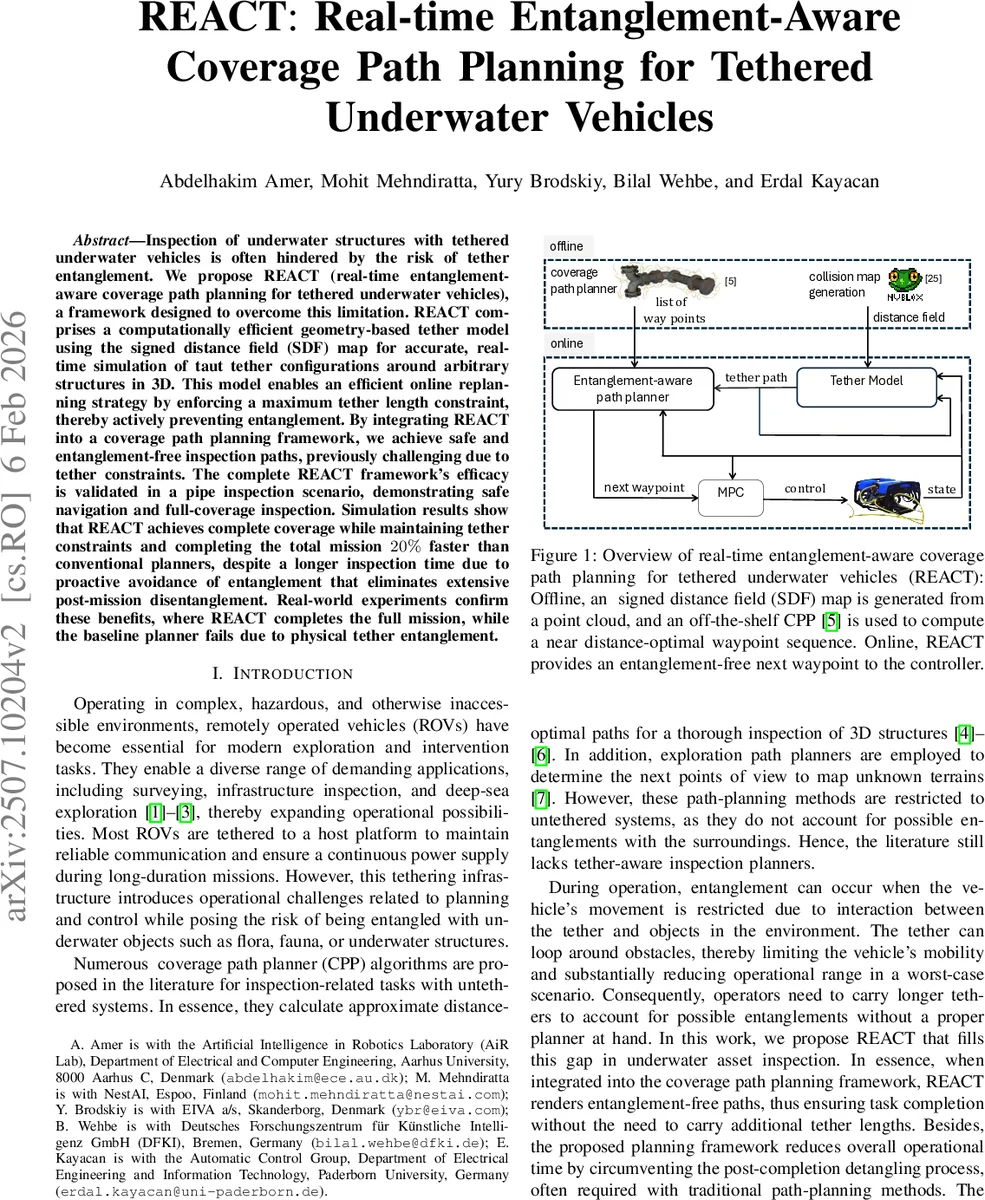
The system is split into an offline phase and an online execution phase. In the offline phase, a point‑cloud of the inspection environment is converted into a signed distance field (SDF) map using the nvblox library. An off‑the‑shelf coverage path planner (FC‑Planner) then generates a nominal waypoint sequence that guarantees full coverage of the target structure, ignoring tether constraints. This decoupling allows the planner to focus on coverage optimality without the computational burden of tether considerations.
The online phase introduces two tightly coupled modules. First, a tether model discretizes the tether into nodes spaced by a resolution δ. Using the SDF, the algorithm checks line‑of‑sight between node pairs; if a straight segment is collision‑free, a “shortcut” operation replaces intermediate nodes, effectively tightening the tether around obstacles. When a collision is detected, the algorithm steps back to the previous node and repeats the check. After shortcutting, a “pull” operation incrementally moves each node toward the ROV end, ensuring the tether remains taut and does not become trapped in concave geometry. This iterative process converges quickly and runs in near‑real‑time because it relies only on simple distance queries in the SDF.
Second, the entanglement‑aware replanner monitors the current tether length L_tether at each control cycle. If L_tether ≤ L_max (the prescribed maximum length), the system operates in “normal mode” and simply commands the ROV toward the next nominal waypoint. When the length exceeds L_max, the planner switches to “recovery mode”. In recovery mode a backward search along the existing tether path generates an alternative safe trajectory toward the same waypoint that respects the length limit. The search selects the nearest node where a collision‑free line‑of‑sight to the waypoint exists, constructs a short recovery path, and updates the ROV’s target accordingly. Once the recovery path is completed, the system returns to normal mode. This dual‑mode approach guarantees that the tether never over‑extends or loops around obstacles while still making progress on the inspection task.
Experimental validation is performed on a pipe‑inspection scenario. In simulation, REACT achieves 100 % coverage, never violates the tether length constraint, and completes the overall mission about 20 % faster than a baseline planner that does not consider tether entanglement. Although individual waypoint travel times are slightly longer due to proactive detours, the elimination of post‑mission disentanglement yields a net time gain. Real‑world underwater trials confirm the simulation findings: REACT successfully navigates around the pipe without the tether snagging, whereas the baseline planner experiences a physical entanglement that halts the vehicle.
The authors claim four main contributions: (1) a computationally efficient SDF‑based tether model capable of real‑time simulation of taut tether configurations; (2) an online replanning algorithm that enforces a maximum tether length to prevent entanglement; (3) a modular integration of offline coverage planning with online tether management, enabling easy adoption with existing planners; and (4) thorough simulation and experimental evidence of safe, full‑coverage inspection without tether failures.
Limitations are acknowledged. The model assumes a perfectly taut tether, ignoring elasticity, drag, and fluid‑induced sag, which may lead to discrepancies in highly dynamic water currents. Additionally, low‑resolution SDFs can produce gaps that allow unrealistic shortcutting through obstacles. Future work is suggested to incorporate physical tether dynamics, adaptive SDF resolution, and extensions to moving obstacles or multi‑ROV scenarios. Overall, REACT represents a significant step toward practical, safe, and efficient tethered underwater inspection missions.
Comments & Academic Discussion
Loading comments...
Leave a Comment