Bioinspired Kirigami Capsule Robot for Minimally Invasive Gastrointestinal Biopsy
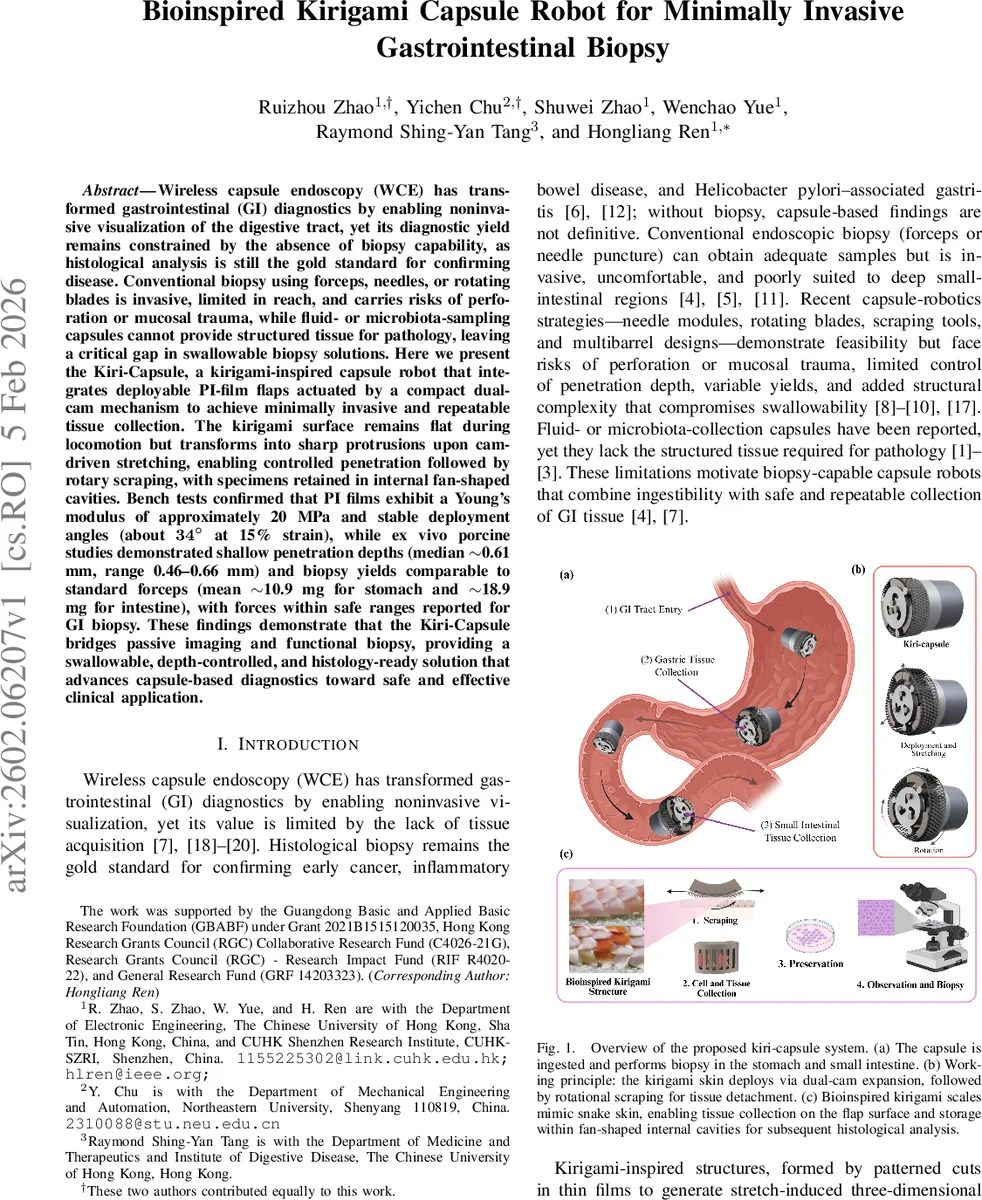
Wireless capsule endoscopy (WCE) has transformed gastrointestinal (GI) diagnostics by enabling noninvasive visualization of the digestive tract, yet its diagnostic yield remains constrained by the absence of biopsy capability, as histological analysis is still the gold standard for confirming disease. Conventional biopsy using forceps, needles, or rotating blades is invasive, limited in reach, and carries risks of perforation or mucosal trauma, while fluid- or microbiota-sampling capsules cannot provide structured tissue for pathology, leaving a critical gap in swallowable biopsy solutions. Here we present the Kiri-Capsule, a kirigami-inspired capsule robot that integrates deployable PI-film flaps actuated by a compact dual-cam mechanism to achieve minimally invasive and repeatable tissue collection. The kirigami surface remains flat during locomotion but transforms into sharp protrusions upon cam-driven stretching, enabling controlled penetration followed by rotary scraping, with specimens retained in internal fan-shaped cavities. Bench tests confirmed that PI films exhibit a Young’s modulus of approximately 20 MPa and stable deployment angles (about 34$^\circ$ at 15% strain), while ex vivo porcine studies demonstrated shallow penetration depths (median $\sim$0.61 mm, range 0.46–0.66 mm) and biopsy yields comparable to standard forceps (mean $\sim$10.9 mg for stomach and $\sim$18.9 mg for intestine), with forces within safe ranges reported for GI biopsy. These findings demonstrate that the Kiri-Capsule bridges passive imaging and functional biopsy, providing a swallowable, depth-controlled, and histology-ready solution that advances capsule-based diagnostics toward safe and effective clinical application.
💡 Research Summary
Wireless capsule endoscopy (WCE) has revolutionized gastrointestinal (GI) diagnostics by providing non‑invasive visualization of the entire tract, yet its clinical impact is limited because it cannot acquire tissue for histopathology. Conventional biopsy tools (forceps, needles, rotating blades) are invasive, require endoscopic access, and carry a risk of perforation, while recent capsule‑robotic concepts that incorporate needles or blades still suffer from uncontrolled penetration depth, high actuation forces, and added structural complexity that compromises swallowability. To address these gaps, the authors present the “Kiri‑Capsule,” a swallowable biopsy robot that exploits kirigami‑inspired deformation of a polyimide (PI) film and a compact dual‑cam actuation mechanism.
Design and Mechanism
A thin PI sheet (selected thickness 0.05 mm) is laser‑cut with a triangular lattice of slits (l₁ = 3 mm, spacing δ₀ = 0.5 mm, opening angle γ = 40°). In the undeformed state the sheet is flat, preserving the capsule’s low‑profile geometry (diameter ≈ 17 mm, length ≈ 22 mm). Two profiled cams, driven by a miniature four‑phase stepper motor through a cross‑shaped shaft, generate a two‑stage motion: (1) the lower cam pushes a translation plate outward while a follower slides along a straight guide, stretching the kirigami sheet and causing the cut units to pop out as sharp protruding flaps; at 15 % axial strain the flaps open to ≈34°. (2) As the upper cam’s curved groove engages the follower, the plate rotates, causing the deployed flaps to sweep clockwise against the mucosa, thereby scraping and detaching superficial tissue. Reversing motor polarity retracts the flaps, enabling repeatable cycles. The pressure‑angle and acceleration of the cam‑follower pair are analytically modeled (μ(ϕ) = arctan
Comments & Academic Discussion
Loading comments...
Leave a Comment