PLATO Hand: Shaping Contact Behavior with Fingernails for Precise Manipulation
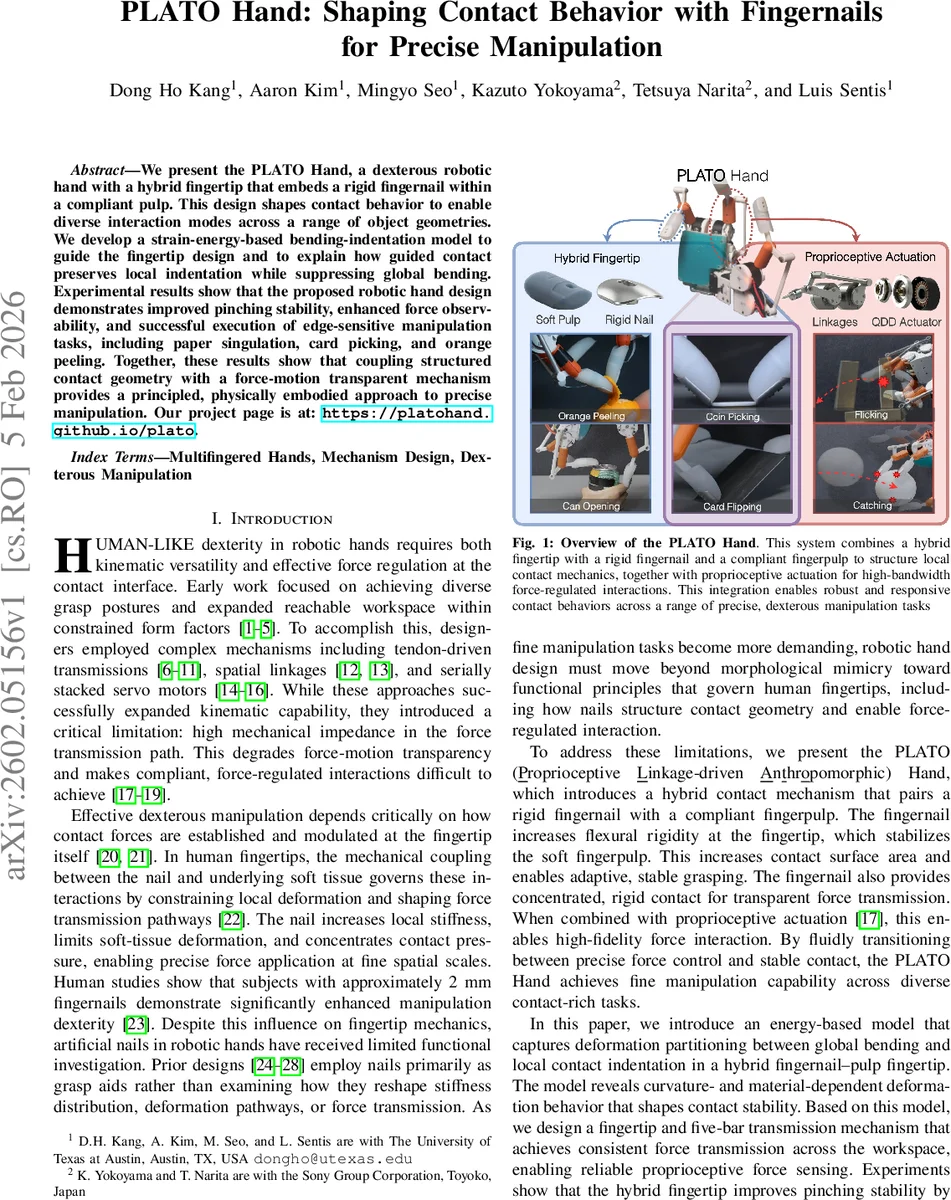
We present the PLATO Hand, a dexterous robotic hand with a hybrid fingertip that embeds a rigid fingernail within a compliant pulp. This design shapes contact behavior to enable diverse interaction modes across a range of object geometries. We develop a strain-energy-based bending-indentation model to guide the fingertip design and to explain how guided contact preserves local indentation while suppressing global bending. Experimental results show that the proposed robotic hand design demonstrates improved pinching stability, enhanced force observability, and successful execution of edge-sensitive manipulation tasks, including paper singulation, card picking, and orange peeling. Together, these results show that coupling structured contact geometry with a force-motion transparent mechanism provides a principled, physically embodied approach to precise manipulation.
💡 Research Summary
The PLATO Hand introduces a biomimetic fingertip that couples a rigid artificial fingernail with a compliant pulp, thereby shaping contact mechanics in a way that mirrors the human fingertip. The authors develop a strain‑energy‑based model that decomposes the total fingertip deformation (δ_total) into global bending (δ_b) and local indentation (δ_c). By integrating the bending moment over a piecewise‑constant flexural rigidity profile, they derive an effective bending stiffness (EI_eff). The contact is modeled as a Hertzian sphere‑half‑space interaction, yielding an indentation energy that scales with δ_c^(5/2). Minimizing the sum of bending and indentation energies under the constraint δ_b + δ_c = δ_total leads to a closed‑form relationship where a dimensionless parameter β = 4E*√R_eff L³/(9 EI_eff) governs the deformation partition. A stiff nail raises EI_eff, reduces β, and forces most of the deformation into local indentation (δ_c ≈ δ_total), while a compliant tip does the opposite. Parameter sweeps show that with a nail stiffness an order of magnitude higher than the pulp, over 95 % of the elastic energy is concentrated in the contact, dramatically increasing the effective contact radius and stabilizing the contact area across curved surfaces.
Mechanically, each finger uses a five‑bar linkage to transmit motion from a low‑inertia, quasi‑direct‑drive (QDD) actuator to the distal joint. The linkage geometry introduces a configuration‑dependent mechanical advantage N(φ₂, φ₄). To avoid large variations that would corrupt force‑torque sensing, the authors formulate a multi‑objective optimization (workspace coverage, mechanical‑advantage variance, transmission index, and link‑length regularization) and solve it with CMA‑ES. The resulting link lengths produce a nearly uniform mechanical advantage across the reachable workspace, preserving high‑bandwidth proprioceptive force feedback. The hand comprises three fingers (index, middle, thumb) with eight actuated DoFs; the thumb adds two extra proximal DoFs driven by compact servos. Each fingertip embeds a distal force‑torque sensor, enabling precise force regulation.
Experimental validation focuses on three aspects. First, pull‑out tests on planar, concave, and convex silicone surfaces (10 A and 20 A pulp) demonstrate that the hybrid fingertip consistently yields higher maximum pull‑out forces—improvements ranging from 23 % to 78 % depending on geometry. The nail’s stiffening effect is especially pronounced on curved surfaces where it constrains local deformation and preserves contact area. Second, force observability tests reveal that the nail‑enhanced tip improves low‑frequency force sensing by ~8 dB and high‑frequency sensitivity by >20 dB, owing to the concentration of strain energy in the contact rather than in global bending. Third, task‑level demonstrations—paper singulation, card picking, and orange‑peel removal—show that the PLATO Hand can reliably manipulate thin, delicate objects that conventional compliant fingertips struggle with; success rates exceed 80 % when the nail is present, whereas nail‑less tips frequently slip or deform excessively.
The paper’s contributions are threefold: (1) a physics‑based fingertip model that quantifies how material stiffness and curvature dictate the partitioning of deformation energy between bending and indentation; (2) a low‑impedance actuation architecture combining QDD motors with an optimized five‑bar transmission, delivering force‑motion transparency and accurate proprioceptive sensing; (3) comprehensive experimental evidence that structured contact geometry, embodied by the artificial nail, substantially enhances pinching stability, force observability, and fine manipulation performance. By demonstrating that “structured contact geometry + transparent actuation” can be physically embodied, the work provides a clear design paradigm for future dexterous robotic hands capable of human‑level precision in tasks involving thin or fragile objects.
Comments & Academic Discussion
Loading comments...
Leave a Comment