Dynamic Constraint Tightening for Nonlinear MPC for Autonomous Racing via Contraction Analysis
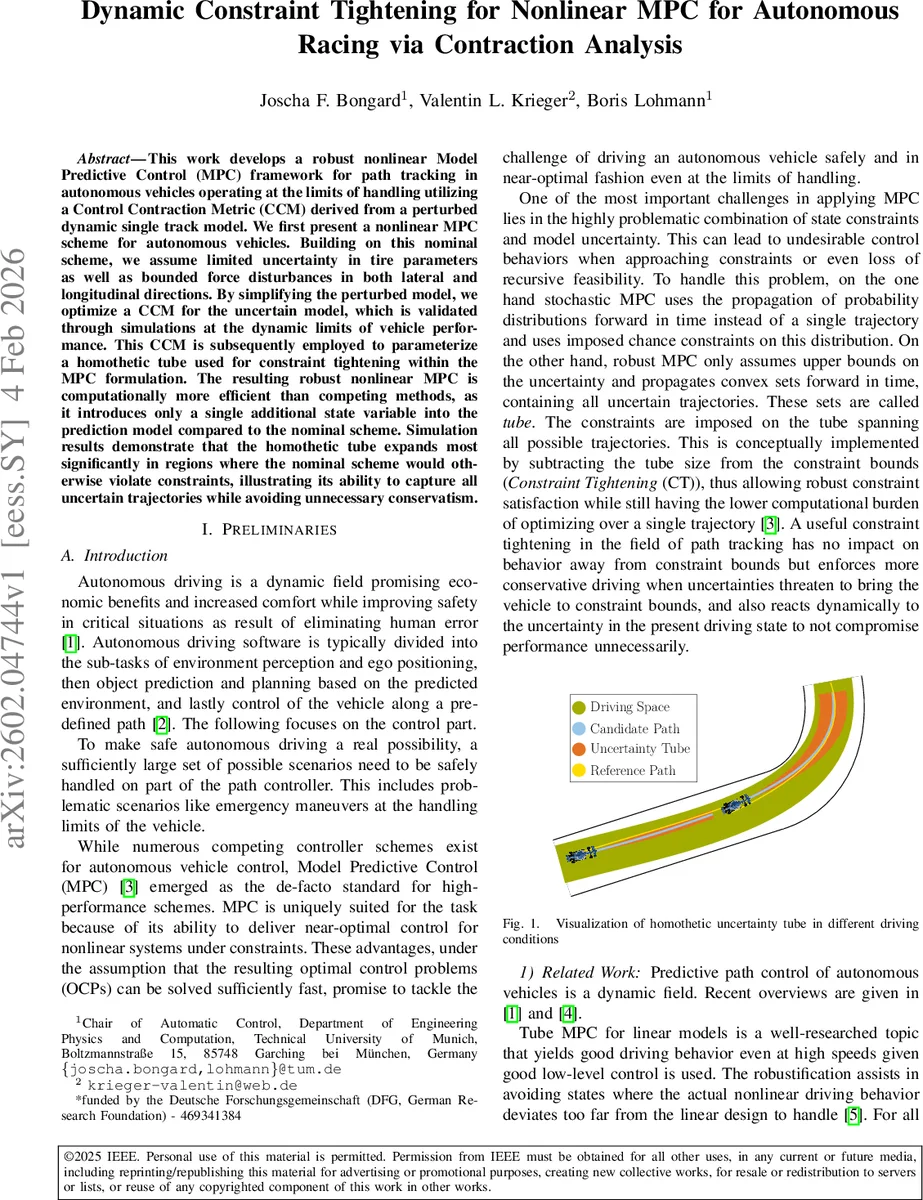
This work develops a robust nonlinear Model Predictive Control (MPC) framework for path tracking in autonomous vehicles operating at the limits of handling utilizing a Control Contraction Metric (CCM) derived from a perturbed dynamic single track model. We first present a nonlinear MPC scheme for autonomous vehicles. Building on this nominal scheme, we assume limited uncertainty in tire parameters as well as bounded force disturbances in both lateral and longitudinal directions. By simplifying the perturbed model, we optimize a CCM for the uncertain model, which is validated through simulations at the dynamic limits of vehicle performance. This CCM is subsequently employed to parameterize a homothetic tube used for constraint tightening within the MPC formulation. The resulting robust nonlinear MPC is computationally more efficient than competing methods, as it introduces only a single additional state variable into the prediction model compared to the nominal scheme. Simulation results demonstrate that the homothetic tube expands most significantly in regions where the nominal scheme would otherwise violate constraints, illustrating its ability to capture all uncertain trajectories while avoiding unnecessary conservatism.
💡 Research Summary
The paper presents a robust nonlinear Model Predictive Control (MPC) framework designed for high‑performance path tracking of autonomous vehicles operating at the limits of handling. The authors start from a dynamic single‑track vehicle model expressed in curvilinear coordinates, which captures the essential lateral and longitudinal dynamics through state variables such as longitudinal and lateral velocities, yaw rate, steering angle, and integrated input dynamics. Tire forces are modeled with a simplified Pacejka “Magic Formula” that reproduces the nonlinear saturation and negative‑slope behavior of real tires near the friction limit.
To address the sensitivity of this model to parameter errors, the authors introduce bounded parametric uncertainties on the Pacejka peak factor (±2.5 % variation) and additive force disturbances in both lateral and longitudinal directions (±150 N). These uncertainties are represented by two scalar parameters θ₁, θ₂ for the front and rear tire forces and by disturbance vectors e₁, e₂ that are linked to throttle and brake commands. The resulting uncertain dynamics are cast into an affine‑in‑uncertainty form f_w(x,u,θ,e)=f(x)+B(x)u+G(x,u)θ+E(x)e.
The core theoretical contribution is the synthesis of a Control Contraction Metric (CCM) for this uncertain system. A CCM is a state‑dependent positive‑definite matrix M(x) that guarantees exponential convergence of any two trajectories under a differential feedback law K(x). The contraction condition
Ṁ + (A+BK)ᵀM + M(A+BK) ≤ –βM,
with bounds M_min ≤ M(x) ≤ M_max, is transformed into a convex Linear Matrix Inequality (LMI) in the dual metric W = M⁻¹. Because the original dynamics are highly nonlinear, the authors approximate all nonlinearities with low‑order polynomials: the Pacejka force law is linearized, trigonometric functions are approximated by third‑order Chebyshev polynomials, and inverse‑tangent terms are linearized. This yields a polynomial representation suitable for Sum‑of‑Squares (SOS) programming.
Using YALMIP and the MOSEK solver, the authors solve the SOS‑based LMI to obtain a state‑dependent metric W(x) and a corresponding differential feedback gain Y = K·W. The metric is computed only over a reduced state subspace {v_x, v_y, ψ̇} that captures the physically relevant operating envelope, and the polynomial degree is limited to four to keep the problem tractable. The resulting CCM is not constant; its contraction rate β is deliberately chosen small to ensure feasibility across the entire admissible set, and the authors validate the contraction by eigenvalue analysis on a large set of simulated trajectories, including worst‑case scenarios.
With the CCM in hand, the authors construct a homothetic (scaled) tube that encloses all possible trajectories generated by the uncertain model. The tube size is parameterized by a single scalar “tube scaling” state λ(t) that evolves according to a simple differential equation derived from the CCM contraction rate. This scalar multiplies a fixed shape (typically a unit ball) to produce a time‑varying uncertainty set. Because λ(t) grows only when the predicted trajectory approaches state or input constraints, the tube expands dynamically where needed and shrinks elsewhere, avoiding the conservatism of static tubes.
The tube is incorporated into the MPC formulation via constraint tightening: each original constraint (e.g., lateral deviation limits, steering angle bounds, combined friction octagon) is reduced by λ(t)·Δ, where Δ denotes the pre‑computed tube radius. The resulting robust OCP remains a single‑trajectory optimization problem, with only one additional decision variable (λ) compared to the nominal MPC. The cost function penalizes lateral deviation, deviation rate, speed tracking error, and control effort, while terminal constraints enforce alignment with the planner’s desired speed.
Simulation studies are performed on a demanding raceline that pushes the vehicle to its lateral, longitudinal, and combined friction limits. The authors compare three controllers: (i) a nominal nonlinear MPC without robustness, (ii) a robust MPC with a fixed‑size tube, and (iii) the proposed CCM‑based dynamic tube MPC. Results show that the nominal controller frequently violates constraints when uncertainties are present, while the fixed‑tube approach remains safe but suffers from excessive conservatism, especially early in the prediction horizon. The proposed method successfully avoids all constraint violations, maintains high tracking performance, and only modestly increases computational load. Average solve times stay below 15 ms on a standard desktop CPU, demonstrating real‑time feasibility.
In summary, the paper makes three key contributions: (1) the first derivation of a control contraction metric for a nonlinear vehicle model with realistic tire dynamics, (2) a novel homothetic tube construction that leverages the CCM to achieve dynamic, minimally conservative constraint tightening, and (3) an implementation that adds only one extra state to the MPC, preserving real‑time solvability. The approach bridges the gap between high‑fidelity nonlinear vehicle modeling and the stringent computational demands of autonomous racing, and it holds promise for broader autonomous driving applications where safety margins must adapt to rapidly changing uncertainty levels.
Comments & Academic Discussion
Loading comments...
Leave a Comment