Learning-based Observer for Coupled Disturbance
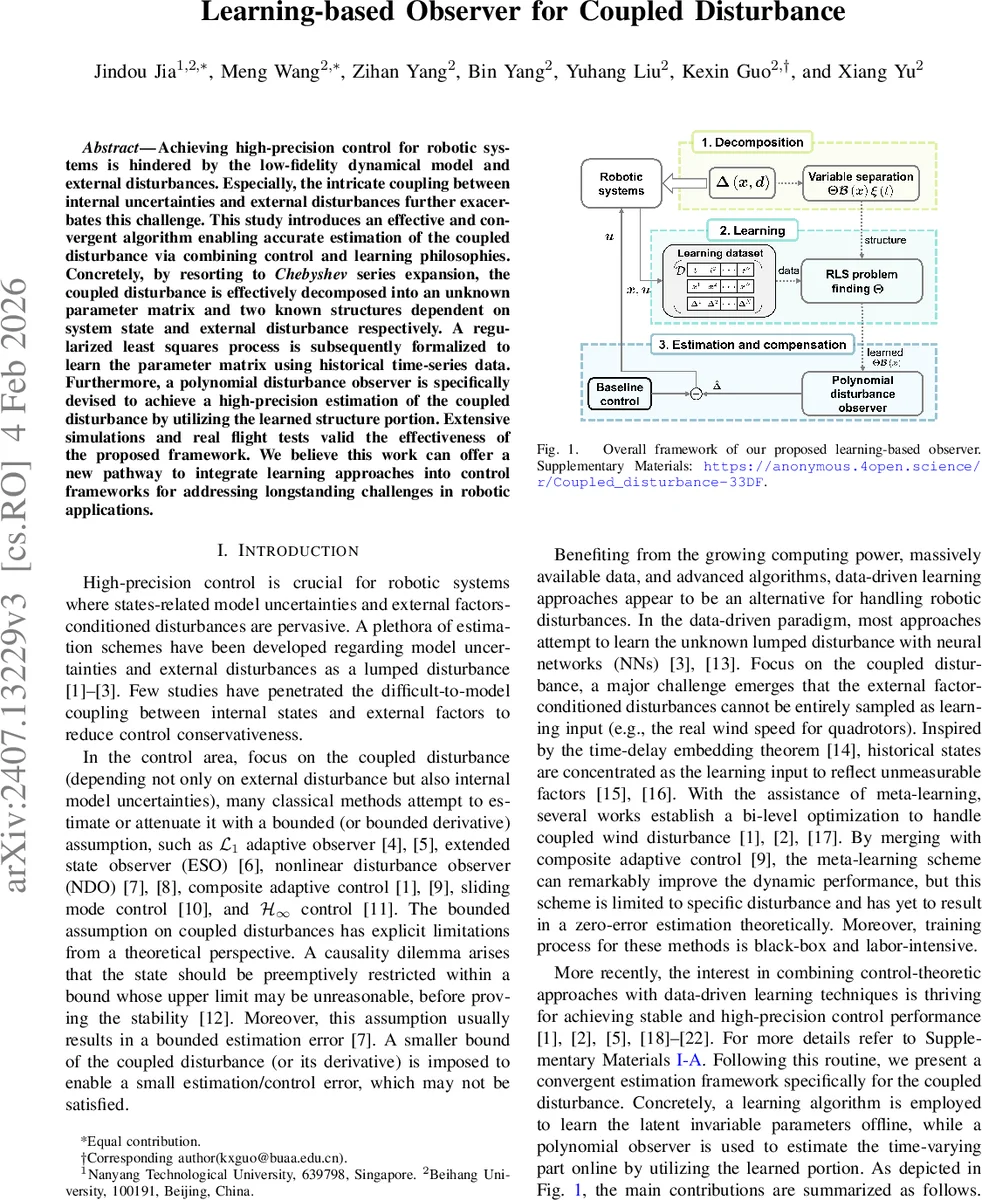
Achieving high-precision control for robotic systems is hindered by the low-fidelity dynamical model and external disturbances. Especially, the intricate coupling between internal uncertainties and external disturbances further exacerbates this challenge. This study introduces an effective and convergent algorithm enabling accurate estimation of the coupled disturbance via combining control and learning philosophies. Concretely, by resorting to Chebyshev series expansion, the coupled disturbance is firstly decomposed into an unknown parameter matrix and two known structures dependent on system state and external disturbance respectively. A regularized least squares algorithm is subsequently formalized to learn the parameter matrix using historical time-series data. Finally, a polynomial disturbance observer is specifically devised to achieve a high-precision estimation of the coupled disturbance by utilizing the learned portion. The proposed algorithm is evaluated through extensive simulations and real flight tests. We believe this work can offer a new pathway to integrate learning approaches into control frameworks for addressing longstanding challenges in robotic applications.
💡 Research Summary
This paper tackles the longstanding problem of estimating and compensating coupled disturbances in robotic systems—disturbances that arise from the interaction of internal model uncertainties and external environmental factors. Traditional approaches treat the total disturbance as a lumped term and rely on bounded‑or‑bounded‑derivative assumptions to guarantee stability. Such assumptions lead to three fundamental drawbacks: (L‑1) a logical paradox where the system state must be pre‑bounded before stability can be proved; (L‑2) the bound may be violated after disturbance compensation, especially when the disturbance depends on the state; and (L‑3) the estimation error is directly tied to the size of the bound, often resulting in overly conservative performance.
The authors propose a three‑stage framework that eliminates the need for these restrictive assumptions. First, they introduce a variable‑decomposition theorem (Theorem 1) based on Chebyshev polynomial expansion. Any analytic coupled disturbance Δ(x,d) can be expressed as Θ B(x) ξ(d) plus an arbitrarily small residual, where B(x) is a known matrix function of the state, ξ(d) is a known vector function of the external disturbance, and Θ is a constant unknown parameter matrix. This decomposition isolates all unknown constants into Θ, making the learning problem linear and interpretable.
Second, the unknown matrix Θ is learned offline using a regularized least‑squares (RLS) formulation. From a dataset of recorded states, inputs, and computed disturbances (Δ = ˙x – f_x(x) – f_u(x)u), the authors solve a convex quadratic problem with a closed‑form solution Θ* = (∑ B_n ξ_n ξ_nᵀ B_nᵀ)⁻¹ ∑ Δ_n ξ_nᵀ B_nᵀ, where the regularization term δ prevents over‑fitting. The learning step requires only modest data (a few percent of the total operation time) and is computationally lightweight.
Third, during online operation a polynomial disturbance observer is constructed. The time‑varying part of the disturbance, which cannot be directly measured, is represented by Chebyshev polynomials of the time variable ξ(t). Using the learned Θ and the current state to compute B(x), the observer estimates the total disturbance as ˆΔ = Θ B(x) ξ(t). An observer gain Γ_h is updated in real time for the underlying time‑varying system, guaranteeing convergence without any bounded‑derivative assumption (Theorem 2). The observer is essentially a set of matrix‑vector multiplications and polynomial evaluations, making it suitable for embedded processors.
The paper validates the approach through extensive simulations (2‑DOF manipulators, 6‑DOF quadrotors) and real‑world flight tests (indoor motion‑capture and outdoor GPS environments). Compared with L₁ adaptive observers, extended state observers (ESO), and nonlinear disturbance observers (NDO), the proposed method achieves significantly lower mean absolute error (MAE) and faster convergence of the estimation error, even under rapidly changing wind disturbances. Moreover, unlike deep‑neural‑network (DNN) based black‑box methods, the learned parameters are transparent, and the computational load is far lower.
Key contributions are: (1) a rigorous analytical decomposition of coupled disturbances into interpretable components; (2) a learning‑observer hybrid that removes bounded‑disturbance assumptions while providing provable convergence; and (3) a lightweight, explainable implementation that outperforms both classic model‑based observers and modern DNN‑based estimators. The authors suggest future work on multi‑robot extensions, alternative orthogonal polynomial bases, and adaptive tuning of the regularization and polynomial order to further enhance robustness across diverse operating conditions.
Comments & Academic Discussion
Loading comments...
Leave a Comment