Emergence and co-existence of periodic and unstructured motion in future-avoiding random walks
Self-avoiding random walks on graphs can be seen as walkers interacting with their own past history. This letter considers a complementary class of dynamics: Mutual future avoiding random walks (MFARWs), where stochastically driven walkers are avoiding each others planned future trajectories. Such systems arise naturally in conceptual models of shared mobility. We show that periodic behavior emerges spontaneously in such MFARWs, and that periodic and unstructured behavior coexist, providing a first example of Chimera style behavior of non-oscillatory paths on networks. Further, we analytically describe and predict the onset of structure. We find that the phase transition from unstructured to periodic behavior is driven by a novel mechanism of self-amplifying coupling to the periodic components of the stochastic drivers of the system. In the context of shared mobility applications, these Chimera states imply a regime of naturally stable co-existence between flexible and line-based public transport.
💡 Research Summary
This paper introduces a novel class of interacting path dynamics called Mutual Future‑Avoiding Random Walks (MFARWs). Unlike traditional self‑avoiding walks that avoid a walker’s own past, MFARWs are defined by walkers that avoid the planned future trajectories of other walkers. The authors motivate this model with shared‑mobility systems, where autonomous vehicles must incorporate new passenger requests without disrupting the future portions of already‑assigned routes.
Two dispatching algorithms are examined. The No‑Detour‑Heuristic (NDH) inserts a request at the earliest possible delivery time while guaranteeing that no passenger’s travel time is increased. The Minimal‑Fleet‑Distance (MFD) algorithm evaluates all feasible insertions and selects the one that minimizes the total additional distance traveled by the fleet. Both algorithms therefore create an all‑to‑all coupling among vehicles through competition for future‑segment usage.
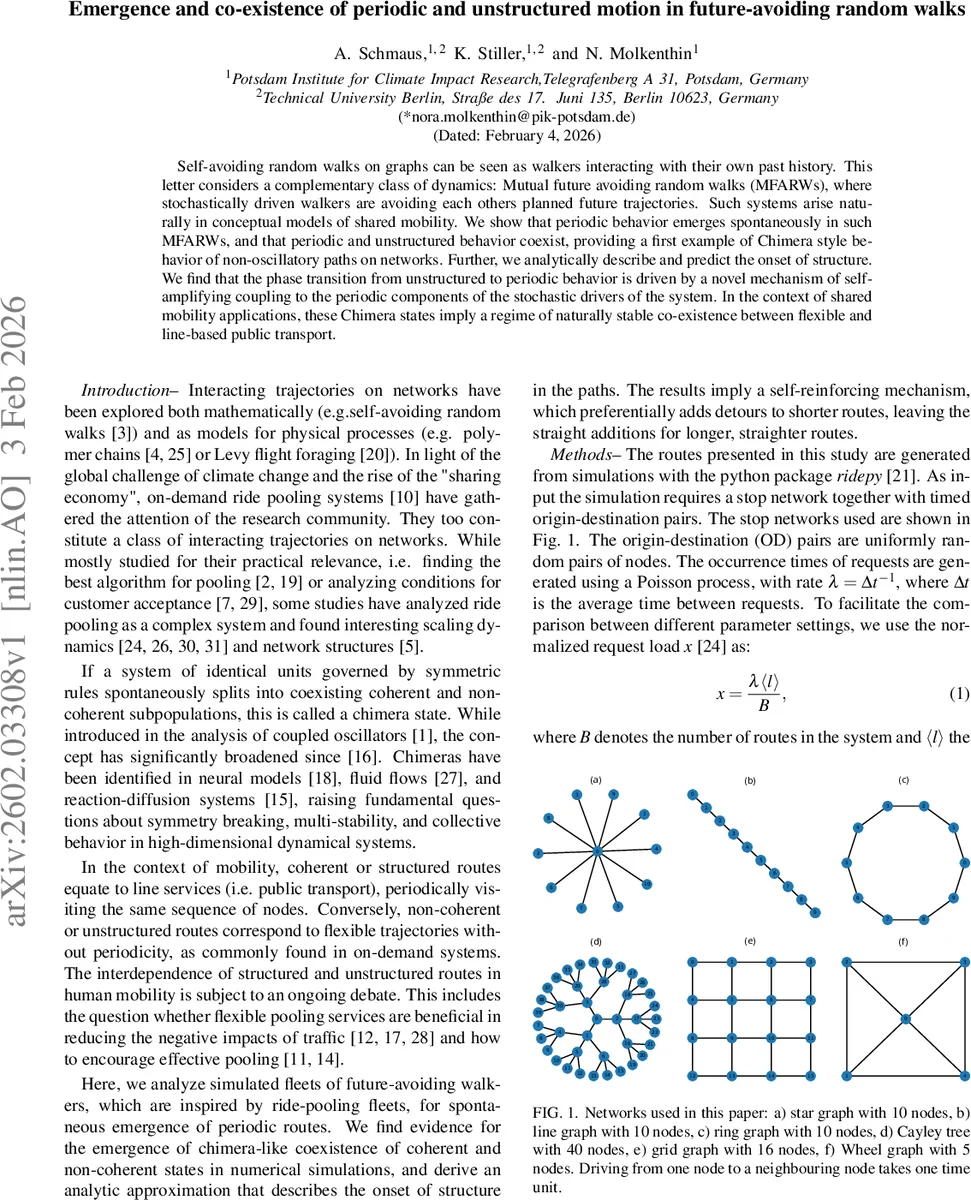
Simulations are performed with the Python package ridepy on six canonical network topologies (star, line, ring, Cayley tree, grid, wheel). Each experiment uses 100 vehicles, 100 000 Poisson‑distributed requests, and a normalized load parameter (x = \lambda \langle l\rangle / B) ranging from 0.1 to 20. The authors quantify the system with three main observables: (i) link usage (\rho(i)), the fraction of all routes that traverse edge (i); (ii) value‑weighted recurrence plots, which visualise repeated node visits and expose periodic structure; and (iii) periodicity fraction (F), defined as the normalized average diagonal line length in the recurrence matrix (Eq. 5).
At very low load ((x\ll1)) every vehicle follows a sequence of shortest‑path hops between uniformly random origin‑destination pairs, and link usage matches the normalized edge betweenness centrality. As load increases, the simulated link usage deviates from this null model and aligns closely with a stochastic Traveling‑Salesperson‑Problem (TSP) walk, indicating that vehicles tend to form longer, more systematic tours.
Recurrence plots reveal that, for intermediate and high loads, a subset of vehicles develops persistent diagonal lines, i.e., fully periodic routes that repeat the same node sequence over the entire simulation. Other vehicles show no long diagonals, indicating unstructured, aperiodic motion. The fraction (F) is near zero for low loads, rises sharply around a critical load that depends on network topology, and can exceed one for the MFD dispatcher (meaning periodic routes are on average longer than the fleet’s mean route length). Notably, 1‑dimensional topologies (line, ring) and the wheel graph exhibit the strongest transition, while highly branched structures (star, Cayley tree) remain largely aperiodic regardless of load.
To explain the emergence of this mixed state, the authors develop a mean‑field theory for the ring graph. They compute the probability (P_c) that a vehicle will reverse direction when a new request is inserted, which depends on the current planned route length, the average inter‑request time (\Delta\tau), the number of vehicles (B), and the load (x) (Eq. 6). Assuming independence across requests, the probability that a given vehicle remains periodic for the whole simulation is approximated as (P_p = 1 - (1-(1-P_c)^r)^B), where (r) is the number of requests per vehicle. The periodicity fraction is then taken as (F \approx P_p) (Eq. 7). This analytic curve accurately predicts the location of the transition and its steepening with larger fleet sizes, though it overestimates the sharpness due to simplifying assumptions.
The coexistence of coherent (periodic) and incoherent (aperiodic) subpopulations in a system of identical, non‑oscillatory agents constitutes a chimera state—a phenomenon previously reported only in coupled oscillator networks. Here, the incoherent sub‑ensemble provides a stabilising “noise” that allows the coherent sub‑ensemble to lock into a regular tour, mirroring mechanisms described in earlier chimera literature.
From an application perspective, the findings suggest that line‑based public transport (periodic routes) and flexible on‑demand pooling (aperiodic routes) can naturally coexist in a shared‑mobility system without explicit coordination. By tuning the request load (x) and fleet size (B), operators could deliberately steer the system toward a desired balance between structured line service and flexible ride‑pooling. The mean‑field model offers a predictive tool for estimating the critical load at which periodic routes become statistically inevitable.
In summary, the paper demonstrates that mutual future‑avoidance introduces a self‑organising mechanism that yields spontaneous periodic tours alongside irregular ones, provides a quantitative analytical description of the phase transition, and opens new avenues for designing resilient, hybrid mobility services based on emergent chimera dynamics.
Comments & Academic Discussion
Loading comments...
Leave a Comment