Towards Considerate Embodied AI: Co-Designing Situated Multi-Site Healthcare Robots from Abstract Concepts to High-Fidelity Prototypes
Co-design is essential for grounding embodied artificial intelligence (AI) systems in real-world contexts, especially high-stakes domains such as healthcare. While prior work has explored multidisciplinary collaboration, iterative prototyping, and support for non-technical participants, few have interwoven these into a sustained co-design process. Such efforts often target one context and low-fidelity stages, limiting the generalizability of findings and obscuring how participants’ ideas evolve. To address these limitations, we conducted a 14-week workshop with a multidisciplinary team of 22 participants, centered around how embodied AI can reduce non-value-added task burdens in three healthcare settings: emergency departments, long-term rehabilitation facilities, and sleep disorder clinics. We found that the iterative progression from abstract brainstorming to high-fidelity prototypes, supported by educational scaffolds, enabled participants to understand real-world trade-offs and generate more deployable solutions. We propose eight guidelines for co-designing more considerate embodied AI: attuned to context, responsive to social dynamics, mindful of expectations, and grounded in deployment. Project Page: https://byc-sophie.github.io/Towards-Considerate-Embodied-AI/
💡 Research Summary
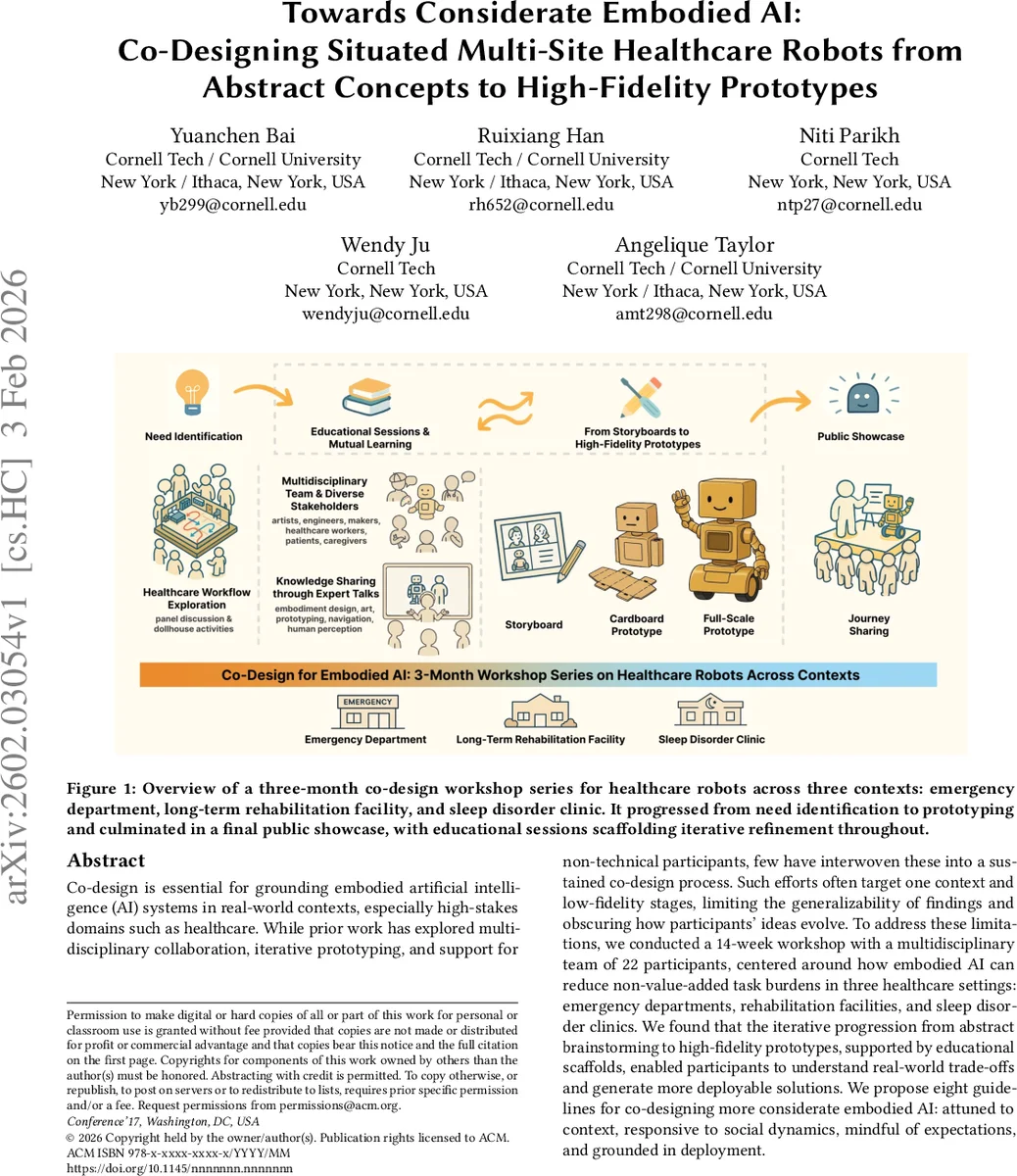
This paper presents a comprehensive co‑design methodology for embodied AI in healthcare, focusing on three distinct settings—emergency departments (ED), long‑term rehabilitation facilities (LTR), and sleep‑disorder clinics (SDC). Recognizing that non‑value‑added (NVA) tasks such as excessive paperwork, unnecessary movement, and redundant communication burden healthcare workers (HCWs) and detract from patient care, the authors organized a 14‑week workshop series involving 22 participants from multiple disciplines (clinicians, engineers, designers, artists, and patients).
The workshop followed a four‑stage pipeline: (1) Needs identification and workflow mapping, where participants documented NVA tasks specific to each setting; (2) Ideation and storyboard creation, supported by educational scaffolding that introduced basic robotics, multimodal AI, and ethical considerations to non‑technical stakeholders; (3) Cardboard prototyping, allowing rapid physical exploration of robot size, form, and spatial constraints; and (4) High‑fidelity functional prototyping, producing motor‑equipped, sensor‑rich robots that were tested in realistic clinical spaces.
Key findings include:
- Context‑specific robot roles – while all three sites share common logistics and documentation needs, each environment demands unique capabilities (e.g., rapid navigation in chaotic EDs, emotional support in LTRs, personalized protocol handling in SDCs).
- Value of sustained multidisciplinary collaboration – continuous interaction among clinicians, engineers, and designers enabled co‑construction of meaning, reducing the gap between clinical expectations and technical feasibility.
- Importance of high‑fidelity prototypes – physical, functional prototypes revealed real‑world constraints (navigation conflicts, proxemic discomfort, noise) that low‑fidelity artifacts could not capture, leading to early design revisions.
- Effectiveness of educational scaffolding – hands‑on demos, technology‑history briefings, and implementation walkthroughs empowered non‑technical participants to contribute substantively, especially during the transition from abstract ideas to tangible prototypes.
From these insights the authors derive eight design guidelines for “considerate embodied AI”: (1) ground designs in contextual needs, (2) attend to social dynamics, (3) clarify stakeholder expectations, (4) incorporate deployment feasibility, (5) build embodied literacy through staged education, (6) explicitly model physical, temporal, and spatial constraints, (7) enable cross‑context learning, and (8) embed ethics and privacy from the outset.
The study demonstrates that a long‑term, high‑fidelity co‑design process can produce more deployable, context‑aware healthcare robots and offers a replicable framework for future embodied AI projects in high‑stakes domains.
Comments & Academic Discussion
Loading comments...
Leave a Comment