Modular Isoperimetric Soft Robotic Truss for Lunar Applications
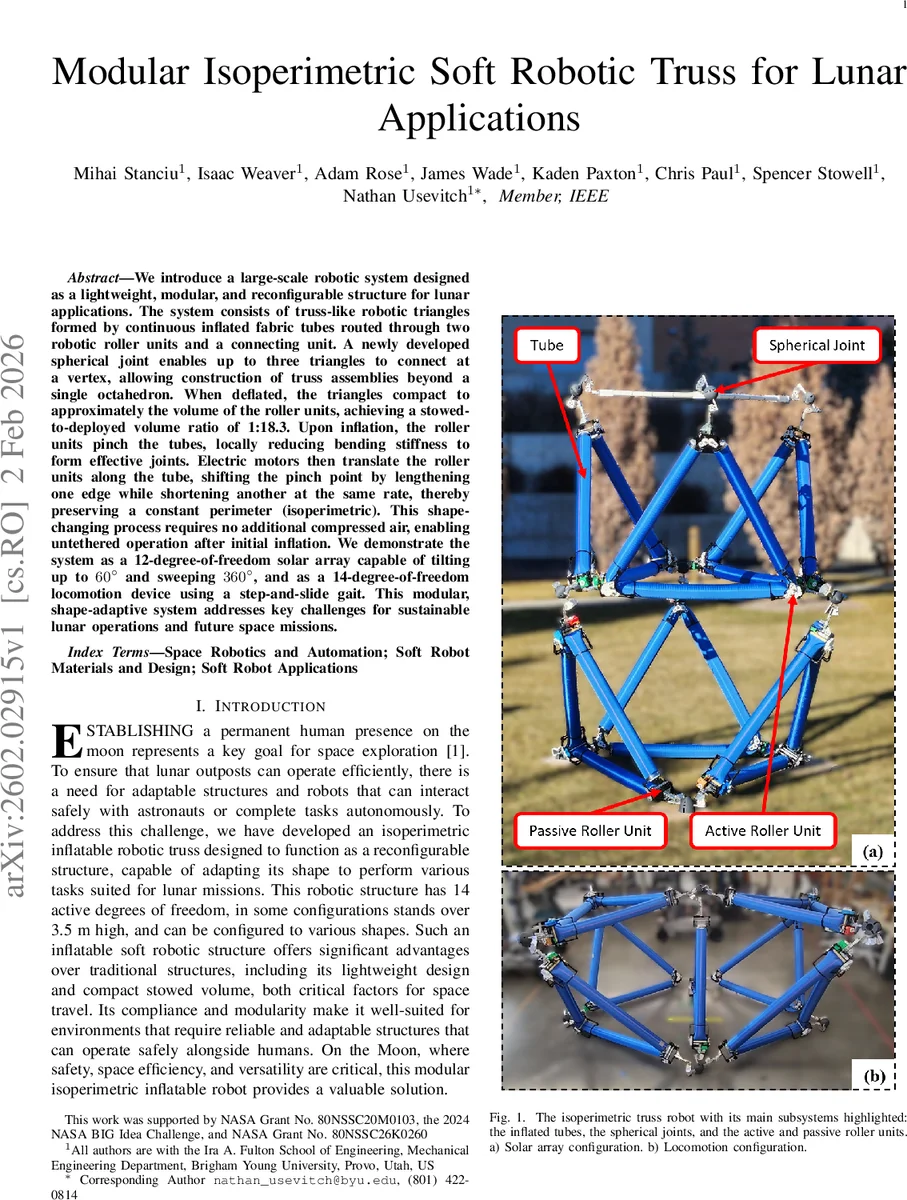
We introduce a large-scale robotic system designed as a lightweight, modular, and reconfigurable structure for lunar applications. The system consists of truss-like robotic triangles formed by continuous inflated fabric tubes routed through two robotic roller units and a connecting unit. A newly developed spherical joint enables up to three triangles to connect at a vertex, allowing construction of truss assemblies beyond a single octahedron. When deflated, the triangles compact to approximately the volume of the roller units, achieving a stowed-to-deployed volume ratio of 1:18.3. Upon inflation, the roller units pinch the tubes, locally reducing bending stiffness to form effective joints. Electric motors then translate the roller units along the tube, shifting the pinch point by lengthening one edge while shortening another at the same rate, thereby preserving a constant perimeter (isoperimetric). This shape-changing process requires no additional compressed air, enabling untethered operation after initial inflation. We demonstrate the system as a 12-degree-of-freedom solar array capable of tilting up to 60 degrees and sweeping 360 degrees, and as a 14-degree-of-freedom locomotion device using a step-and-slide gait. This modular, shape-adaptive system addresses key challenges for sustainable lunar operations and future space missions.
💡 Research Summary
The paper presents a novel soft‑robotic truss system designed for lunar applications, emphasizing lightweight construction, modularity, and reconfigurability. The core structural element is a continuously inflated fabric tube that is routed through two active roller units and a passive roller unit to form a triangular panel. Each active roller houses a motor and a compact gear train that pinches the tube, locally reducing its bending stiffness, and then translates along the tube. By moving the pinch point, one edge of the triangle lengthens while another shortens at the same rate, preserving the total perimeter—a principle the authors term “isoperimetric.” Because the tube’s internal pressure remains constant after the initial inflation, shape change requires no additional compressed air, enabling untethered operation on the Moon.
A key innovation is the spherical joint, which allows three or more triangular panels to connect at a single vertex while sharing a virtual center of rotation. This overcomes the limitation of earlier designs that could only join two panels per vertex, and it enables the construction of stacked octahedral assemblies rather than a single octahedron. The authors demonstrate two functional configurations: a 12‑degree‑of‑freedom (DoF) solar array and a 14‑DoF locomotion platform. The solar array consists of six triangles forming two vertically stacked octahedra with a static equilateral solar panel on top; it can tilt up to 60° and sweep a full 360°, providing versatile orientation for power generation. The locomotion platform uses seven triangles arranged as two symmetric octahedra about a central triangle, executing a step‑and‑slide gait for stable movement across lunar terrain.
Mechanical improvements over prior work include a redesign of the active roller geometry. The new design increases the center‑to‑center distance between roller shafts to 38.5 mm and the shaft diameter to 19.5 mm, allowing operation at higher internal pressures (up to ~120 kPa) while simplifying the gear train. These changes, together with the use of lightweight polyoxymethylene (POM) components, aluminum spacers, and carbon‑steel shafts with rubber sleeves, reduce the mass of the active roller by 31 % and the passive roller by 38 % compared with the earlier prototype. The inflatable tubes are off‑the‑shelf discharge hoses (3.65 m long, 100 mm diameter, 1.6 mm wall) with a nylon outer layer and polyurethane inner lining, sealed to custom PLA plugs using rubber tape and T‑bolt clamps to maintain airtightness.
Performance metrics show a stowed‑to‑deployed volume ratio of 1:18.3, making the system highly compact for launch. The modular nature of the spherical joints and roller units allows rapid assembly on the lunar surface with minimal tools, addressing the logistical constraints of lunar construction. The authors discuss the system’s advantages over traditional rigid variable‑geometry trusses, such as continuous deformation capability, inherent compliance for safe human‑robot interaction, and reduced actuator stroke limits.
Limitations identified include the need for long‑duration pressure maintenance in the harsh lunar environment, thermal management under extreme temperature swings, and validation of durability against lunar dust abrasion. Future work is proposed to explore high‑pressure, low‑temperature‑resistant materials, integrated health‑monitoring sensors, autonomous deployment algorithms, and full‑scale testing in vacuum‑chamber and lunar‑analog environments.
Overall, the modular isoperimetric soft‑robotic truss offers a promising platform for sustainable lunar infrastructure, capable of serving as a reconfigurable solar array, a mobile manipulator, or a structural scaffold, thereby reducing the payload mass and increasing the functional versatility of future lunar missions.
Comments & Academic Discussion
Loading comments...
Leave a Comment