SPARC: Spine with Prismatic and Revolute Compliance for Quadruped Robots
Quadruped mammals coordinate spinal bending and axial compression to enhance locomotion agility and efficiency. However, existing robotic spines typically lack the active compliance required to support such dynamic behaviours. We present SPARC, a compact 3-DoF sagittal-plane spine module that enables simultaneous revolute and prismatic motions within a 1.26 kg package. Using a floating-base impedance controller, we facilitate independent, task-space tuning of spinal stiffness and damping to mimic biological load-bearing strategies. Benchtop experiments confirm high-fidelity rendering of commanded impedance, with linear force-displacement error within 1.5%. Systematic locomotion simulations reveal a critical speed-dependency: while low-speed efficiency is insensitive to spinal properties, precise impedance tuning becomes indispensable for high-speed performance. Our results demonstrate that an optimally compliant spine reduces power consumption by 21% at 0.9 m/s compared to a rigid-spine baseline. This efficiency gain is mechanistically attributed to the spine’s role in augmenting stride length and acting as a mechanical low-pass filter to attenuate high-frequency torque fluctuations. SPARC provides an open-source platform for systematic studies of spine compliance in legged locomotion. Available at: github.com/YueWang996/sparc
💡 Research Summary
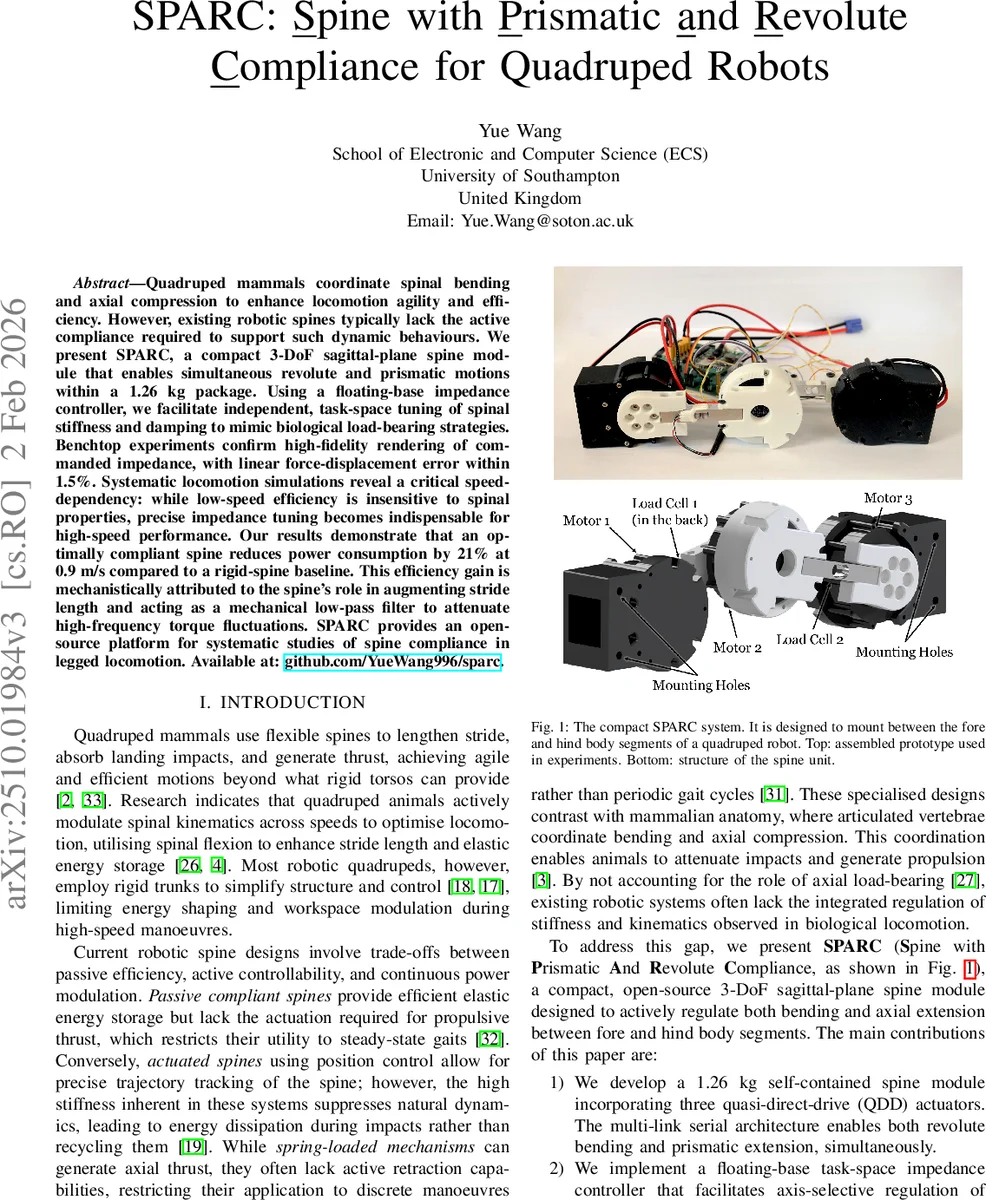
The paper introduces SPARC (Spine with Prismatic and Revolute Compliance), a compact 3‑DoF sagittal‑plane spine module designed for quadruped robots. Weighing only 1.26 kg, the device integrates three quasi‑direct‑drive (QDD) actuators that provide simultaneous revolute (pitch) and prismatic (axial extension) motions, thereby mimicking the dual‑mode deformation observed in mammalian spines. The hardware features lightweight 3D‑printed links with mass concentrated near the joints, a 6‑axis IMU for real‑time orientation, and two load cells embedded in the central link for direct force measurement.
The core contribution lies in a floating‑base task‑space impedance controller that enables independent, axis‑selective tuning of stiffness (K) and damping (D) along the horizontal (x), vertical (z), and pitch (θ) directions. The robot’s full dynamics are expressed in the standard floating‑base form M(q)·\dot v + h(q,v) = τ + JᵀF_ext. To preserve natural inertial compliance, the coupling term M_sb·\dot v_base is deliberately omitted, allowing the spine to lag behind rapid base accelerations as a biological spine would. Desired compliance is modeled as a virtual mass‑spring‑damper system Λ·\ddot x̃ + D·\dot x̃ + K·x̃ = –F_ext, where Λ is the operational‑space inertia computed via a damped least‑squares inversion of J_s·M_ss⁻¹·J_sᵀ. The control law τ_s = h_s + J_sᵀ(F_imp – F_comp) generates torque commands that realize the target impedance while compensating for Coriolis, centrifugal, and gravity effects. Joint friction is mitigated using a smooth Stribeck model, ensuring low‑chatter torque output near zero velocity.
Software runs on a FreeRTOS kernel with a 1 kHz real‑time loop. Optimized implementations of the Composite Rigid Body Algorithm (CRBA) and Recursive Newton–Euler Algorithm (RNEA) compute M and h each cycle, and the ARM CMSIS‑DSP library accelerates dense matrix operations. The entire pipeline executes in ~290 µs, leaving a comfortable 70 % margin for high‑frequency impedance tracking.
Experimental validation proceeds in two phases. Bench‑top tests on the isolated spine demonstrate high‑fidelity stiffness rendering (force‑displacement error < 1.5 %) and accurate step‑response dynamics. Full‑body locomotion is evaluated in MuJoCo by integrating SPARC into a custom 8‑DoF quadruped model. A Raibert‑style bounding gait generator supplies leg trajectories, while the spine impedance controller runs concurrently. Simulations across speeds from 0.3 m/s to 0.9 m/s reveal a speed‑dependent effect: at low speeds, variations in spinal stiffness have negligible impact on energetic cost, but at high speeds precise impedance tuning becomes critical. Optimally tuned stiffness and damping reduce overall power consumption by 21 % at 0.9 m/s relative to a rigid‑spine baseline. The authors attribute this gain to two mechanisms: (1) the compliant spine lengthens stride by allowing controlled axial compression and extension, and (2) it acts as a mechanical low‑pass filter, attenuating high‑frequency torque fluctuations that would otherwise be dissipated by the actuators.
Finally, the complete hardware design files, firmware, and simulation models are released as open‑source at the provided GitHub repository, offering the community a ready‑to‑use platform for systematic studies of spinal compliance in legged locomotion. The paper concludes that actively controllable, anisotropic spine compliance is a key enabler for high‑speed, energy‑efficient quadruped locomotion, bridging the gap between biologically inspired morphology and practical robotic implementation.
Comments & Academic Discussion
Loading comments...
Leave a Comment